內嵌驅動針織機械密度調節裝置的研制
2015-03-12 02:57:58胡旭東黃肖華彭來湖
紡織學報 2015年7期
胡旭東,黃肖華,彭來湖
(浙江理工大學教育部現代紡織裝備技術工程研究中心,浙江 杭州 310018)
內嵌驅動針織機械密度調節裝置的研制
胡旭東,黃肖華,彭來湖
(浙江理工大學教育部現代紡織裝備技術工程研究中心,浙江 杭州 310018)
針對多成圈路數針織機的密度調節裝置單元數量多,密度電動機布線復雜,后期維護不方便等一系列問題,闡述了一種內嵌驅動針織機械密度調節裝置的結構設計。將運動控制器、驅動放大器、反饋裝置集成于1塊電路板上,并嵌入電動機腔體實現一體化設計,由上位機通過CAN總線通信方式控制步進電動機的運轉,帶動偏置直動滾子凸輪機構,實現密度三角的調節運動。對結構設計、硬件設計、軟件開發等方面進行了詳細闡述。經現場測試證明,該裝置運行穩定可靠,有效解決了布線、安裝、維護等方面的困難。
密度調節裝置;內嵌驅動;CAN總線;密度電動機
針織機械,按工藝類別可分為緯編機與經編機。針織物因其良好的延展性、彈性與舒適性具有廣泛的應用市場[1]。針織機械的編織質量與多種因素有關,而密度調節是其中一種重要影響因素。
現有針織機較成熟的密度調節裝置結構中,密度電動機驅動控制板集中在控制柜中,從其引出電動機驅動線連接至密度電動機,由此驅動密度電動機并帶動密度三角滑塊,使密度壓針三角和起針三角運動[2-3]。這樣的結構在密度調節裝置數量大時,過多的密度電動機驅動線使得走線困難,布線復雜。集中控制的方式導致即使單個密度裝置出錯也要拆卸整個控制系統,給后期維護帶來不便。為此,本文研制了一種新型密度調節裝置,通過對控制架構的重新設計解決上述問題。
1 密度調節裝置結構設計
密度調節是對針織織物線圈結構的松緊程度進行調節,即調節密度三角的運動[4]。根據密度三角的運動軌跡以及密度調節參數,對密度調節裝置的各個零件尺寸進行計算,使用SolidWorks軟件對其進行三維建模,如圖1所示。
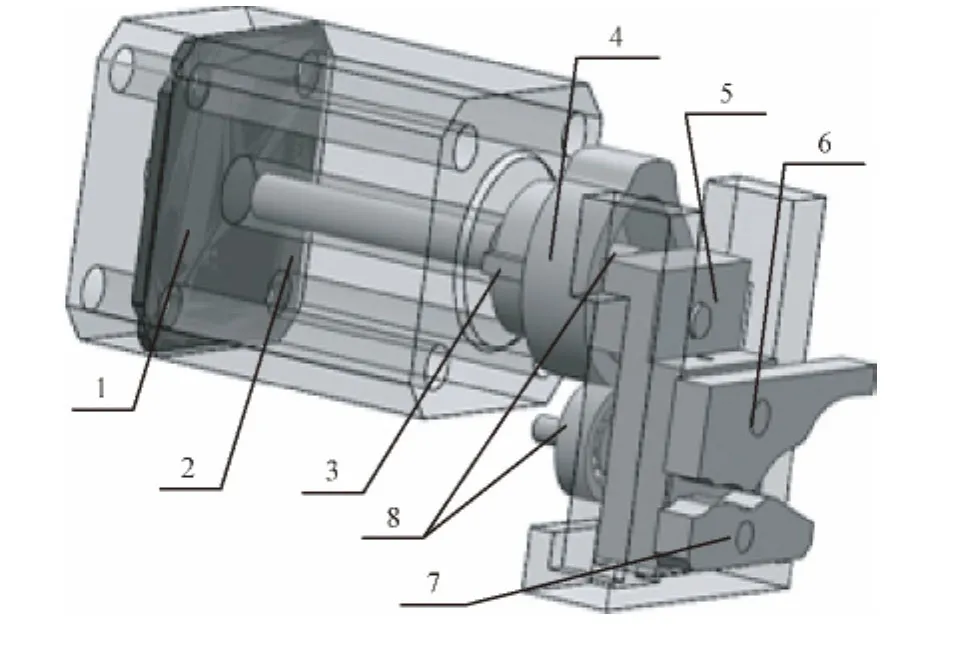
圖1 密度調節裝置三維建模Fig.1 Three-dimensional model of density regulating device
密度電動機驅動控制板設計為40mm×40mm的PCB板,各個模塊電路高度集成在該板上,并將其嵌入密度電動機腔體,實現一體化設計。上位機通過CAN總線與密度電動機驅動控制板進行交互,密度電動機使用步進電動機。
