旋轉調制光纖陀螺慣導尋北精度探索
2015-03-11 05:32:22徐海剛郭元江李志峰李海軍
導航定位與授時 2015年3期
徐海剛,郭元江,李志峰,李海軍,劉 沖
(北京自動化控制設備研究所,北京100074)
?
旋轉調制光纖陀螺慣導尋北精度探索
徐海剛,郭元江,李志峰,李海軍,劉 沖
(北京自動化控制設備研究所,北京100074)
高精度尋北是旋轉調制光纖陀螺慣導實現高精度導航的前提,也是其技術優勢的體現。針對當前旋轉調制光纖陀螺慣導在快速高精度尋北中遇到的問題,對其尋北精度極限進行了深入研究,梳理出4項最主要的影響因素,對其影響機理、誤差模型、量級進行了深入的分析,并通過樣機試驗進行了驗證。結果表明,盡管隨機游走系數是制約尋北精度極限的最終因素,但陀螺刻度系數誤差、擾動速度、航向效應等誤差處理不好,將嚴重影響旋轉調制尋北精度;通過采取措施,高精度光纖陀螺旋轉調制慣導5min尋北精度已達到35″(3σ),進一步提高精度的措施正在研究中。
尋北精度極限;旋轉調制;光纖陀螺;隨機游走;航向效應
0 引言
光纖陀螺在工程應用上具有全固態、環境適應性強、制造簡單等特點;光纖陀螺慣導系統已開始在陸海空天各個領域的武器中獲得大量應用[1-3]。隨著國內對旋轉調制技術研究的不斷深入,人們逐漸認識到,旋轉調制光纖陀螺慣導能夠充分發揮光纖陀螺隨機游走系數的優勢[4],同時抑制其零位漂移對溫度較為敏感的不足,有望實現高精度的尋北和導航,滿足未來遠程導彈、長航時艦艇、導彈發射車等武器裝備對高精度、快反應、小體積慣導系統的需求,為此,國內開展了大量的相關研究[5-7]。
尋北是實現高精度導航的第一步。在研制旋轉調制光纖陀螺慣導系統的過程中發現,盡管樣機的旋轉調制尋北性能體現出了一定的優勢,但并未達到理論上的精度極限;為此,進行了全面深入的分析、改進和試驗,有效地提高了尋北的精度,為下一步的工作奠定基礎。
1 樣機情況及問題
旋轉調制光纖陀螺慣導系統在對準過程中,陀螺常值漂移以及受溫度影響緩慢變化的漂移都可被調制平均,只有隨機游走噪聲不受調制作用,是理論上影響尋北精度極限φu ss的因素,通過分析,其關系可表示為
(1)

為進一步驗證旋轉調制光纖陀螺慣導的性能潛力,研制了單軸旋轉調制光纖慣導樣機,該樣機由光纖陀螺、石英撓性加速度計、旋轉機構、導航計算機、二次電源組成。其中,光纖陀螺和加速度計的主要技術指標分別如表1和表2所示。

