水平軸磁懸浮風力發電機混合磁軸承系統研究
2015-03-12 09:24:58王曉暉莫麗紅葉小婷賈紅云
微特電機 2015年11期
張 晨,張 濤,倪 偉,王曉暉,莫麗紅,葉小婷,賈紅云
(1.淮陰工學院,淮安223003;2.南京信息工程大學,南京210044)
0 引 言
風力發電機(以下簡稱風力機)主軸系統的支承方式直接影響著風力機的起動阻力矩、發電風速、維護成本和使用壽命。為了根本消除機械摩擦磨損、減少后期維護、增加發電量和提高風能資源的利用范圍,國內外眾多學者將磁懸浮軸承技術應用到風力發電機中,又稱磁懸浮風力發電機。但大多數的研究,主要是永磁軸承[1-6]與機械軸承配合使用,完成風力機主軸系統的支承。由于永磁軸承一旦制作成型,承載力不能人為控制,在較大風速下,一旦主軸的偏移量過大,無法回到懸浮位置,機械摩擦磨損問題將再次出現。此外,永磁軸承多采用磁環疊加方式,磁環安裝精度要求高,通常占據的徑向(或軸向)空間也較大[2-6]。而混合磁軸承具有設計簡單、體積小、電功率消耗少等優點,很可能成為未來磁懸浮風力發電機的主要支承形式,并將在縮減磁軸承體積、減輕整機重量、提高結構緊湊程度和塔架安全性等[7]方面作出重要貢獻。因此,本文采用混合磁軸承作為風力機的徑向支承結構,在徑向偏移量接近為零時,不消耗電功率,單靠永磁力就能實現徑向二自由度穩定懸浮;在偏離懸浮位置時,又可以通過控制線圈中的電流,以應對徑向偏移量的變化。
本文首先介紹了徑向混合磁軸承的結構形式與數學模型,對風力發電機轉子受力情況進行了分析,并完成了徑向混合磁軸承結構參數設計與分析;然后,設計了其數字控制系統,構建了徑向混合磁軸承基礎實驗平臺,進行了轉子起浮、擾動等相關試驗。試驗結果表明,樣機參數設計合理,系統動、靜態性能良好,為小型磁懸浮風力發電機的研究奠定了良好的基礎。
1 結構形式與數學模型
圖1 是徑向混合磁軸承橫截面和軸向剖面圖,單箭頭為定子永磁體產生的偏置磁通,雙箭頭為線圈產生的控制磁通,兩者相互作用,將產生使轉子懸浮的徑向力F。

根據參考文獻[8 -9],該磁軸承的等效磁路圖如圖2 所示。

圖2 徑向混合磁軸承等效磁路圖
假設轉子在x,y 軸上的偏移量分別為x,y,據磁路基爾霍夫定律,各氣隙處合成磁通:

根據轉子所受的電磁力與磁通關系得到:

將式(1)代入式(2),采用泰勒展開式在平衡位置附近作線性化處理,然后再沿著x 和y 軸投影,并進行電流等效變換后,最終得到混合磁軸承徑向懸浮力數學模型的矩陣形式如下:


式中;且二者均為常數。
2 參數設計與分析
2.1 轉子受力分析
以一臺300 W 水平軸磁懸浮風力發電機的設計為例,在徑向混合磁軸承設計之初,必須要明確徑向懸浮力的大小,圖3 是轉子結構受力分析示意圖。

圖3 風力發電機轉子受力分析示意圖
根據徑向上的力平衡和B 點力矩平衡可得:

式中:G1是風輪裝置的重量,取114.3 N;G2是發電機轉子系統的重量,取24.5 N;N1是徑向懸浮力大小;N2是機械軸承的徑向載荷。
由式(4)計算得出:N1=178.57 N,N2=39.77 N。因此,混合磁軸承提供的徑向懸浮力為180 N。
2.2 設計結果
徑向混合磁軸承參數設計過程依次為氣隙長度選取、磁極面積估算、安匝數設計、永磁體和定子參數確定[10-11]。根據這些初步參數,利用ANSYS 仿真軟件,建立徑向混合磁軸承3D 模型,逐個對重要結構參數進行優化仿真,并分析磁場分布情況。最終,得到徑向混合磁軸承主要參數的設計結果,如表1 所示。