上位機發送指令到密度電動機,密度電動機運動帶動凸輪轉動,當凸輪上的磁鋼轉置安裝在機械上的霍爾傳感器時,由霍爾傳感器發送零位信號到密度電動機驅動控制板。凸輪采用了共軛凸輪的設計思想,在原有凸輪上加工出1個凸輪槽,升程和回程時都是用凸輪控制,使得傳動更加精確。
凸輪內外各有1個滾子軸承,2個軸承分別通過偏心軸、軸銷與滑塊相連接。凸輪的轉動推動2個軸承沿著凸輪內、外軌跡運動,使得與軸承連接的滑塊沿著導槽上下滑動,帶動密度壓針三角和密度起針三角的運動,實現密度調節[5]。
2 硬件電路設計
根據密度調節控制任務的要求及其特點將控制系統分為4個模塊:電動機控制模塊、電動機驅動模塊、電源模塊以及反饋模塊。圖2示出驅動控制器總體框圖。
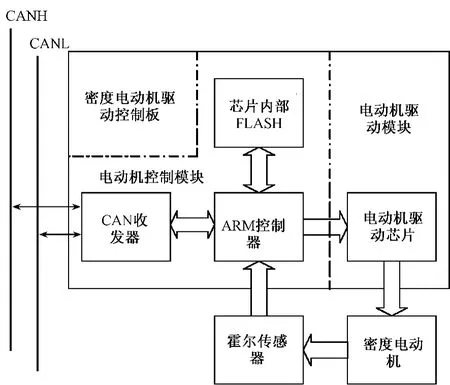
圖2 驅動控制器總體框圖Fig.2 Overall structure diagram of driving controller
2.1 驅動模塊電路設計
電動機驅動芯片采用BD63860,相較于其他驅動芯片,其較小的封裝,相對較大的驅動電流(最大電流可達2.5 A)以及完善的保護電路與散熱性能是選擇這塊芯片的主要原因[6]。
設計中沒有使用芯片RESET功能,這個引腳接3.3 V高電平,禁用復位功能。為節約布板面積,不選擇同步整流模式,因此將芯片 SR端接3.3 V高電平。
芯片RNF1、RNF2腳分別是A、B橋的電流檢測電阻連接管腳,內置1個比較器,比較電流檢測電阻兩端電壓的8倍與參考電壓來設置PWM斬波電流。參考電壓即由Vref端輸入。斬波電流輸出計算公式為

使用0.2 Ω的大功率電阻作為電流檢測電阻。參考電壓是由3.3 V通過2個電阻6.8 kΩ與6.2 kΩ分壓得到1.73 V電壓,因此,斬波電流為1.08 A。
當電動機的1個繞組被通電時,流經其的電流一直上升,直到它到達所設的斬波電流閥值,然后便將芯片內部橋式電路MOS管關斷1個固定的時間,這個固定的關斷時間由芯片CR1、CR2端口所接的電容與電阻決定。計算公式為

本文設計使用了39 kΩ的電阻和1000 pF的電容,計算得 tOFF時間為 39 μs。