表1 光纖陀螺性能指標Tab.1 The accuracy of FOG

表2 加速度計性能指標Tab.2 The accuracy of accelerometer
這里主要研究5min的尋北精度。根據式(1),該樣機理論上5min尋北精度優于15″(3σ)。采用國軍標定位定向系統定向精度測試方法,在轉臺上對樣機進行了八位置尋北試驗。其中,某次尋北過程中航向角的變化曲線如圖1所示,八位置尋北結果如表3所示。
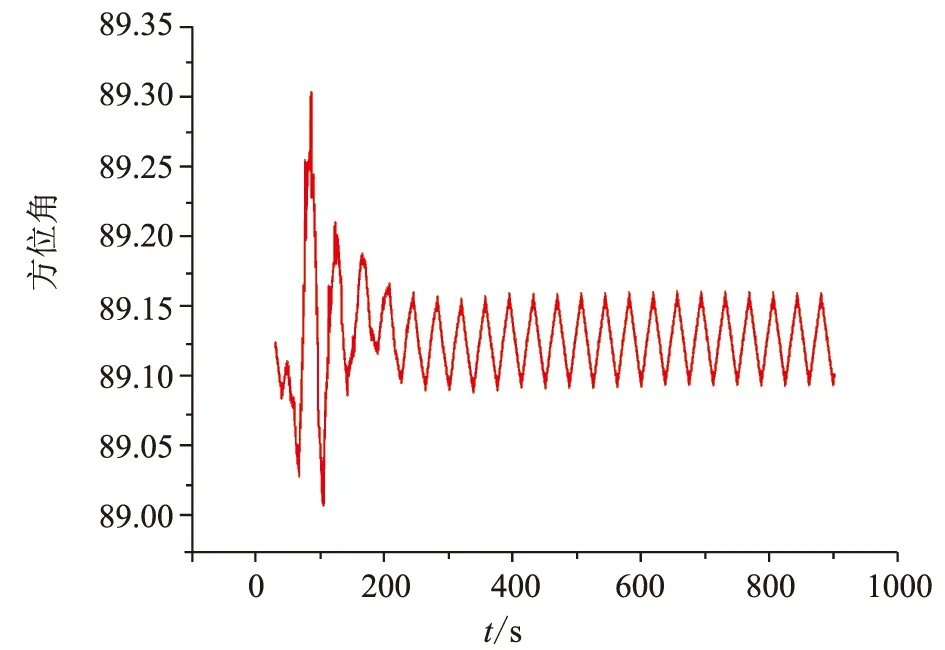
圖1 航向對準曲線Fig.1 The heading of alignment

轉臺方位尋北誤差轉臺方位尋北誤差0°-38.2″180°65.4″45°-49.1″225°27.9″90°11.1″270°-5.8″135°30.4″315°-70.9″
由圖1可見,在單次尋北過程中,航向角中存在周期性的波動,峰峰值可達240″(約0.07°);由表3可見,八位置尋北最大誤差可達71″;樣機的尋北精度遠遠沒有達到預期的精度極限(15″)。因此,需要對影響尋北精度的所有因素進行分析,從而進一步改進設計,逐步逼近尋北極限精度。
2 影響因素分析
通過誤差分析可知,影響尋北精度的主要因素包括以下四種:隨機游走、陀螺刻度系數誤差、擾動速度誤差、航向效應誤差。隨機游走的影響已經分析,下面逐一分析其他三項的影響。
2.1 陀螺刻度系數誤差
陀螺刻度系數誤差會影響角運動測量的精度,特別是在旋轉調制慣導系統中,陀螺刻度系數誤差會造成旋轉調制角速度測量不準,從而影響航向對準和航向角解調輸出精度。
陀螺的刻度系數一般有對稱性誤差和不對稱性誤差兩類。對稱性誤差造成旋轉調制慣導系統中航向角誤差與轉動角度成正比,故單軸旋轉調制慣導系統一般采用繞垂向軸進行正反往復旋轉的調制方案;當IMU繞垂向軸正向旋轉360°時航向角誤差逐漸增大,當轉回0°時減小為0;所以,對稱性誤差造成航向角誤差以旋轉周期上下波動,均值為0;不對稱性誤差會導致IMU轉回0°時航向角誤差不能回到0,當持續往復旋轉時,航向角誤差除了周期性波動外,還會持續增大。
通過測試發現,光纖陀螺的刻度系數主要以對稱性誤差為主,且受溫度變化影響很大,在-40~65℃范圍內可達2×10-3左右;不對稱性誤差很小。對系統進行了溫度試驗,刻度系數誤差與溫度的關系如圖2所示,在溫度為25~45℃的刻度系數變化為5×10-4,可造成航向角解調誤差波動最大可達0.18°,將極大的影響航向對準精度,因此需要對刻度系數誤差進行溫度標定和補償。

圖2 補償前刻度系數與溫度的關系Fig.2 The relationship of scalar and temperature
采用二階溫度模型來擬合補償對稱刻度系數,即設對稱刻度系數K為
K=a1T2+a2T+a3
(2)
式中,T為溫度;a1、a2、a3分別為擬合參數。
圖3為擬合補償后的刻度系數與溫度的關系。可見在溫度為25~45℃范圍內,刻度系數波動小于1×10-5,對應的航向角誤差波動可縮小至13″。