表1 徑向混合磁軸承設計要求和主要參數
2.3 磁軸承剛度
剛度曲線決定了磁軸承的線性工作范圍、懸浮力提升和振動調節時間。因此,分析徑向混合磁軸承的剛度特性是十分必要的。以混合磁軸承在徑向y 方向上的偏移量為例,研究磁軸承的剛度特性,并給出氣隙長度的大小。

圖4 是徑向混合磁軸承剛度曲線。從圖4(a)中可見,當徑向偏移量y 在0 ~0.35 mm 變化時,力-電流曲線(或電流剛度)近似呈線性關系;在y=0 mm,i=1 A 時,徑向懸浮力在180 N 左右,滿足徑向承載力設計要求。從圖4(b)中可以看出,在0 ≤y ≤0.3 mm 時,力-位移曲線(或位移剛度)呈線性增長,并隨著控制電流i 的增加,徑向懸浮力也是穩步提升;而在0.3 mm <y≤0.45 mm 時,曲線已不再是線性關系。綜合考慮,選擇氣隙長度為0.25 mm。這樣,既確保了磁軸承工作在線性范圍,徑向懸浮力的提升完全適應徑向偏移量的變化,轉子振動調節時間也能相應地減小。
3 數字控制系統設計
3.1 總體控制框圖
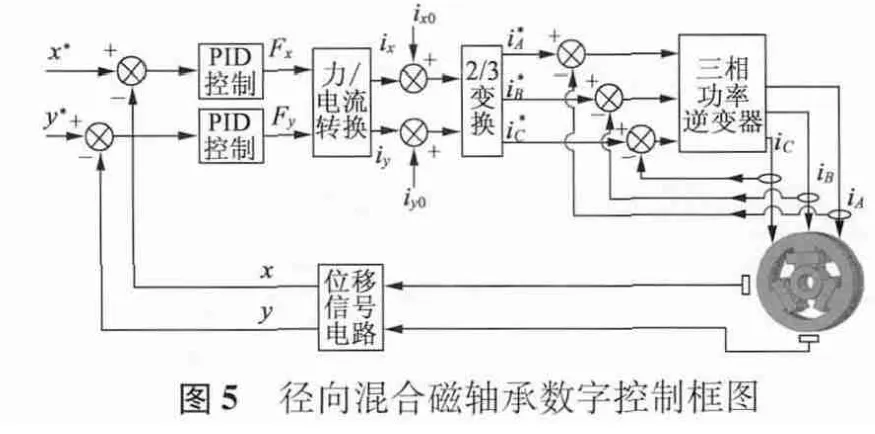
根據式(3)構建出徑向混合磁軸承數字控制框圖,如圖5 所示。首先,位移指令x*,y*與電渦流位移傳感器實時檢測到的x,y 比較后,經位移PID變換成Fx,Fy,由力/電流變換得到ix,iy,分別與ix0,iy0相加后,再由Clarke 逆變換得到i*A,i*B,i*C,與霍爾電流傳感器實時檢測的iA,iB,iC滯環比較產成PWM 波,驅動三相功率逆變器控制線圈A,B,C 中的電流,實現對x,y 方向上的徑向懸浮力控制。
3.2 主要硬件構成
本文采用的是以DSP 2812 開發平臺為核心的徑向混合磁軸承數字控制系統,其中硬件電路的設計主要包括DSP 控制電路、徑向功率驅動電路、位移/電流采樣電路和故障保護電路。
DSP 控制電路主要完成信號采集數字量、上位機PID 數據、位移-力-電流算法等內容,以產生PWM 輸出,驅動功率開關管,實現轉子徑向二自由度的穩定懸浮。徑向功率驅動電路采用的是交-直-交的主電路拓撲結構,經單相不控整流橋、電容濾波電路、光耦隔離電路和三菱IPM 智能模塊,提供磁軸承系統調節所需的能量。位移/電流采樣電路則是一個電壓調理的過程,以滿足DSP 的ADC 模塊模擬輸入0 ~3.3 V 的電壓限制。此外,為了避免IPM 智能模塊在電路發生故障時被損壞,同時考慮徑向混合磁軸承數字控制系統對電壓、電流的限定范圍。因此,需要設計過/欠電壓檢測、過電流檢測和驅動信號封鎖等故障保護電路。
3.3 程序流程圖
圖6 是徑向混合磁軸承數字控制系統的程序流程圖,主要包括主程序和主中斷服務程序。主程序是對系統控制寄存器,中斷PIE 和向量表以及EVA,ADC,SCI 等模塊進行了初始化設置;主中斷服務程序則是用來完成信號數字量轉換、位移-電流的雙閉環控制、上位機PID 調節參數的傳輸等任務。此外,還有SCIB 的接收、發送中斷程序。

