四旋翼無人機在柑橘園巡檢系統中的應用
2015-03-11 07:32:55ApplicationofQuadrotorUAVintheInspectionSystemofCitrusOrchard
自動化儀表 2015年7期
關鍵詞:系統
Application of Quadrotor UAV in the Inspection System of Citrus Orchard
高 緒 謝菊芳 胡 東 邱善生
(西南大學工程技術學院,重慶 400715)
四旋翼無人機在柑橘園巡檢系統中的應用
Application of Quadrotor UAV in the Inspection System of Citrus Orchard
高緒謝菊芳胡東邱善生
(西南大學工程技術學院,重慶400715)
摘要:針對現階段西南地區大面積柑橘園巡檢的應用需求,為了提高柑橘園巡檢管理效率,降低勞力,提出了一種巡檢系統。系統利用四旋翼無人機為載體,搭載視頻采集裝置進行航拍巡視、搜索、采集柑橘園區的視頻圖像資料,完成巡檢任務。系統上位機軟件在Visual studio 2013環境下開發,系統硬件為四旋翼無人機搭載拍攝設備。通過上位機軟件,系統實現了對柑橘園巡檢情況的實時觀看、定點捕捉以及對四旋翼無人機飛行姿態、高度和拍攝角度的控制。測試表明,該巡檢系統操作簡單,提高了對柑橘園的巡檢效率,節省了勞力,且系統運行穩定、可靠,適用于西南地區大中型柑橘園區的巡檢工作。
關鍵詞:四旋翼無人機VS2013姿態控制視頻采集巡檢系統
Abstract:Aiming at the application demands for inspecting large citrus orchards in southwest region, in order to improve the management efficiency and reduce the labor input, the strategy using quadrotor UAV as the carrier is proposed. The UAV is equipped with video collection device for aerial shooting, inspecting, searching, and collecting video images of the citrus orchard, thus completing the tasks of inspection. The software of host computer is developed under Visual Studio 2013 environment; the hardware of system is composed of the shooting equipment on the UAV. Through the software of host computer, the functions of real time watching, site capturing, and controlling the flight attitude, height, shooting angle of quadrotor UAV can be implemented. The tests show that the operation of system is simple; the system runs stably and reliably, it enhances the efficiency of inspection and saves labor, so the system is suitable for the inspection of large and medium sized citrus orchards in southwest region of China.