圖3 補償后刻度系數與溫度的關系Fig.3 The relationship of scalar and temperature after compensation
2.2 擾動速度誤差
根據慣導的誤差原理,慣導一般采用觀測北向速度誤差來估計航向角誤差,從而實現航向對準,因此,對準過程中的擾動速度會直接影響航向對準精度或延長對準時間,而消除擾動速度則可提高對準精度并縮短對準時間。航向誤差φu對北向速度δVn的影響可表示為
(3)
式中,g為地球重力加速度;t為時間。由式(3)可知,當對準時間為300s時,若需航向對準精度為15″,則相應的擾動速度應小于0.0006m/s。
造成擾動速度誤差的因素主要包括速度桿臂、軸系晃動、基座穩定度等。其中,速度桿臂為主要影響因素。產生速度桿臂的原因是慣導測量中心與實際轉動中心不重合。圖4為補償桿臂前后的北向速度量測信息,圖5為補償前后的航向對準結果。可見未補償桿臂的速度波動較大,導致航向收斂速度較慢;補償后速度誤差可達0.002m/s,相應的航向對準誤差可達15″。

圖4 桿臂補償前后的北向速度量測值對比Fig.4 The comparison of north velocity after lever arm effect compensation
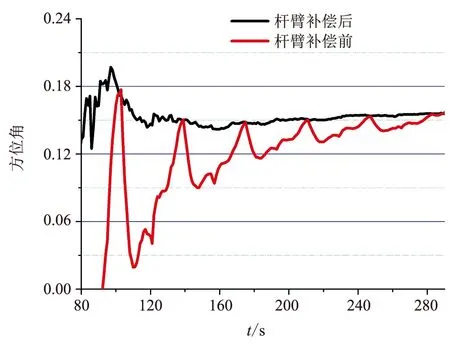
圖5 桿臂補償前后的航向對準結果對比Fig.5 The comparison of heading after lever arm effect compensation
2.3 航向效應
航向效應是指在旋轉調制慣導(或平臺慣導)中,IMU在不同的轉動位置時慣性儀表誤差也隨之改變;當進行旋轉調制時,隨著IMU的轉動,陀螺、加速度計中存在呈周期性變化的分量。由旋轉調制的原理可知,這一類誤差不但不能被調制,反而會因整流效應在機體系表現出常值誤差來,嚴重影響慣導的對準精度。
航向效應的影響因素很多,如外界磁場對系統影響、旋轉機構磁場的影響、系統內部熱場變化的影響。光纖陀螺漂移易受磁場影響,當IMU在不同方向時,外界磁場對系統的切割方式也不相同,陀螺漂移會隨航向不同而變化,是引起旋轉調制光纖慣導航向效應的主要原因。
為減小航向效應,需要深入分析內在的影響因素,有針對性的采取措施。例如,針對磁場的影響,需要在陀螺、IMU、電機等處進行磁屏蔽,消除作用到陀螺上的磁場;針對熱場的影響,需要改進系統熱設計,使系統內部熱量分布盡量均勻,同時選擇對溫度敏感性較小的慣性儀表。
3 系統改進情況
以上述結論為基礎,來分析圖1和表3的結果。圖1中,航向角中存在零均值、周期變化的誤差,主要原因為垂向陀螺存在刻度系數誤差;表3中,在不同的方向,航向對準誤差也不相同,因此,系統中存在航向效應誤差。
針對以上兩種影響因素,在系統上采取了如下措施:一是對電機、陀螺、IMU采取了三層磁屏蔽,地磁場、電機磁場導致的航向效應誤差減小到0.001(°)/h以下;二是對系統進行了溫度標定,陀螺刻度系數誤差減小到1×10-5以下。對改進后的系統再次進行對準試驗,一次試驗的航向角曲線如圖6所示,轉臺八位置尋北的結果如表4所示。