BD63860提供3種衰減模式,分別為快速衰減、慢速衰減和混合衰減,經綜合考慮本文使用混合衰減模式。衰減模式由芯片MTH、VCR管腳上的電壓來決定。當MTH管腳電壓在0.6倍VCR管腳電壓與0.21倍VCR電壓之間,即為混合衰減模式,因此,設計MTH端電壓由3.3 V經2個電阻8.2 kΩ和4.7 kΩ分壓后得到的1.2 V電壓提供,VCR端直接連3.3 V電壓,即混合衰減模式。
芯片ENABLE、CW/CCW、CLK、PS這4個引腳和CPU相連,直接由ARM處理器進行控制。在工作中,ENABLE位于低電平時,即使能。在CLK上加上脈沖波,電動機就會運轉,1個下降沿步進電動機運轉1步,因此脈沖個數決定電動機運轉步數,脈沖頻率決定電動機運轉快慢。CW/CCW管腳的高、低電平決定步進電動機的運轉方向。
使用三極管連接至芯片VREF端,微處理器發出命令將三極管基極端置1,三極管導通,芯片VREF端參考電壓因分壓而降低,這時電動機電流也相應下降,以減少電動機驅動芯片的發熱量。
2.2 控制模塊電路設計
CPU使用恩智浦半導體公司的基于ARM Cortex-M0的 LPC11C24芯片。芯片內部集成了TJF1051CAN收發器,CAN收發器不但提高了系統的可靠性和質量,減少電氣互連和兼容的問題,還節省50%以上的電路板空間[7]。
因此,控制部分電路主要是由LPC11C22芯片組成的最小系統電路,芯片主要供電電壓為3.3 V,是由電源模塊提供。時鐘電路由晶體振蕩器和電容組成,為芯片提供時鐘信號。外部晶體振蕩器可以為主時鐘提供精確的占空比為50%的時鐘信號。復位電路主要為上電復位。
3 軟件設計
驅動控制器軟件總體設計流程如圖3所示。CAN中斷是對CAN報文進行接收。主程序是一個對CAN報文的查詢程序,該程序查詢指定的內存空間,當該空間內有CAN報文時,便通過制定的CAN協議對其進行解析,然后再執行相應的動作。
3.1 CAN應用層協議定制
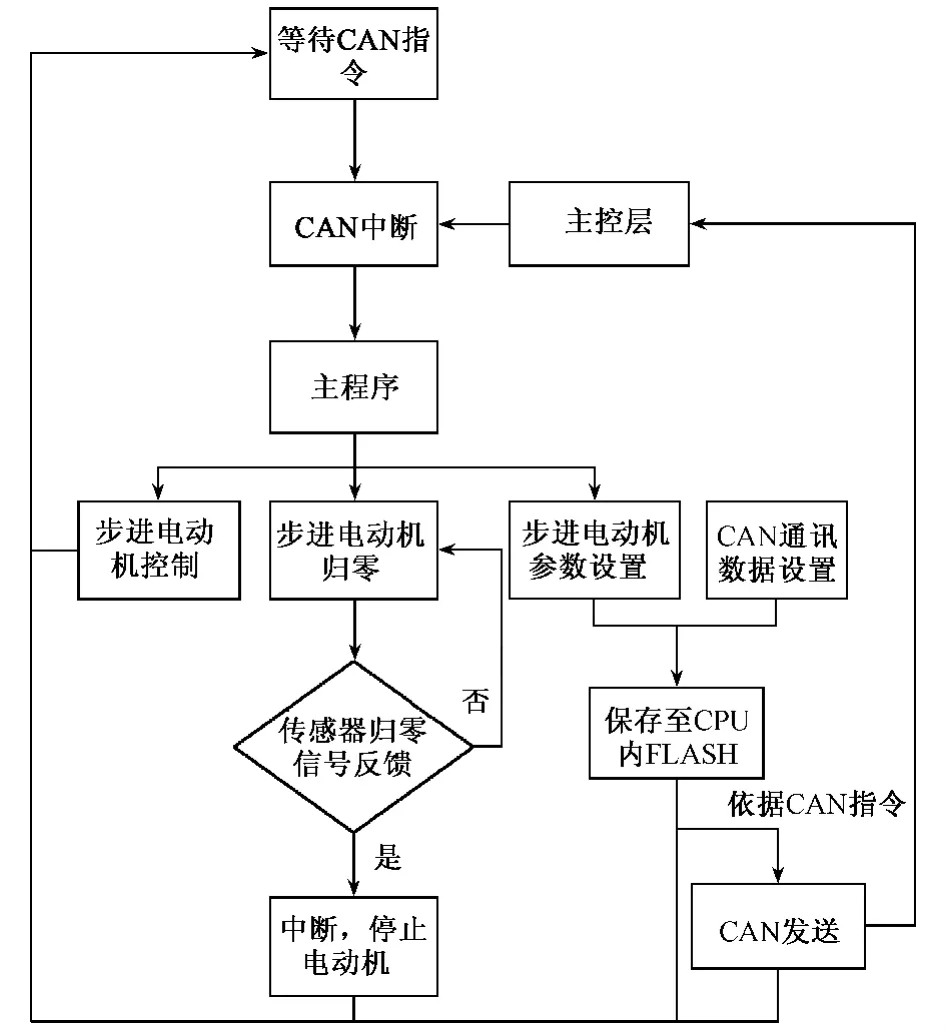
圖3 軟件總體設計流程圖Fig.3 Process flowchart of overall design software
CAN支持2種報文格式,唯一的不同是標識符(ID)長度不同,標準格式為11位,擴展格式為29位[8]。本文以CAN協議為基礎制定步進電動機控制協議,采用CAN報文擴展格式,即29位ID,分別為ID0~ID28。其中ID22~ID28位作為接收地址位,滿足多達27=128個電動機的控制,足以應對各種針織機械;ID21位為全局指令位,即當某CAN報文該位為1時,該報文被所有接收方接收;ID0~ID3為4位控制位,作為密度電動機的控制指令;ID4~ID11為8位數據位,用于指示步進電動機轉動步數;ID12~ID20為預留位,用于未來系統功能的擴展。
