艦載武器捷聯慣導系統極地傳遞對準算法
2015-03-11 05:32:24郭元江徐海剛李海軍
導航定位與授時 2015年3期
郭元江,錢 江,徐海剛,李海軍,劉 沖
(1.北京自動化控制設備研究所,北京 100074;2.海裝艦艇部,北京 100084)
?
艦載武器捷聯慣導系統極地傳遞對準算法
郭元江1,錢 江2,徐海剛1,李海軍1,劉 沖1
(1.北京自動化控制設備研究所,北京 100074;2.海裝艦艇部,北京 100084)
針對我國海軍艦載武器捷聯慣導系統的極地作戰環境適應性問題,分析了武器慣導在極區條件遇到的兩大挑戰:極區航向輸出與高精度對準問題。對于極區導航問題,在導航解算中設定不重合于地理系的格網導航坐標系以解決航向輸出難題;對于高精度對準問題,也提出了格網導航系下的“速度+姿態角速率”匹配傳遞對準解決方案。最后通過模擬仿真艦艇極地航行條件,驗證了格網導航以及傳遞對準方法在極地條件的適用性。
捷聯慣導;極地導航;格網導航;傳遞對準
0 引言
目前,我國逐漸開始加入北極資源合作開發中,因此為保護我國在北極活動中的經濟利益,提升在北極事務中的話語權,需開展武器裝備系統極地特性的研究工作,尤其是海軍武器裝備系統。
我國現役海軍艦載武器系統及各分系統設計時,不特別考慮極區環境使用條件。當導彈武器系統工作在極地地區,高緯度、低溫、復雜磁場等工作條件的變化可能會對艦載武器,包括武器導航系統產生影響。例如衛星導航系統由于衛星分布原因,在兩極和高緯度地區的部分區域可能出現衛星覆蓋空洞,這將可能使接收到的衛星幾何分布不理想,導航精度有所降低[1]。
慣導系統具有高自主性、可靠性與隱蔽性等特點,是艦載武器系統中重要的導航設備。目前艦載武器中的捷聯慣導系統在極區環境下同樣存在使用風險,如極點航向輸出、極區高精度對準等問題[2]。因此,國內慣性技術研究所與高校相繼開展極區慣性導航問題研究。航空618所研究了極地飛行的導航算法以及機載武器傳遞對準算法[3-4];西北工業大學、海軍工程大學等院校也對相關技術進行了初步研究。但是,在艦載武器慣導快速對準方面,目前國內尚無相關研究成果。
本文將針對艦載武器極地快速對準問題,提出相應解決方法。其中在第1節中分析極區條件對現有艦載武器慣導系統的影響;在第2節中提出適用于極區條件的格網導航算法;第3節中提出適用于艦載條件的格網導航系下“速度+姿態角速率”匹配傳遞對準方法;第4節中完成導航與傳遞對準仿真分析,以驗證該方案在極地的可適用性。
1 極區條件慣導系統影響分析
極區環境對艦載武器慣導系統的影響包括兩部分:極地條件對慣性導航影響;極地條件對慣導對準影響。本文將對以上兩方面影響分別進行分析。
1.1 慣導導航影響分析
指北方位機械編排方式的導航算法中,數學平臺的角速度指令為:
(1)
采用指北方位機械編排時,在計算給慣性平臺或數學平臺指令的角速度中,需要使用secL項。這一項在高緯度地區會變得很大,尤其在極點該項變為無窮大,使得導航計算溢出。可見,在極地地區受高緯度的影響,現役海軍導彈武器系統中慣導的指北方位機械編排方式會受到制約,導航系統不能正常工作。
1.2 慣導對準影響分析
武器慣導采用的“速度匹配”對準方法通過羅經效應實現方位對準。羅經效應下的航向對準誤差φu為[5]
(2)
式中,εe為慣導系統的等效東向陀螺漂移;ωie為地球自轉角速度;L為緯度。
圖1為陀螺漂移為0.01(°)/h的慣導在緯度為0~75°范圍內對應的“速度匹配”航向對準精度曲線。由圖1可知,在緯度為75°時,“速度匹配”的航向對準誤差為18.9′(3σ),而在緯度為40°時,對準航向誤差僅為8.5′(3σ)。