Keywords:Quadrotor UAVVS2013Attitude controlVideo captureInspection system
0引言
近年來,我國已經躍居為柑橘世界的第一大國,并將長期保持領先地位[1]。其中,重慶、江西、湖北、湖南和四川5省的柑橘種植產量占全國總產量的50%左右,柑橘產業已經成為我國南方主產區農村經濟的一大支柱產業,為促進農民增收、擴大城鄉居民就業和改善生態環境作出了積極貢獻[2]。但是我國柑橘生產的土地生產率低于世界平均水平,具體表現為單產水平較低,其中一個最主要的原因就是柑橘園生產經營管理方式粗放[3]。
目前,西南地區柑橘園區巡檢方式主要依靠人工巡檢。2008年,湖南、湖北、重慶等西南5省市的柑橘園區種植面積已經達到120萬km2,占全國柑橘園區總面積的62%[2]。隨著種植園區的集中化、規模化以及西南地區柑橘園區種植自然條件的制約,人工對柑橘園區進行巡檢存在著諸多問題。由于利用智能巡檢裝置進行巡視、檢查具有工作效率高、省時節能的效益,因此該裝置在各個巡檢領域得到廣泛應用。國內電力部門在智能巡檢方面進行了優化設計,設計了變電站、輸電線路、大中型電力器件等智能巡檢裝置[4-6],其中輸電線路巡檢方面開發了一些智能化巡檢無人機運動控制系統或裝置[7-9]。但是西南地區大部分柑橘園地處偏遠山區,無電力設施。因成本、供電限制、不易操作等原因[10],不能將現有的智能巡檢裝置照搬到柑橘園區的巡檢任務中。
為此,本文設計了一套基于四旋翼無人機的柑橘園巡檢系統,其中包括四旋翼無人機的硬件系統及上位機軟件系統。用戶只需要在上位機軟件界面上發送控制指令,就可以對四旋翼無人機的姿態、高度和拍攝角度進行控制。該系統可以對柑橘園區的灌溉系統、園區鳥害、雜草覆蓋、人工破壞等園區狀況進行巡檢,操作簡單方便,巡檢效率高,果農可以針對巡檢情況做出及時處理。
1巡檢系統結構
四旋翼無人機巡檢系統結構如圖1所示。

圖1 四旋翼無人機巡檢系統結構圖
四旋翼無人機巡檢系統由四旋翼無人機機架、姿態檢測模塊、氣壓檢測模塊、電機驅動模塊、視頻采集模塊、聚合物鋰電池、無線模塊和PC上位機組成。系統通過PC上位機發送控制指令,控制無人機的飛行姿態,并且通過視頻采集模塊,采集視頻數據傳送到上位機,在上位機軟件界面上顯示無人機姿態數據及其巡檢視頻的實時預覽或保存。
2系統下位機設計
2.1 下位機硬件設計
四旋翼無人機巡檢系統硬件設計部分主要分成無人機機體及其動力系統、傳感器數據采集系統、巡檢設備控制系統、無線通信系統4個部分。
2.1.1機體及其動力系統
四旋翼無人機機體采用X型無人機架,帶有4片正反槳葉的旋翼。與傳統的單旋翼直升機不同,四旋翼無人機可以通過自身正反旋翼上產生的氣動力抵消偏航扭矩。通過對4個旋翼電機的轉速控制,實現對四旋翼無人機定點懸停、垂直升降等飛行姿態的控制。四旋翼無人機機體配備U型支架,給攝像裝置留有足夠的安裝空間,保證無人機平穩著落。無人機機架采用碳纖維材料,動力系統由新西達XXD2208/1800KV無刷直流電機、電子調速器、9.8英寸(1英寸=25.4 mm)槳葉組成。為了能使無人機完成長時巡檢任務,動力系統配備高性能的鋰聚合物電池,充分滿足電機的轉速要求。
2.1.2傳感器數據采集系統
傳感器數據采集系統主要分成姿態檢測傳感器和氣壓檢測傳感器2部分,兩者與主控芯片間均采用I2C通信方式。姿態檢測傳感器采用MPU-9150,該模塊集成了三軸加速度計、三軸陀螺儀和三軸電子羅盤,滿足無人機姿態解算要求。氣壓檢測傳感器采用MS5611。該模塊通過檢測無人機當前狀態的氣壓值,通過氣壓值與海拔高度之間的轉換關系實現對無人機飛行高度的測量。
2.1.3巡檢設備控制系統
巡檢設備控制系統主要由舵機控制支架和天視通TH38R視頻采集模塊2部分組成。天視通TH38R視頻采集模塊安裝在舵機控制支架上,通過減震裝置懸掛在無人機機體上。舵機連接旋轉支架可以實現180°方向旋轉,在四旋翼無人機俯仰、偏航等姿態變化時,對柑橘園區環境進行多角度拍攝。針對不同的巡檢地點圖像質量要求不同,園區工作人員可以在上位機界面上對畫面成像的主流碼進行選擇(分成三個層次1 280×720、640×360和320×180),滿足不同巡檢視頻圖像的采集要求。