3.2 CAN驅動程序設計
3.2.1 CAN初始化程序
軟件初始化包括:配置寄存器進入初始化模式,使能CAN時鐘,根據實際波特率配置相應寄存器的值,配置報文對象4個步驟[9]。
LPC11C22芯片在報文RAM中為用戶提供了32個報文對象。設計中使用報文對象1~4為接收報文,報文對象5為發送報文。4個接收報文對象可組成接收FIFO緩沖區。在配置報文對象時,5個報文對象均需單獨配置,剩余27個不用的報文對象必須將它們設為無效(MSGVAL位設為“0”)。
將2個接口寄存器中的其中1個寄存器的屏蔽、仲裁、控制和數據域設為所需要的值,即可完成報文對象的配置。通過屏蔽與仲裁位過濾CAN報文的接收地址可大大減少CPU的資源使用。
寫相應的IF1命令請求寄存器,可將IF1報文緩沖區數據載入到相應報文對象中。當CPU啟動IF1寄存器和報文對象之間的數據傳輸時,報文處理程序將相關命令寄存器的BUSY位設為“1”。在完成傳輸后,BUSY位被設為“0”。
CAN報文發送配置類似于接收配置,只是寄存器中數值不同,在此不作詳細介紹。
3.2.2 CAN中斷處理
報文對象從1到32優先級逐漸下降,當RAM接收到報文時,根據報文存儲的報文對象的優先級產生中斷。
當發生中斷時,首先應排除錯誤中斷的可能。當確定是報文對象產生的中斷時,讀取中斷報文對象編號并利用另一接口寄存器IF2到該報文對象中讀取數據。最后,將接口寄存器IF2中數據放入RAM中的2個報文緩沖區中空閑的那個里去(通過BUSY位判斷),并將報文緩沖區中BUSY位置位,至此,報文接收成功。圖4為CAN中斷處理框圖。

圖4 CAN中斷處理框圖Fig.4 Structure diagram of CAN interrupt processing
設置2個報文RAM緩沖器的目的是:防止上一條CAN指令還未處理完便產生了下一條CAN報文中斷。因此,當上一條存儲在緩沖器1中的CAN報文指令未處理完時,將下一條指令存儲在CAN報文緩沖器2中,等待緩沖器1中執行完畢再執行。
3.3 掉電保存程序設計