圖1 不同緯度慣導自對準航向誤差曲線Fig.1 The results of heading alignment at different latitude
可見,隨著慣導所處緯度的升高,其航向對準精度也大幅降低。尤其在高緯度的極地地區,武器慣導采用羅經方式對準的精度會大大下降,而在極點附近甚至無法進行羅經航向對準。另外,“姿態匹配”會使用基準慣導的指北航向信息,但是在極點位置無指北方位角,因此“姿態匹配”傳遞對準方法也無法完全保證在極區的正常工作。所以這將極大影響艦載武器捷聯慣導系統的對準精度,限制艦載武器的使用環境。
2 極地導航算法
指北慣性導航在極區應用的主要問題是測量方向精度下降,甚至在極點無法提供航向信息。因此通過引入虛擬航向來解決航向輸出問題。本文將采用格網方位導航編排方法。
格網導航坐標系(G)以所在地P點處平行于格林尼治子午面的平面作為格網平面,以所在地的水平面作為切平面。格網平面與切平面的交線定義為格網北向,其中格網北向同真北方向的夾角為σ;格網天向同地理天向重合;格網東向在切平面內且與格網北向垂直以構成右手直角坐標系,如圖2所示[6-7]。
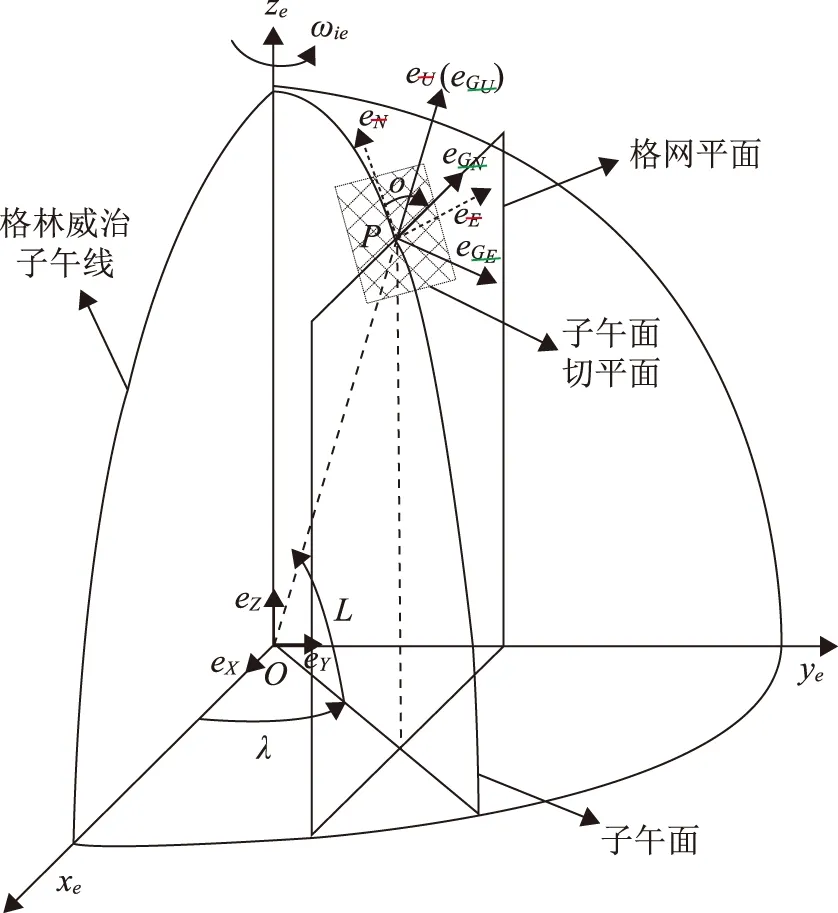
圖2 格網坐標系定義示意圖Fig.2 The schematic diagram of grid coordination