2.1.4無線通信系統
柑橘園區巡檢系統的主要目的是采集園區內灌溉系統、園區鳥害、低溫凍害、雜草覆蓋等園區情況的影像資料,為人工管理柑橘園區提供前期數據。考慮獲取數據的時效性、可靠性和安全性的要求,采用無線通信模塊HLK-RM04配備上位機軟件,實現采集視頻圖像的實時預覽、飛行姿態控制和攝像裝置拍攝角度的調節。
無線控制模塊是連接上位機軟件與下位機之間數據通信的橋梁,負責將上位機的控制指令傳送給下位機控制系統和將巡檢園區拍攝的視頻回傳到上位機界面。系統采用海陵電子公司生產的HLK-RM04無線模塊。該模塊能夠實現串口、以太網和WiFi這3個接口間任意透明傳輸;通過外接高增益無線天線,保證無線信號遠距離傳輸。主控芯片和天視通TH38R視頻采集模塊分別通過UART和以太網的LAN接口與無線模塊進行握手連接,無線模塊通過WiFi與上位機軟件進行數據通信。
無線模塊工作方式如圖2所示。

圖2 無線模塊工作方式連接圖
2.2 下位機軟件設計
四旋翼無人機巡檢系統的下位機軟件設計,首先對MCU時鐘與內部存儲空間進行初始化;然后定時讀取無線控制信號數據,將所獲得的無線控制信號和傳感器信號做比較,計算出偏差;最后通過PID控制器得到電機的控制量。下位機軟件設計主程序流程圖如圖3所示。最主要的流程就是實現對四旋翼無人機巡檢系統的數據融合和姿態解算。

圖3 下位機軟件主程序流程圖
2.2.1數據融合
在慣性測量系統中,加速度測量是重力方向,在沒有外力的情況下能夠準確輸出橫滾/偏航兩軸的姿態角,但是MEMS技術檢測慣性力和重力本質不同,所以加速度傳感器的輸出將不準確[11]。陀螺儀輸出的角速度是瞬間輸出量,需要對角速度積分才能得到角度值,所以傳感器的數據積分累積誤差會越來越大。因此,需要用加速度傳感器對陀螺儀的數據進行不斷的修正,融合兩者的姿態數據才能準確反映當前無人機的飛行姿態。
四旋翼無人機姿態解算采用互補濾波的方法對數據進行融合。互補濾波融合算法以加速度和角速度的測量值作為輸入,將加速度數據經過低通濾波器,濾除短期內加速度數據的波動量。陀螺儀測量得到的角速度是瞬時值,對其積分得到的角度變化量需要經過高通濾波器處理掉高頻分量[12]。互補濾波融合算法的系統框圖如圖4所示。
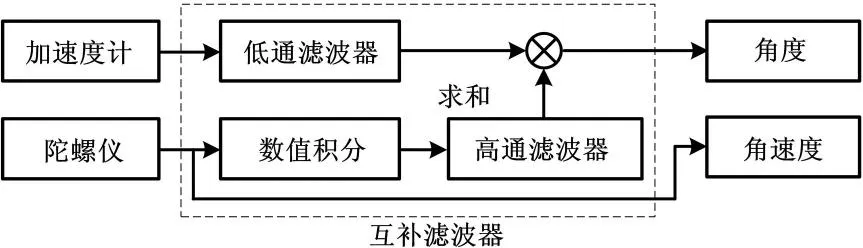
圖4 互補濾波融合算法系統框圖
2.2.2姿態解算
采用姿態檢測傳感器MPU9150采集的三軸陀螺儀、三軸加速度計和三軸磁力計的數據如圖5所示。
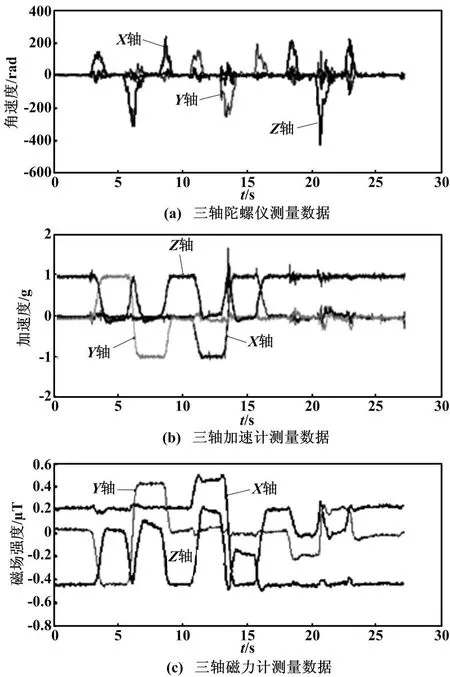
圖5 姿態檢測模塊測量數據
姿態解算是整個下位機軟件控制系統的核心。四旋翼無人機的姿態主要由俯仰、橫滾和偏航3個角度來確定。空間中描述四旋翼無人機的飛行姿態需要定義參考坐標系和載體坐標系,四旋翼無人機在運動的過程中,參考坐標系保持不變,載體坐標系相對于參考坐標系可以通過多次旋轉運動得到[13]。經過互補濾波之后輸出的角度和角速度值,通過姿態解算算法得到控制無人機的偏航、橫滾和俯仰3個角度值。
姿態檢測傳感器采集到的姿態數據都是在載體坐標系中。在四旋翼無人機在進行姿態解算時,需要將載體坐標系下測的數據轉換到導航坐標系下,然后再進行姿態解算,本文利用方向余弦陣完成載體坐標系到導航坐標系的轉換。方向余弦矩陣如式(1)所示。通過方向余弦矩陣可以得到3個姿態角即偏航角(ψ)、俯仰角(φ)和橫滾角(θ),如式(2)所示[14-15]。
上位機軟件通過無線信號發送無人機期待的飛行姿態控制信號,同時讀取當前姿態傳感器數據;經過互補濾波,解算出當前無人機姿態,計算期待姿態和當前姿態的差值。通過PID控制器計算出電機控制量,以PWM占空比形式輸出,驅動旋翼電機,最終完成無人機姿態控制。
(1)
(2)
3系統上位機軟件設計
