基于慣導(dǎo)解算與數(shù)字濾波的艦船振蕩運(yùn)動的分離研究
2015-03-11 03:24:24劉志鵬劉錫祥
艦船電子工程 2015年7期
關(guān)鍵詞:設(shè)計(jì)
趙 玉 宋 清 劉志鵬 劉錫祥
(1.東南大學(xué)儀器科學(xué)與工程學(xué)院 南京 210096)(2.微慣性儀表與先進(jìn)導(dǎo)航技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室 南京 210096)
?
基于慣導(dǎo)解算與數(shù)字濾波的艦船振蕩運(yùn)動的分離研究
趙 玉 宋 清 劉志鵬 劉錫祥
(1.東南大學(xué)儀器科學(xué)與工程學(xué)院 南京 210096)(2.微慣性儀表與先進(jìn)導(dǎo)航技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室 南京 210096)
艦船在風(fēng)浪激勵或(和)其它因素的作用下產(chǎn)生六自由度的隨機(jī)搖蕩運(yùn)動,而搖蕩運(yùn)動將降低艦載武器的打擊精度。針對該問題,論文在捷聯(lián)慣導(dǎo)(SINS)導(dǎo)航解算的基礎(chǔ)上,提出了數(shù)字濾波的艦船振蕩運(yùn)動分離方法,以實(shí)時分離艦船振蕩運(yùn)動,并實(shí)時修正艦載武器的運(yùn)動軌跡,提高其打擊精度。由于慣性導(dǎo)航系統(tǒng)為避免加速度對平臺跟蹤地垂線的干擾而自然形成舒勒振蕩,此振蕩必然會引入艦船運(yùn)動的導(dǎo)航解算結(jié)果中,因此為提取出瞬時運(yùn)動,引入數(shù)字高通濾波器消除舒勒振蕩。論文給出了瞬時運(yùn)動定義及濾波器的實(shí)現(xiàn)方法,仿真結(jié)果證明了該方法的有效性。
SINS; 高通數(shù)字濾波器; 振蕩運(yùn)動; 運(yùn)動分離
Class Number U675
1 引言
船舶在海上航行過程中受到海浪、海風(fēng)以及其它干擾力的影響,將會產(chǎn)生六自由度的復(fù)雜運(yùn)動,對武器控制、艦載機(jī)著艦以及船上設(shè)備和成員等都產(chǎn)生不利影響。尤其在惡劣海況條件下,對艦船海上作業(yè)將產(chǎn)生很大的安全隱患[1~2]。為提高艦載機(jī)的生存能力,可將艦船三軸振蕩運(yùn)動提取出來,及時調(diào)整路線軌跡,減少起降過程中事故的發(fā)生。因此艦船瞬時運(yùn)動分離研究對于保障艦載機(jī)的安全起降等具有重要的意義。
長期以來,廣大學(xué)者從船舶的安全性考慮,對由海浪引起的艦船六自由度運(yùn)動進(jìn)行了廣泛的研究。目前關(guān)于艦船搖擺運(yùn)動大多采用慣性測量方法,相對較成熟。與搖擺運(yùn)動的慣性測量方法相比,振蕩運(yùn)動的研究進(jìn)展比較緩慢[2~5]。本文針對此問題,利用捷聯(lián)慣導(dǎo)系統(tǒng)對艦船航行運(yùn)動進(jìn)行導(dǎo)航計(jì)算,并設(shè)計(jì)數(shù)字高通濾波器對艦船三軸振蕩運(yùn)動信息進(jìn)行提取并加以分析。
2 艦船運(yùn)動特性及瞬時運(yùn)動坐標(biāo)系定義
2.1 艦船運(yùn)動特性
艦船運(yùn)動分析如圖1所示。由于艦船體型巨大,出海時間比較漫長,航行線運(yùn)動近似為直線運(yùn)動,其轉(zhuǎn)向、加速、減速運(yùn)動因艦船本身結(jié)構(gòu)及動力性能需要較長時間。因此航行線運(yùn)動屬于低頻運(yùn)動,而隨波浪被動運(yùn)動的搖蕩運(yùn)動相對航行主運(yùn)動周期較短,屬于高頻運(yùn)動[6]。
將艦船的橫搖、縱搖、艏搖以及橫蕩、縱蕩、垂蕩六自由度的運(yùn)動稱為艦船的瞬時運(yùn)動。