(3)
格網導航算法的姿態更新、速度更新以及位置更新方法與指北導航算法類似,即
(4)

(5)

3 極地傳遞對準算法
目前,導彈武器導航系統的傳遞對準方案包括位置匹配對準、速度匹配對準、加速度匹配對準、姿態匹配對準、角速度匹配對準,以及各種匹配的組合方式對準等。由于在極點附近地理經線收斂,無指北方位角,因此對于武器慣導系統,基于羅經效應的速度匹配無法工作,而姿態匹配中不能提供指北方位角信息,也不可工作。因為格網航向并不會在極點附近奇異導致計算溢出,因此考慮利用主子慣導的格網速度與格網姿態角速度誤差作為量測信息,實現子慣導的傳遞對準。因此本文提出一種“格網速度+姿態角速率”匹配傳遞對準方法。
3.1 系統狀態方程
選取子慣導格網速度誤差δVG,格網姿態誤差φG,加表零偏,陀螺漂移ε,主子慣導間安裝誤差角μ,彈性變形角θf和彈性變形角速率ωf作為狀態量,即
其中,速度誤差方程為


(6)
姿態誤差方程為
(7)
加表零偏誤差方程為
(8)
陀螺漂移誤差方程為

(9)
彈性變形角誤差模型為
(10)
彈性變形角速率誤差模型為
(11)
式中,β=1/τ,τ為三個軸向變形角的相關時間。
利用上述誤差方程可構建卡爾曼濾波系統狀態方程

(12)
3.2 系統量測方程
(1)格網速度量測方程
格網導航系下子慣導速度與基準速度信息之差可作為格網速度量測值,即格網速度的量測方程為
(13)
量測信息為
z1=VsG-VmG
(14)
式中,VsG、VmG分別為子、母慣導的格網速度。
(2)姿態角速率量測方程

(15)
其中,(μ×)為μ的反對稱矩陣,(θf×)為θf的反對稱矩陣。考慮到運載體動態變形角速度的影響,主、子慣導系統測量的角速度之間的關系如下
(16)
可以得到
(17)

(18)
因此
(19)
上述的推導主要考慮的是主、子慣導間由于安裝誤差角、彈性變形角引起的角速度輸出差異,然而實際上,子慣導慣性器件存在誤差(傳遞對準中假設主慣導無誤差),主要是陀螺漂移直接在上述誤差因素基礎上,額外增加了子慣導角速度的輸出。因此,實際的主、子慣導角速度差還要考慮子慣導陀螺漂移的影響,于是
(20)
因此,角速率匹配的量測矩陣為
(21)
量測信息為
(22)
綜上可得,系統的量測方程H為
(23)
量測信息z為
z=[z1z2]T
(24)
4 仿真分析
4.1 導航仿真
為驗證極區格網導航算法的合理性,設定艦艇沿著經線向北穿越極點然后駛出極區的航跡。在仿真過程中設置仿真參數如下:
1)初始方向:正北;
2)載體速度:20節;
3)初始位置:北緯89°,東經116.15326°;
4)到達極點之后,繼續前行,沿著西經63.84674°經線向南航行。
另外,在導航仿真中加入以下誤差項:
1)三軸陀螺漂移0.01(°)/h;
2)三軸加表零偏0.1mg;
3)初始航向誤差為0.05°。