因PCB布板面積有限,驅動控制器的一些重要數據(如步進電動機加速度,細分值等)以及CAN通訊波特率和站點ID需要實現掉電保存,因此考慮通過IAP方式將CPU芯片8個扇區32 kB Flash(0~7扇區,每個扇區4 kB)的最后2個扇區,即扇區6與扇區7分別用作驅動器數據以及CAN波特率站點的掉電保存區域。
向Flash內部寫數據流程為:先關閉所有中斷,讀取器件ID,再讀取Boot版本號,準備Flash扇區,擦出并且查空扇區,寫數據到扇區,比較數據,最后再開啟中斷。
調用IAP程序應通過寄存器r0中的字指針,該字指針指向含有命令代碼和參數的存儲器RAM中。
IAP程序是 Thumb代碼,駐留在地址0x1FFF1FF1。由于IAP地址的第0位是1,因此,當程序計數器轉移到該地址時會使當前指令集變為Thumb 指令集[10]。
3.4 步進電動機控制程序設計
步進電動機的主要控制參數有:步數控制、轉動方向、勵磁模式、速度大小、電動機使能控制以及步進電動機的歸零操作。通過控制脈沖頻率來控制電動機的轉速以及加速度,脈沖數量決定步進電動機轉過步數。通過控制步進電動機驅動芯片MODE1,MODE2管腳控制電動機勵磁模式,通過控制芯片其他管腳控制步進電動機使能、方向以及待機。
電動機轉動使用ARM處理器的定時器實現:當定時時間到,程序中斷,在中斷程序中對步進電動機脈沖進行翻轉并進行其他操作。圖5示出步進電動機轉動的方法以及步進電動機加減速的實現方式。
步進電動機的加速使用三角曲線算法,將曲線離散處理后計算步進電動機的運轉頻率以實現步進電動機的加速過程[11]。在定時器中斷時還應判斷電動機是否走完設定步數。
電動機減速通過電動機半電流模式實現。即在定時器中斷時判斷電動機已走步數,當快到達指定運轉步數時,將電動機鎖定在半電流模式下,靠電動機自身內阻實現電動機的減速。
本文設計采用霍爾傳感器檢測步進電動機零位:在密度凸輪附上磁鋼,當磁鋼轉至霍爾傳感器上方時,傳感器發出信號,經由處理電路處理傳至ARM芯片GPIO口。當ARM芯片接收到電動機歸零的CAN指令時,電動機開始轉動,直至ARM芯片接收到傳感器信號,GPIO中斷便會掛起,然后在中斷處理程序中關閉電動機運轉。至此實現了步進電動機的歸零操作。
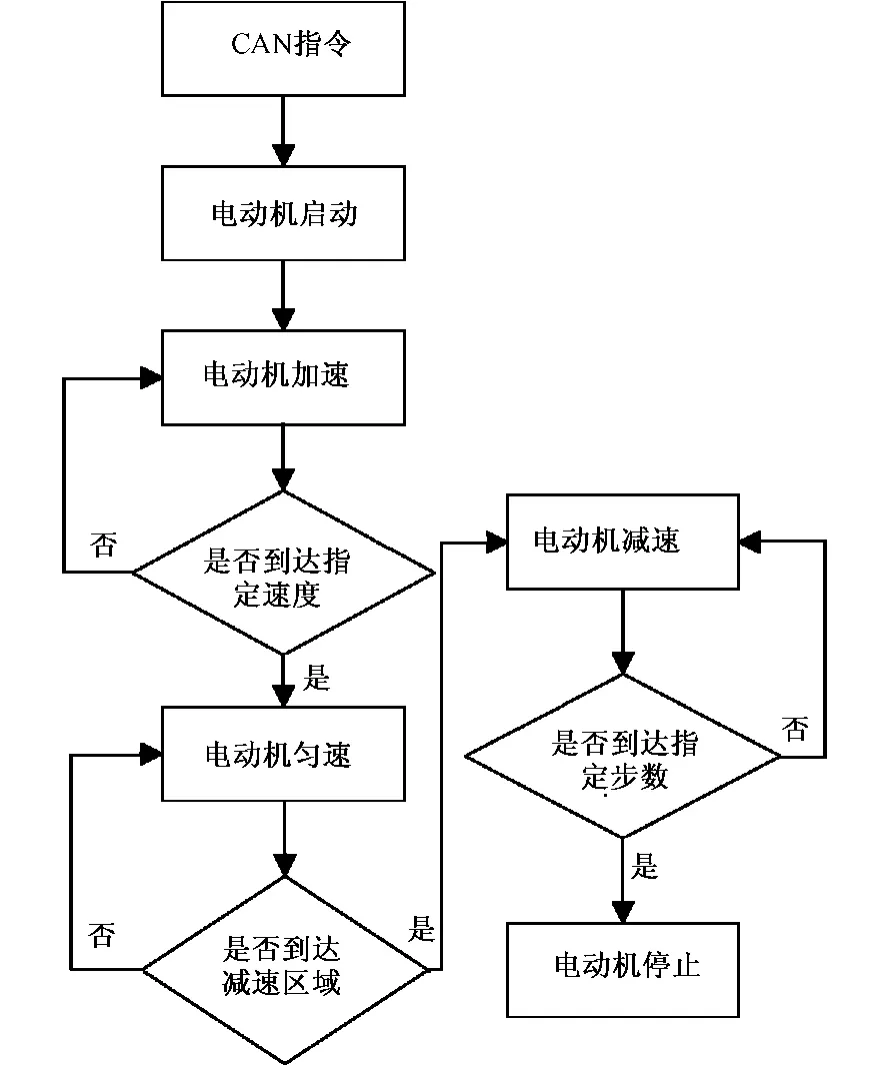
圖5 電動機控制程序框圖Fig.5 Structure diagram of motor control program