圖1 艦船運(yùn)動特性
2.2 瞬時運(yùn)動坐標(biāo)系定義
為了從艦船的綜合運(yùn)動中將瞬時運(yùn)動提取出來,首先給出瞬時運(yùn)動坐標(biāo)系(半固定坐標(biāo)系)的定義[7],如圖2所示,O為船體重心,OE、ON為水平面上的東向軸和北向軸,OXdYdZd(右前上)為船體坐標(biāo)系,OXj、OYj分別為載體坐標(biāo)系OXd和OYd在水平面的投影,OZj軸垂直向上與OXj和OYj構(gòu)成右手系。半固定坐標(biāo)系的定義使得線運(yùn)動與角運(yùn)動分離開來,因此可直觀的表示出艦船的三軸振蕩運(yùn)動。

圖2 瞬時運(yùn)動坐標(biāo)系

(1)
其中ψ為航向角。
3 捷聯(lián)慣導(dǎo)解算原理


圖3 捷聯(lián)式慣導(dǎo)系統(tǒng)原理圖
3.1 姿態(tài)更新計(jì)算

(2)
由于四元數(shù)Q中包含了所有的姿態(tài)信息,從四元數(shù)更新獲得的姿態(tài)矩陣中提取實(shí)時姿態(tài)角,公式如下所示
(3)

3.2 速度更新計(jì)算

(4)
展開成分量形式為
(5)
(6)
(7)

3.3 位置更新計(jì)算
經(jīng)、緯度的計(jì)算由上一時刻的經(jīng)緯度值以及速度信息獲取,公式如下
(8)
微分方程為
(9)
其中,λ為當(dāng)?shù)亟?jīng)度,λ(0),L(0)為經(jīng)緯度的初始值。
3.4 導(dǎo)航數(shù)據(jù)中的頻率組成分析
艦船運(yùn)動包括航行主運(yùn)動和由海浪等周圍環(huán)境作用引起的搖蕩運(yùn)動,顯然通過慣導(dǎo)解算得到的艦船運(yùn)動數(shù)據(jù)中包含有上述兩種頻率組成,但同時還包括有舒勒振蕩、傅科振蕩以及地球振蕩三種頻率。其中傅科振蕩與地球振蕩周期較長,分別為24h/sinL與24h,在有限的導(dǎo)航時間內(nèi),可以忽略該頻率組成,認(rèn)為其為常值。
舒勒在建立地球鉛垂線時發(fā)現(xiàn),如果地面上的數(shù)學(xué)擺或物理擺具有周期約84.4min鐘的振蕩運(yùn)動,不論加速度如何,擺將始終保持鉛垂位置,滿足舒勒調(diào)諧的條件是擺長為地球半徑,這樣的單擺是不可能實(shí)現(xiàn)的,但是慣導(dǎo)系統(tǒng)用陀螺儀和加速度計(jì)卻很容易實(shí)現(xiàn)。當(dāng)陀螺羅經(jīng)的無阻尼振蕩周期為84.4min時,羅經(jīng)的指北精度將不受外界干擾加速度的影響。慣性導(dǎo)航系統(tǒng)為避免加速度對平臺跟蹤地垂線的干擾,自然形成舒勒振蕩,該振蕩必然會引入艦船運(yùn)動的慣導(dǎo)解算結(jié)果中。
單軸慣性平臺方框圖如圖4所示。