圖3 導航結果Fig.3 The results of grid navigation
圖3為位置誤差、格網速度、水平姿態角和格網航向角的導航仿真結果,可見格網導航算法可正常工作在地球極點處,不會存在計算溢出的問題。由圖3可知,姿態、速度和位置的誤差變化特性與傳統導航算法誤差特性相同,同樣有舒拉周期與地球周期,可見解算導航系的變化并不會對導航誤差特性產生影響。但是格網航向的變化與傳統航向變化不同,它并不存在地球周期,而是發散。這是由于格網航向相當于格網航向與地理航向夾角σ與地理指北航向的疊加,其中格網航向與地理航向夾角σ為
σ=tan-1(-sinLtanλ)
(25)
所以σ誤差與地理位置以及位置誤差相關。因此,雖然地理航向誤差仍然具有地球周期與舒拉周期,但是格網航向誤差會隨緯度誤差變化而逐漸發散。
4.2 對準仿真
為了驗證本文提出的格網“速度+姿態角速率”匹配傳遞對準方法,將在不同緯度條件分別進行仿真。仿真條件為:

圖4 緯度為45°時的安裝誤差角與陀螺漂移估計值Fig.4 The estimate of installation error and drift at N45°
1)緯度:45°和89.99°;
2)艦艇晃動角度:滾轉、航向與俯仰均為0.5°sin(2πt/20);
3)母子慣導安裝誤差角:-0.2°,0.18°,-0.2°;
4)武器慣導陀螺漂移:1.0(°)/h;
5)武器慣導加表零偏:0.1mg。
不同緯度下格網“速度+姿態”匹配的安裝誤差角與陀螺漂移估計值分別如圖4和圖5所示。可見,在不同緯度下估計結果類似,對準效果相當。所以該傳遞對準方法除適用于極地以外,還適用于中低緯度條件。
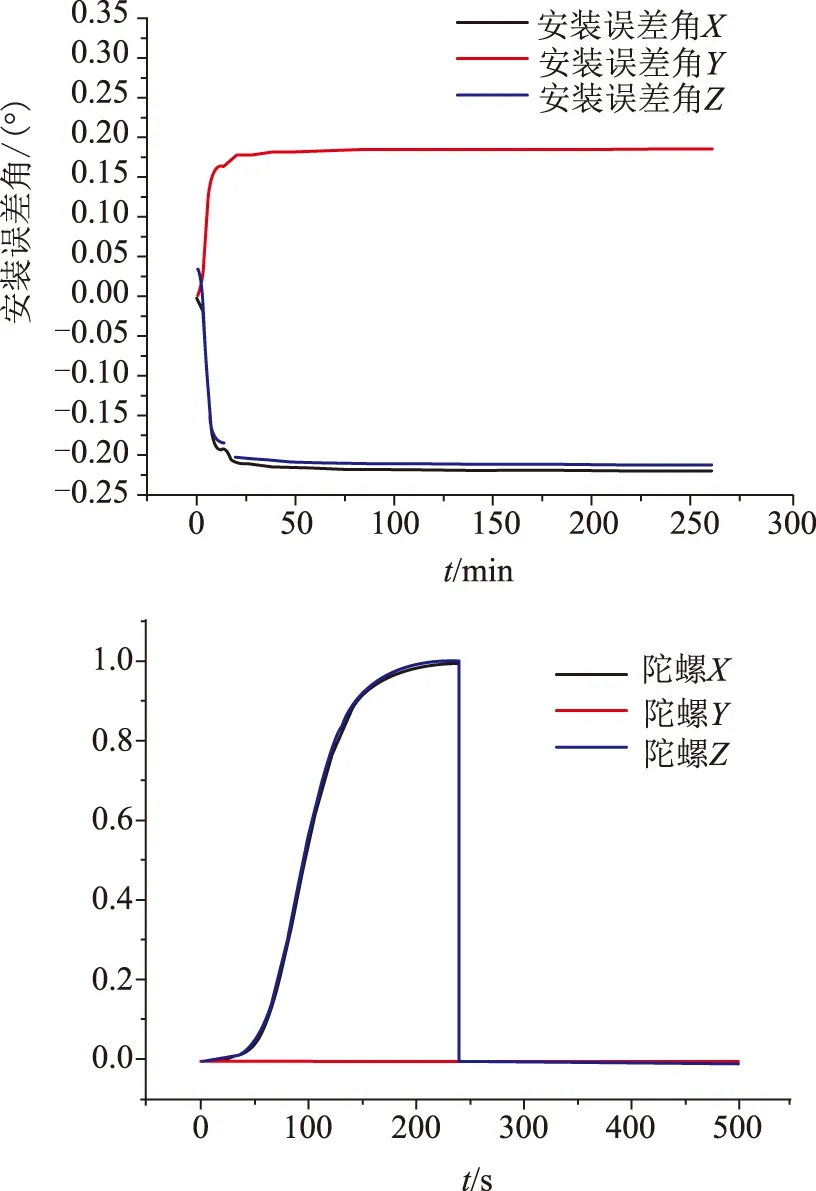
圖5 緯度為89.99°時的安裝誤差角與陀螺漂移估計值Fig.5 The estimate of installation error and drift at N89.99°
5 結論
本文從我國海軍艦載導彈捷聯慣導系統在極地作戰環境適應性出發,分析了艦載武器慣導在極區條件遇到的兩大挑戰:極區航向輸出問題與高精度對準問題。針對極區導航問題,在導航解算中采用格網方位編排方式,通過設定不重合于地理系的導航坐標系以解決航向輸出問題;針對武器慣導對準問題,提出采用格網系下“速度+姿態角速率”匹配傳遞對準方法實現快速、高精度對準。最后通過模擬仿真艦艇極地航行條件,驗證了格網導航以及格網“速度+姿態角速率”匹配對準方法在極地條件的適用性。
[1]GaoXX,HengL,WlterT,etal.Breakingtheice:navigatinginthearctic[C] //.Proc.ofthe24thInternationalTechniacalMeetingoftheSatelliteDivisionoftheInstituteifNavigation, 2011:3767-3772.
[2]IgnagniMB.All-EarthInertialNavigationScheme[J].Navigation, 1972, 19(3) : 209-214.
[3] 周琪,秦永元,嚴恭敏,岳亞洲.極區飛行格網慣性導航算法原理[J].西北工業大學學報,2013.4(31)2:210-217.
[4] 吳楓,秦永元,周琪.機載武器極區傳遞對準算法[J].中國慣性技術學報,2013.4(21)2:141-146.
[5] 秦永元.慣性導航[M].北京:科學出版社,2006.