4 測試
現場調試時,將密度電動機應用于圓型緯編針織機,該圓緯機共有24個密度電動機。測試時密度電動機運轉穩定可靠,編織完成后,織物密度均勻平整。
測試時,按傳統密度調節裝置結構需要96根電動機相線,安裝極為不便,且相線之間互相干擾,可能導致電動機運轉不穩定的情況出現。本文設計的密度調節裝置只有2根CAN總線加上8個電動機為1組的共3組電源和地線,總計8根線,這樣的設計結構極大地簡化了走線,使安裝更為方便。同時,在某個密度電動機控制部分出錯時,只需將其尾部的電動機驅動控制板拆卸進行修理或者更換即可,方便了系統的后期維護。
5 結語
本文設計了一種密度調節裝置,提出了將密度電動機與其驅動控制器實現一體化設計的方案,通過CAN總線與上位機連接,并具體介紹了它的結構、硬件和軟件設計。該密度調節裝置克服了傳統裝置結構上控制、走線、安裝、維護等一系列環節的問題,具有良好的市場前景和應用價值。
[1] 陳堃.無縫針織內衣機紗線智能輸送系統的研究[D].武漢:武漢理工大學,2010:1-4.CHEN Kun.Research of yarn intelligentdelivery system of seamless underwear knitting machine[D].Wuhan:Wuhan University of Technology,2010:1-4.
[2] 雷寶玉.針織圓緯機的技術發展回顧[J].針織工業,2013(12):8-11.LEI Baoyu.Review of technological development of the circular weft knitting machine[J].Knitting Industries,2013(12):8-11.
[3] 李寧,吳曉光,張馳,等.基于電腦橫機應用的一種新型織物密度調節裝置[J].武漢紡織大學學報,2013(3):23-24.LI Ning,WU Xiaoguang,ZHANG Chi,et al.A new type of fabric density regulating device based on the application of computer flat knitting machine[J].Journal of Wuhan Textile University,2013(3):23-24.