圖4 單軸慣性平臺動力學(xué)簡化方塊圖
綜上,為得到艦船瞬時振蕩運(yùn)動,通過引入數(shù)字濾波器來消除84.4min的舒勒振蕩運(yùn)動和艦船的低頻主航行運(yùn)動。
4 數(shù)字濾波器的設(shè)計(jì)
數(shù)字濾波器按照單位沖激序列的響應(yīng)特性可分為無限沖擊響應(yīng)IIR數(shù)字濾波器和有限沖擊響應(yīng)FIR數(shù)字濾波器。
FIR數(shù)字濾波器的輸出只與當(dāng)前的輸入和過去的有限個輸入有關(guān),而與過去的輸出無關(guān),其差分方程為
(10)
其中y(n)為濾波器的輸出,x(n-r)為當(dāng)前和過去的有限個輸入,ar為濾波器系數(shù)。對上式通過Z變換可得到FIR數(shù)字濾波器的傳遞函數(shù)H(z):
(11)
IIR數(shù)字濾波器的輸出不僅取決于過去和現(xiàn)在的輸入,而且也取決于過去的輸出,差分方程表示為
(12)
其中,ar和bk為IIR數(shù)字濾波器系數(shù),y(n-k)為過去n-k時刻的輸出。對上述差分方程進(jìn)行Z變換可得IIR數(shù)字濾波器的傳遞函數(shù)如下:
(13)
4.1 FIR與IIR數(shù)字濾波器的比較
FIR數(shù)字濾波器的傳遞函數(shù)只有零點(diǎn),極點(diǎn)全部在原點(diǎn),因此濾波器是永遠(yuǎn)穩(wěn)定的,一般采取非遞歸途徑實(shí)現(xiàn)。對于IIR數(shù)字濾波器傳遞函數(shù)既有零點(diǎn)又有極點(diǎn),濾波器不一定穩(wěn)定,一般采用遞歸方法來實(shí)現(xiàn)[9~11]。從性能上來說,IIR濾波器可以用較少的階數(shù)達(dá)到同樣的濾波效果,運(yùn)算次數(shù)少,所用存儲單元少,比較高效經(jīng)濟(jì),但是效率越高非線性也越嚴(yán)重。而FIR濾波器可以得到嚴(yán)格的線性相位,但是需要較高的階數(shù),要得到滿意的性能通常需要一百多個系數(shù),需要較多的存儲器和運(yùn)算。
兩種濾波器各有優(yōu)缺點(diǎn),從使用要求來看,若對相位要求不敏感,選IIR濾波器較為合適。對于由海洋環(huán)境引起的艦船瞬時運(yùn)動,考慮FIR濾波器延遲時間比較長,不能滿足實(shí)時性要求,因此采用IIR數(shù)字濾波器進(jìn)行濾波。
4.2 IIR數(shù)字濾波器的設(shè)計(jì)
對于IIR數(shù)字濾波器設(shè)計(jì)方法有兩類:一是先設(shè)計(jì)出相應(yīng)的模擬濾波器,得到傳遞函數(shù)Ha(s),然后將Ha(s)按一定的方法轉(zhuǎn)換成數(shù)字濾波器的系統(tǒng)函數(shù)H(z),具體設(shè)計(jì)過程可參考文獻(xiàn)[10]。另一種設(shè)計(jì)方法是直接在時域或頻域上進(jìn)行設(shè)計(jì),這種方法要解聯(lián)立方程,一般要借助計(jì)算機(jī)來實(shí)現(xiàn)。
基于Matlab的IIR數(shù)字濾波器的設(shè)計(jì)有三種方法:模擬濾波器設(shè)計(jì)法(經(jīng)典設(shè)計(jì)法)、直接設(shè)計(jì)法和最大平滑法。本文介紹經(jīng)典離散化的設(shè)計(jì)方法,設(shè)濾波器技術(shù)指標(biāo)為:通帶頻率fp,阻帶頻率fs,通帶最大衰減ap,阻帶最小衰減as,采樣頻率Fs。
%****IIR數(shù)字高通濾波器設(shè)計(jì)****
%數(shù)字域指標(biāo)變換成模擬域指標(biāo)
wp = 2*pi*fp/Fs;
ws = 2*pi*fs/Fs;
%數(shù)字域頻域預(yù)畸變
wp1 = 2*Fs*tan(wp/2);
wp2 = 2*Fs*tan(ws/2);
%模擬濾波器的設(shè)計(jì)
%創(chuàng)建巴特沃斯IIR型低通濾波器原型
[N,Wn] = buttord(wp1,ws1,ap,as,’s’);
[z,p,k] = buttap(N);
%由零極點(diǎn)轉(zhuǎn)換為傳遞函數(shù)形式
[Bap,Aap] = zp2tf(z,p,k);
%模擬低通變高通
[Bbs,Abs] = lp2hp(Bap,Aap,Wn);
%**模擬濾波器變換為數(shù)字濾波器**
%雙線性變換法設(shè)計(jì)數(shù)字濾波器
[b,a] = bilinear(Bbs,Abs,Fs);
5 仿真驗(yàn)證
首先設(shè)定船體的運(yùn)動軌跡,其次通過以上章節(jié)介紹的算法及公式反推出慣性儀表的輸出,疊加誤差后模擬慣性儀表的實(shí)際輸出值,然后帶入公式進(jìn)行導(dǎo)航運(yùn)算,求得速度、姿態(tài)等船體信息。
艦船在海上運(yùn)動時,會受到海浪的沖擊產(chǎn)生振蕩,假設(shè)艦船的水平角和航向角均以一定的擺幅和周期作簡諧振動,并且艦船按一定的航向作等速航行。因此設(shè)計(jì)瞬時運(yùn)動速度模型為
Vi=Aisin(wit+φi)
(14)
式中Vi為瞬時速度,Ai為振蕩速度幅值,wi為振蕩頻率,φi為初始相位。
5.1 仿真條件設(shè)置
艦船運(yùn)動初始航向角φ為45°,常值航速為5m/s,瞬時運(yùn)動周期為7s,幅值1.88m/s,初始相位為零。
由于舒勒振蕩周期為84.4min(頻率約0.0002Hz),艦船隨波浪的被動運(yùn)動周期大約為十幾秒左右。因此高通濾波器的通帶頻率fp<0.1Hz,阻帶頻率fs>0.0002Hz,設(shè)通帶最大衰減ap=3dB,阻帶最小衰減as=30dB。采樣周期Ts的設(shè)置使得模擬域通帶頻率wp和阻帶頻率ws的值位于(0,1)區(qū)間。因此對濾波器設(shè)計(jì)參數(shù)為:fp=0.08Hz,fs=0.04Hz,ap=3dB,as=30dB,Ts=1s。
5.2 仿真結(jié)果及分析
艦船的振蕩運(yùn)動有三個,為了節(jié)約篇幅,此處僅對橫蕩運(yùn)動進(jìn)行分析,縱蕩與垂蕩可進(jìn)行類似的分析。
對橫蕩速度的仿真結(jié)果和頻譜分析分別如圖5和圖6所示,圖5中的數(shù)據(jù)曲線為通過慣導(dǎo)解算求得的艦船在瞬時運(yùn)動坐標(biāo)系下的橫蕩速度值,仿真時間為3h。從圖中可明顯看出仿真結(jié)果中包含了慣導(dǎo)解算帶來的84.4min的舒勒振蕩。