系統上位機軟件與下位機之間通過無線通信模塊HLK-RM04進行數據通信。上位機軟件是在VS2013的C#開發環境下設計的窗體應用程序,軟件界面主要由登錄端、無人機控制端和數據端3部分組成。
登錄端主要用來連接無線模塊及其攝像裝置,主機與客戶端要獲得連接通信,要求兩者都必須在同一個無線網絡中。在程序設計中,創建一個接收“Socket”,用來與主機無線模塊進行通信,通過“Receive”函數接收指定IP地址和端口號的主機傳送來的數據,調用“Socket”的“Send”方法,向主機無線模塊發送控制指令[16];控制端主要是對四旋翼無人機的飛行姿態進行控制和對視頻采集模塊的鏡頭角度進行調節。四旋翼無人機姿態是由界面中的“上、下、左旋、右旋、前、后、左、右”幾個按鍵控制;數據端是用來顯示發送出去或接收到的數據,發送區顯示上位機準備發送給下位機的命令或信息,接收區顯示下位機返回的信息。上位機界面添加了一個“PictureBox”控件,將其“Sizemode”屬性設置成“Autosize”,用來顯示視頻模塊采集到的視頻數據。程序中調用了“EmguCV”函數,將攝像頭采集的視頻在界面上全屏顯示[17]。
4巡檢系統測試
4.1 通信測試
打開無線模塊供電開關,上位機通過無線模塊的無線網絡“HLK-RM04”進行數據通信,在上位機軟件界面上的登錄端,對下位機IP地址進行設置,設置其IP地址為“196.168.16.254”,端口號為“8080”,點擊連接,實現上位機軟件與下位機連接通信。同樣通過登錄端,將攝像頭與無線模塊通信的IP地址設為“196.168.16.123”,端口號設為“8091”,實現攝像頭與上位機軟件間數據通信。連接成功后,在發送區會顯示“連接成功”的信息提示。2013年9月,在西南大學工程技術學院機器人實驗室對四旋翼無人機巡檢系統進行上位機軟件與無線模塊、攝像裝置進行通信測試,并且對視頻圖像的采集進行測試。
4.2 姿態測試
登錄端與下位機軟件間握手連接成功后,在控制端上發送控制指令,通過下位機軟件對數據進行處理,轉換成對4個旋翼電機轉速的控制,最終完成無人機飛行姿態改變。通過控制端軟件界面上設置的控制指令,可以實現四旋翼無人機靜止懸停、偏航運動、垂直升降等飛行姿態的控制。
以四旋翼無人機飛行高度控制為例,在登錄端與下位機無線模塊握手連接成功后,在上位機界面的控制端發送“上”指令,將數據發送到下位機主控芯片,改變PWM信號周期,控制四軸旋翼電機轉速,提升升力,從而改變四旋翼無人機的高度。
2013年10月,在西南大學第四運動場對四旋翼無人機進行靜止懸停、偏航運動、垂直升降等飛行姿態控制,測試結果如圖6所示。

圖6 四旋翼無人機飛行姿態測試圖
4.3 巡檢測試
通過上位機軟件界面上的登錄端,設置攝像頭的IP地址與端口號,保證攝像頭與上位機軟件間數據通信。針對巡檢園區拍攝圖像的質量要求,選擇圖像輸出的主流碼和拍攝圖像文件的保存路徑,然后點擊客戶端上的“播放”按鈕,實現對柑橘園區巡檢視頻的采集;點擊“停止”按鈕,實現柑橘園區巡檢視頻圖像采集文件的保存。
5系統運行效果
2014年7月1日至15日,在重慶市北碚區歇馬鎮柑橘園種植基地進行實地測試,對四旋翼無人機巡檢系統進行通信、巡檢時間以及巡檢功能的測試。試驗結果如下。
① 系統在通信測試上功能正常,主控芯片( K60DN512 )和視頻采集模塊( TH38R )能夠分別通過串口和以太網口,實現與無線模塊之間數據通信,無線模塊與上位機軟件間通過無線網絡,實現握手連接。
② 測試的柑橘園區種植面積較大,人工平均對柑橘園區巡檢一次需要3 h。通過15天測試,四旋翼無人機巡檢系統對柑橘園區平均巡檢一次需要0.5 h,巡檢時間上基本滿足預期設計目標。
③ 在15天測試期內,重慶的天氣一直是高溫少雨。每天針對柑橘園區巡檢2次,柑橘園區巡檢總次數30次,15天測試期內發現柑橘園區異常情況6次,在此期間四旋翼無人機巡檢系統出現了2次機械故障,故障率在6.7%左右。