[4] 吳興良.電腦橫機密度調節機構[J].機電產品開發與創新,2011,24(1):83.WU Xingliang.Computerknitting machine density adjusting mechanism[J].Development& Innovation of Machinery& Electrical Products,2011,24(1):83.
[5] 孫平范.無縫針織機的密度調節裝置:中國,CN101021029A[P].2007-08-22.SUN Pingfan.Density adjustment device of seamless knitting machine:China,CN101021029A[P].2007-08-22.
[6] 幸坤濤.步進電機驅動器BD63860及應用[J].電子世界,2009,30(4):17-19.XING Kuntao.Stepper motor driver DB63860 and its application[J].Electronics World,2009,30(4):17 -19.
[7] 恩智浦半導體.NXP推 出 首 款 LPC11C22和LPC11C24整合式CAN收發器微控制解決方案[EB/OL].[2011-01-26].http://www.elecfans.com/baike/bandaoti/bandaotiqijian/185903.html.NXP Semiconductors.NXP launches its first control solution that an integrated type CAN transceiver in LPC11C22 and LPC11C24[EB/OL].[2011 -01 -26]. http://www. elecfans. com/baike/bandaoti/bandaotiqijian/185903.html.
[8] 湯宏萍,薛根福.基于LPC2294的CAN總線協議設計及實現[J].信息系統工程,2013(1):123-125.TANG Hongping,XUE Genfu.CAN bus protocol design and implementation based on LPC2294[J].Information Technology,2013(1):123-125.
[9] 戴國駿,張翔,高申勇,等.基于實時性優化的CAN總線織機分布式控制系統[J].紡織學報,2008,29(1):114-117.DAI Guojun,ZHANG Xiang,GAO Shenyong,et al.Distributed control system of loom based on real-time performance optimized CAN-bus[J].Journal of Textile Research,2008,29(1):114 -117.
[10] 王偉,黃建娜.基于LPC2134 IAP功能的數據存取實現[J].裝備制造技術,2008(8):103-104.WANG Wei,HUANG Jianna.Data access based on LPC2134 IAP function[J].Equipment Manufacturing Technology,2008(8):103-104.
[11] 崔潔,楊凱,肖雅靜,等.步進電機加減速曲線的算法研究[J].電子工業專用設備,2013(8):45-49.CUI Jie,YANG Kai,XIAO Yajing,et al.Algorithm research in acceleration and deceleration ofstepper motor[J]. Equipment for Electronic Products Manufacturing,2013(8):45-49.
Development of inner embeds driver for knitting mechanism's density adjustment device
HU Xudong,HUANG Xiaohua,PENG Laihu
(Modern Textile Equipment Technology Engineering Research Center of Ministry of Education,Zhejiang Sci-Tech University,Hangzhou,Zhejiang 310018,China)
A large number of knitting cycle channels and density adjustment device units have the problems of much density of motor driver's wires,complexity of routing and inconvenience in maintenance.For these problems,a new structure design called inner embeds driver for knitting mechanism's density adjustment device is described.The motion controller,driving amplifier are feedback device are highly integrated on a circuit board.By making this board embedded in the motor driver's body,the integrated design is realized.The host computer control the stepper motor by CAN bus.Then the stepper motor drives an offset roller CAM mechanism.By this course,the adjustment of the density triangle is realized.The paper presents structure design,hardware design and software development in detail.It is proved by field test that the device is driving stably and reliably.At the same time it also effectively avoids the difficulty of routing,the installation and the maintenance.
density adjustment device;inner embeds drive;CAN bus;motor for density adjustment
TS 103.7
A
10.13475/j.fzxb.20140404406
2014-04-16
2014-11-28
國家科技支撐計劃項目(2013BAF05B00)
胡旭東(1959—),男,教授,博士。主要研究方向為紡織裝備自動化。E-mail:xdhu@zstu.edu.cn。