圖5 慣導(dǎo)解算橫蕩速度

圖6 濾波前橫蕩速度的頻譜分析
為得到瞬時運(yùn)動值,用數(shù)字高通濾波器對其進(jìn)行濾波得到結(jié)果如圖7所示。從濾波結(jié)果及頻譜分析(圖8)中可看出濾波后成功將舒勒振蕩濾除掉,得到頻率為0.143Hz(周期為7秒)的橫蕩速度的瞬時運(yùn)動波形。

圖7 濾波后橫蕩速度
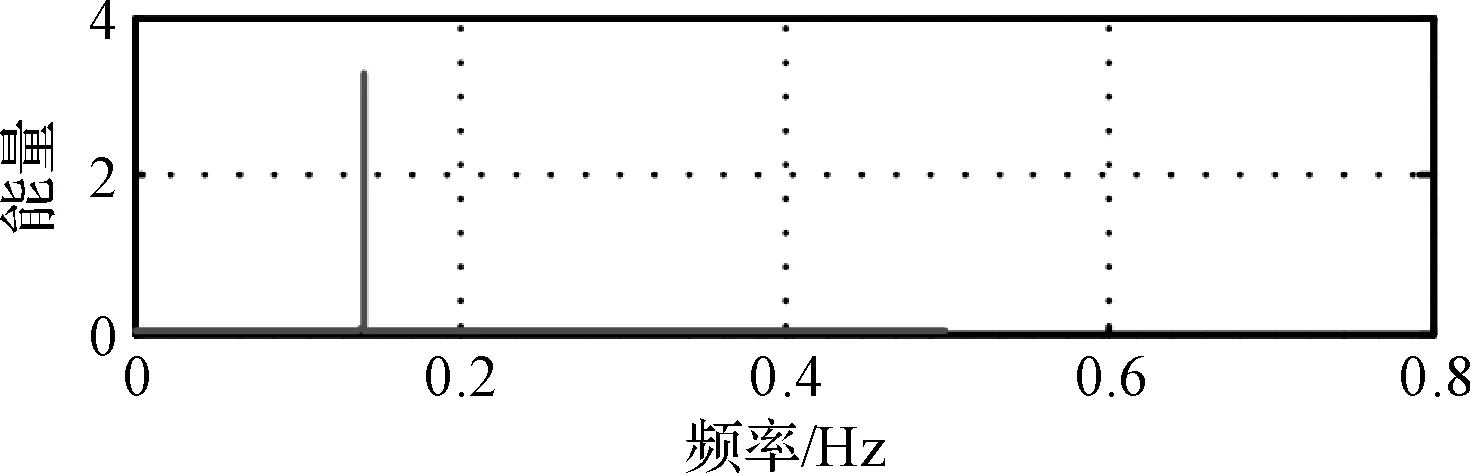
圖8 濾波后橫蕩速度的頻譜分析
6 結(jié)語
本文介紹了艦船運(yùn)動特性、捷聯(lián)慣性導(dǎo)航系統(tǒng)的基本原理、慣導(dǎo)解算用到的基本方程和慣導(dǎo)系統(tǒng)引入的舒勒振蕩原理,以及高通數(shù)字濾波器的設(shè)計(jì)。由于篇幅限制,主要對橫蕩運(yùn)動進(jìn)行了分析,通過瞬時坐標(biāo)系的轉(zhuǎn)換以及數(shù)字濾波器的應(yīng)用,成功將橫蕩速度從捷聯(lián)慣導(dǎo)解算的艦船運(yùn)動中分離出來。另外本文對于艦船運(yùn)動模型的設(shè)定比較理想化,與真實(shí)環(huán)境還是有一定差距。
[1] 魏家慶.航母運(yùn)動態(tài)勢分析方法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2012.
[2] 徐琳琳.船舶運(yùn)動仿真及建模預(yù)報(bào)研究[D].哈爾濱:哈爾濱工程大學(xué),2007.
[3] 鄒建武,祝明波,董巍.海浪建模方法綜述[J].艦船電子工程,2010,30(11):10-13.
[4] HAO Y L, XIONG Z L, GAO W, et al. Study of strapdown inertial navigation integration algorithms[C]//Proceedings of the 2004 International Conference on Intelligent Mechatronocs and Automation,2010,30(11),10-13USA,2004:751-754.
[5] TIRERTON D H, WESTON J L. Strapdown inertial navigation technology[M]. 2nd ed. Reston: Co-published by the American institute of Aeronautics and Astronautics and the Institution of Electrical Engineers,2004:453-456.
[6] 龔晶.艦船瞬時線運(yùn)動參數(shù)慣性測量技術(shù)研究[D].哈爾濱:哈爾濱工程大學(xué),2010.
[7] 孫偉,孫楓.基于慣導(dǎo)解算的艦船升沉測量技術(shù)[J].儀器儀表學(xué)報(bào),2012,33(1):167-172.
[8] 秦永元.慣性導(dǎo)航.科學(xué)出版社[M].北京:北京科學(xué)出版社,2006:203-204.
[9] CHO S Y, KIM B D. Adaptive IIR/FIR fusion filter and its application to the INS/GPS integrated system[J]. Autimationca,2008,44(8):2040-2047.
[10] 陳江良,陸志東.基于MATLAB的數(shù)字濾波器設(shè)計(jì)及其在捷聯(lián)慣導(dǎo)系統(tǒng)中的應(yīng)用[J].中國慣性技術(shù)學(xué)報(bào),2005,13(6):10-12.