[6]SmuelHerrick.GridNavigation[J].GeographicReview, 1944, 34(3) : 135-147.
[7]KendallEC.Gyro/GridNavigation[J].JournalofNavigation, 1956, 9(4) : 429-435.
Inertial Navigation System of Ship Weapon Transfer Alignment Algorithm in the Polar Regions
GUO Yuan-jiang1, QIAN Jiang2,XU Hai-gang1, LI Hai-jun1, LIU Chong1
(1.Beijing Institute of Automatic Control Equipment,Beijing 100074,China;2.Naval Equipment Department,Beijing 100084,China)
The strap-down inertial navigation system (INS) for ship weapon faces two problems in the polar regions, and the problems make that the INS for missile of naval ships is disable. At the polar point of the earth, it is difficult to establish the heading. To solve the problem, the grid coordinate frame is presented, and the grid mechanization equations and error equations are derived by using the technique. The rapid and high precision transfer alignment also effects the ability of naval ships missile. In the grid coordinate frame, the velocity and angular rate matching Kalman filter is designed to estimate and correct the INS’s velocity, attitude and inertial sensor errors. Finally, the simulation results show the navigation and transfer alignment algorithm makes the INS for missile of naval ships can be used in the polar rigions.
Strap-down inertial navigation; Polar navigation; Grid navigation; Transfer alignment
2015 - 03 - 10;
2015 - 03 - 10。
郭元江(1986 - ),男,助理工程師,主要從事慣性導航方面的研究。
E-mail: harbor35030324@163.com
U666.1
A
2095-8110(2015)03-0023-06