圖6 改進后航向對準曲線Fig.6 The heading of alignment after improvement

尋北位置精度尋北位置精度0°32.1″180°25.4″45°24.3″225°17.9″90°-18.1″270°-5.8″135°10.5″315°-30.9″
對比圖6、表4與圖1、表3可見,改進后航向對準過程中誤差波動小于30″,遠小于改進前的240″;改進后八位置尋北的最大誤差小于35″,比原來的71″減小一半;改進后的對準精度得到了有效的提升。
盡管如此,從圖6和表4可以看出,當前的尋北精度還未達到理論上的極限15″,還有其他的因素在影響對準精度。某次尋北過程中的速度誤差曲線如圖7所示,可見,存在約0.002m/s的擾動速度,通過式(3)計算,認為這是導致對準精度達不到極限的主要因素,需要進一步予以補償;系統目前正在開展這一工作,初步分析認為,三個加速度計組合的尺寸效應誤差、旋轉機構的回轉誤差是造成速度誤差擾動的主要原因。

圖7 對準過程速度誤差結果Fig.7 The velocity error of alignment
4 結論
本文針對旋轉調制光纖陀螺慣導的尋北精度潛力進行了探索研究,研制了試驗樣機進行實際驗證;給出了樣機對準功能調制過程中出現的典型問題,指出了影響對準精度的主要誤差源,并深入分析了影響機理,給出了處理措施,目前5min對準精度達到35″;后續將采取措施處理相關的誤差源以進一步提高精度。
通過上述工作可見,旋轉調制光纖陀螺慣導能夠快速實現高精度,且具有很高的尋北精度潛力;隨著國內光纖陀螺技術的成熟和旋轉調制技術研究的不斷深入,旋轉調制光纖陀螺慣導有望成為新一代高精度慣導的典型方案。
[1] 吳亮華, 鄭辛.高精度激光捷聯慣導行進中方位對準技術[J]. 戰術導彈控制技術,2008, (1): 73-78.
[2] 王世光, 王振軍. 陸用定位定向與尋北儀技術應用現狀[J].戰術導彈控制技術,2010,27(2):14-17.
[3] 嚴恭敏, 嚴衛生, 徐德民. 緯度未知條件下捷聯慣導系統初始對準分析[J].航天控制,2008,26(2):31-37.
[4] K R Britting. Inertial Navigation Systems Analysis[M]. New York: Wieley-Interscience, 1971.
[5] 周斌, 王巍, 蔡春龍. 單軸旋轉式光纖陀螺慣導系統誤差特性研究[J].導航與控制,2012,11(2):1-8.
[6] 劉勇,蔡體箐,芶志平,宋軍.旋轉光纖陀螺捷聯式慣性導航系統[J].壓電與聲光,2009,31(3):315-318.
[7] 周斌, 王巍, 何小飛.旋轉式光纖陀螺慣導系統隨機誤差抑制技術[J].北京航空航天大學學報,2013, 39(9):1204-1207.
Research on North-seeking Precision Limit of Rotation-modulating FOG-SINS
XU Hai-gang,Guo Yuan-jiang,LI Zhi-feng,LI Hai-jun,LIU Chong
(Beijing Automatic Control and Equipment Institute ,Beijing 100074,China)
The premise of rotation-modulating FOG-SINS achieving high accuracy navigation is high precision north-seeking, which is the embodiment of technical advantage. Aiming at the problem of quick and high accuracy north-seeking with rotation-modulating FOG-SINS,we study deeply on the precision limit of north-seeking. Four main influence factors are carded.We analyze deeply the influencing mechanism, error model and magnitude. A validation is made with test prototype. The result shows that though random walk is the final factor to restrict north-seeking precision limit, it will confine the precision a lot if gyroscopes scale factor error, perturbation velocity and heading effect cannot be dealed well. Through taking measures, the north-seeking precision of high accuracy rotation-modulating FOG-SINS can reach 35″ within 5min.
North-seeking precision limit; Rotation-modulation; FOG; Random walk; Heading effect
2015 - 3 - 23;
2015 - 4 - 15。
徐海剛(1979 - ),男 ,高級工程師,主要從事導航、制導與控制方面的研究。
E-mail:buaaxuhg@126.com
U666.1
A
2095-8110(2015)03-0011-05