[11] 嚴(yán)慧,于繼明.基于MATLAB的IIR數(shù)字濾波器設(shè)計(jì)[J].軟件導(dǎo)刊,2013,12(1):110-113.
A Separation Method for Ship Swaying Motion Based on SINS Navigation Solution and Digital Filter
ZHAO Yu SONG Qing LIU Zhipeng LIU Xixiang
(1. Key Laboratory of Micro-inertial Instrument and Advanced Navigation Technology, Ministry of Education, Nanjing 210096) (2. School of Instrument Science & Engineering, Southeast University, Nanjing 210096)
Ship swaying motion in six degrees caused by the effects of marine environment, such as the wind, will significantly decrease the accuracy of on-board weapon or other devices. Aiming to solve this problem, a new separation method based on Strapdown Inertial Navigation System(SINS) solution and digital filter is detailedly designed, which can separate the sawing motion from navigation motion effectively and generate compensation information for on-board device, thus increase the accuracy. In this paper, the definition about instantaneous movement and its coordinated frame are described, and the high-pass filter is introduced to remove Schuler oscillation which produced from the inertial navigation calculation in navigation results. The high-pass filter is designed and achieved, and simulation results indicate that with SINS solution and high-pass filter, the oscillatory motion can be effectively separated.
SINS, high-pass filter, oscillatory motion, movement separation
2015年1月5日,
2015年2月13日 基金項(xiàng)目:國家自然科學(xué)基金(編號:61273056)資助。 作者簡介:趙玉,女,碩士研究生,研究方向:慣性導(dǎo)航與組合導(dǎo)航。宋清,女,碩士研究生,研究方向:慣性導(dǎo)航與組合導(dǎo)航。劉志鵬,男,碩士研究生,研究方向:慣性導(dǎo)航與組合導(dǎo)航。劉錫祥,男,副教授,博士生導(dǎo)師,研究方向:慣性導(dǎo)航與組合導(dǎo)航。
U675
10.3969/j.issn1672-9730.2015.07.021
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04