通過巡檢視頻圖像數據,園區工作人員對柑橘園區異常情況進行準確定位,及時處理。四旋翼無人機對柑橘園區巡檢測試情況如圖7所示。
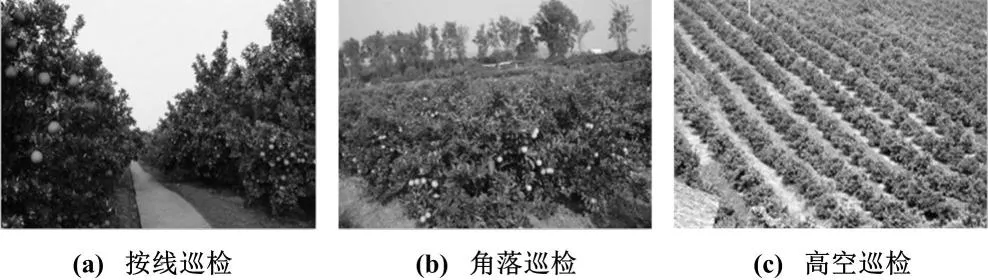
圖7 四旋翼無人機巡檢系統測試圖
6結束語
柑橘產業是我國水果產業的重要組成部分,直接關系到我國水果產業的經濟利益和安危,利用各種新方法和新技術來滿足柑橘園區的巡檢需求是一個重要的研究方向。四旋翼無人機以其搭載巡檢設備體積小、飛行靈活和通信可靠的優勢,具有廣闊的應用前景。本文設計了四旋翼無人機巡檢系統,解決了西南地區大面積柑橘園區巡檢困難、勞力輸出大的問題。系統還可以廣泛應用于抗災救援、軍事偵查等各個領域。
參考文獻
[1] 冉德森,周國斌.我國柑橘產業發展前景預測[J].湖北植保,2009(5):43-44.
[2] 張玉,趙玉,祁春節,等.中國柑橘產業可持續發展制約因素與對策[J].中國熱帶農業,2007(5):10-11.
[3] 宋自奮,張玉,祁春節.我國柑橘市場競爭力比較分析[J].安徽農業科學,2008,36(26):11602-11603,11610.
[4] 周立輝,張永生,孫勇,等.智能變電站巡檢機器人研制與應用[J].電力系統自動化,2011,35(19):85-88,96.
[5] 于德明,郭昕陽,陳方東,等.500 kV輸電線路線上監測系統應用[J].中國電力,2009,42(5):53-56.
[6] 吳功平,曹珩,皮淵,等.高壓多分裂輸電線路自主巡檢機器人及其應用[J].武漢大學學報:工學版,2012,45(1):96-102.
[7] 曹平軍,楊昌茂,王曉峰,等.飛行體姿態測量誤差校正方法研究[J].自動化儀表,2014,35(2):20-23.
[8] 鄭浩,王鷹,秦嘉喜,等.無人機巡線車的研究及設計[J].自動化與儀器儀表,2013(3):72-74.
[9] 王振華,黃宵寧,梁焜,等.基于四旋翼無人機的輸電線路巡檢系統研究[J].中國電力,2012,45(10):59-62.
[10]李加念,洪添勝,盧加納,等.柑橘園低能耗滴灌控制器[J].農業工程學報,2011,27(7):134-139.
[11]譚廣超.四軸飛行器姿態控制系統的設計與實現[D].大連:大連理工大學,2013.
[12]Xiong Jingjing,Zheng Enhui.Position and attitude tracking control for a quadrotor UAV[J].ISA Transactions,2014(53):725-731.
[13]劉杰.四軸飛行器研究與設計[D].南京:南京郵電大學,2013.
[14]梁延德,程敏,何福本,等.基于互補濾波器的四旋翼飛行器姿態解算[J].傳感器與微系統,20011,30(11):56-58.
[15]Xu Yan,Luo Delin,Xian Ning,et al.Pose estimation for UAV aerial refueling with serious turbulences based on extended Kalman filter[J].OPTIK,2014(125):3102-3106.
[16]黃華,仲元昌.TTS在智能公交報站系統中的應用[J].自動化儀表,2012,33(8):24-26.
[17]歐陽和平,陽暉.VS環境下假設檢驗Web應用程序開發[J].計算機與現代化,2012(10):187-190.
中圖分類號:TH7;TP249
文獻標志碼:A
DOI:10.16086/j.cnki.issn1000-0380.201507008
國家級大學生創新創業訓練基金資助項目(編號:201310635050)。
修改稿收到日期:2015-01-08。
第一作者高緒(1991-),男,現為西南大學農業電氣化與自動化專業在讀碩士研究生;主要從事農業電氣化與自動化理論與應用研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