圖6 程序流程圖
由于轉子起浮瞬間的徑向偏移量較大,容易引起頻繁振動,所以需要在PID 控制器中加入低通濾波環節,逐步衰減微分項幅度,也就是采用不完全微分PID 算法。這樣就使得微分作用時間變長,當轉子在平衡位置附近變化時很容易實現懸浮,減小了動態誤差,取得了較好的控制效果。
4 實驗結果與分析
根據表1 中徑向磁軸承設計參數,制作磁軸承樣機,并構建磁懸浮實驗平臺。采用數字PID 控制器進行徑向二自由度的位移控制,當比例增益Kp=10,積分時間常數Ti=0. 25,微分時間常數Td=0.000 010,微分增益ε =0.05 時,對位移接口電路進行調試,0 表示最大負位移,3 V 表示最大正便宜,1.5 V 表示轉子處于平衡位置,徑向混合磁軸承實現了穩定懸浮。圖7(a)是轉子起浮試驗,從圖7 中可以看出,起浮時間約40 ms,在y 方向上的起浮電壓大于1 V,x 方向小于1 V,穩定懸浮的電壓約為1.5 V;在斜向的方向上,給徑向轉子施加一個180 N 的外擾力,由圖7(b)可以看出,力的作用時間約為400 ms,x方向上的擾動較y方向明顯,在約20 ms的調節時間之后,轉子很快又回到了懸浮位置,說明系統具有較好的抗干擾能力。

5 結 語
本文主要研究了小型風力發電機用徑向混合磁軸承系統,包括結構形式、數學模型、參數設計、數字控制和懸浮實驗等方面的內容,解決了永磁軸承形式存在的懸浮力不可控、安裝精度高、占用空間大等問題,為混合磁軸承在小型風力發電機中的應用提供了實際參考,具有較高的科研價值和實踐意義。
[1] 王念先,張錦光,胡業發,等.小型磁懸浮風力發電機起動阻力矩研究[J]. 武漢理工大學學報(信息與管理工程版),2010,32(6):896 -899.
[2] 李麗君,房建成,韓邦成,等.磁懸浮風力發電機用錐形被動磁軸承分析與設計[J].軸承,2010,1:10 -13.
[3] 田錄林,李言,田琦,等.徑向磁化的多環嵌套永磁軸承軸向磁力解析模型[J].計算力學學報,2010,27(2):379 -383.
[4] 李國坤,聞淑英,李珂.微摩擦力全永磁懸浮軸承在風力發電機中的應用[C]//2006 中國科協年會論文集(下冊),2006.
[5] 賈東方,汪希平,李文鵬,等. 基于ANSYS 的軸向磁化磁環位置特性的研究[J].機械設計與制造,2010,(8):116 -118.
[6] 田錄林,李鵬. 錐形永磁軸承磁力解析模型[J]. 中國機械工程,2014,25(3):327 -332.
[7] 趙俊峰,朱熀秋. 磁懸浮風力發電機關鍵技術及其發展現狀[J].微特電機,2013,41(11):71 -74.
[8] 朱熀秋,沈玉祥,鄔清海,等.交流混合磁軸承建模與控制系統[J].中國電機工程學報,2009,29(18):100 -105.
[9] 張松,張維煜,朱熀秋.交流混合型磁軸承磁場及懸浮力特性分析[J].微特電機,2012,40(2):11 -14.
[10] 趙旭升,鄧智泉,汪波.異極性永磁偏置徑向磁軸承的參數設計與實現[J].電工技術學報,2012,27(7):131 -138.
[11] 張云鵬,劉淑琴,李紅偉,等. 基于磁路分析的軸向混合磁軸承徑向承載力解析計算[J].電工技術學報,2012,27(5):137-142.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
大電機技術(2017年3期)2017-06-05 09:36:02
Coco薇(2017年5期)2017-06-05 08:53:16
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電力工程技術(2014年1期)2014-03-20 14:19:06