基于一維距離像的雷達目標識別*
2015-03-14 08:08:00李飛
艦船電子工程 2015年5期
李 飛
(92941部隊92分隊 葫蘆島 125001)
?
基于一維距離像的雷達目標識別*
李 飛
(92941部隊92分隊 葫蘆島 125001)
論文主要基于一維距離像研究了模式識別新技術在雷達目標識別中的應用,研究了一維距離像(HRRP)強度和平移敏感性,結合相對對準和絕對對準算法原理,對強度敏感性進行能量歸一化處理,用滑動最大相關法進行目標識別。最后對各種功能及算法用C語言實現,并對最后的識別結果進行分析。
雷達目標識別; 一維距離像; 平移敏感性; 強度敏感性
Class Number TN957
1 引言
雷達目標識別指用雷達設備獲取目標的特征信息(回波),并利用已掌握的各種目標的先驗知識,判別未知目標的類別屬性。因為各種形式的噪聲和雜波嚴重污染了雷達回波中有用目標信息,而且即使在無噪聲條件下,回波信號本身也往往不能包含足夠的信息使問題有確定的解。因而從雷達回波中提取的目標信息通常是不完全的,由于這種不完全使得雷達目標識別問題成為一種廣義逆的問題。雷達目標識別領域仍有大量的理論和實際問題有待解決。雷達目標識別是根據雷達目標回波進行的一種模式識別,因而也遵循模式識別的一般步驟,即包括信息獲取、預處理、模式特征提取[1]及模式分類決策。
本文首先應用相對對準方和能量歸一化的方法完成對雷達的一維距離像進行的預處理。然后采用等距抽樣的方法對訓練樣本進行抽樣,利用滑動最大相關法對目標進行識別,最后通過C語言實現運算,分析結果數據。
2 數據預處理
2.1 相對對準算法的原理
相對對準,可使用滑動最大相關系數準則來對準,其基本理論與滑動歐式距離相同。設樣本空間的距離像為X1,測試飛機目標的一維距離像為X2,它們之間的滑動距離定義為X1,X2的所有循環移動的最小距離:
SED(X1,X2)=argmini‖SiX1-X2‖2,
i=1,2,…,d
(1)
式中,d為距離像單元數,算子Si為將向量石循環左移i個距離單元,(由此有SdX≡X)。因為
‖SiX1-X2‖2=‖X1‖2+‖X2‖2-2(SiX1)·X2
(2)
因此SED(X1,X2)等于使得相關系數
λ(i)=(SiX1)·X2
(3)
達到最大的X1和X2對準。
因為SED距離只能移動距離像單元數的整數倍,因此利用SED距離作相對對準只能是一種近似的不變變換。當然,如果距離像單元數越多,則近似程度越高。為了避免單元數的減少,使近似程度降低,本文在此決定直接采用一維距離像作為目標識別的特征,這樣既避免了繁瑣的處理,提取過程中可能的數據丟失,還能保證單元格的數量,提高近似程度。
2.2 強度匹配因子和能量歸一化方法原理
2.2.1 強度匹配因子法
通常在目標識別中解決樣本強度敏感性方法[2~3]就是摒棄樣本的真實強度信息只利用形狀信息。其中,具體的處理方法有兩種:一是采用某種強度歸一化方法,二是利用切空間的思想搜索最優的強度匹配因子。
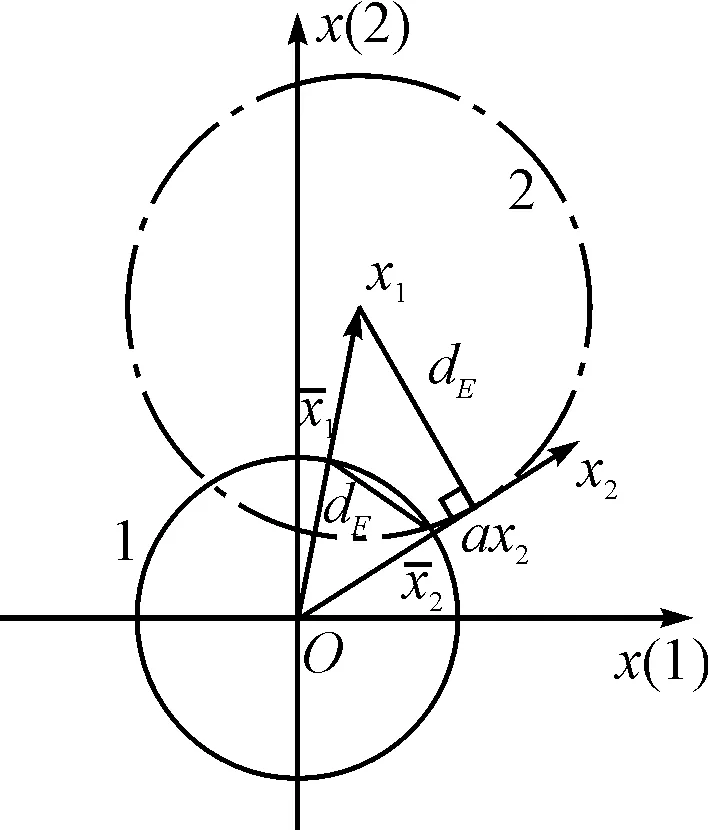
圖1 二維平面內的歐氏距離示意圖

(4)
上式可以通過最小二乘法求解:
(5)
將式(5)代入式(4):


(6)
2.2.2 能量歸一化方法
能量歸一化的方法相對于最優強度匹配因子要簡單很多,設未經能量歸一化的一維距離像為xi,能量歸一化后的距離像為xa,則有
(7)
由于高分辨距離像樣本具有平移和強度敏感性[4],解決這兩方面敏感性問題是雷達高分辨距離像目標識別預處理的基礎。
3 距離像的目標識別
3.1 等距抽樣法
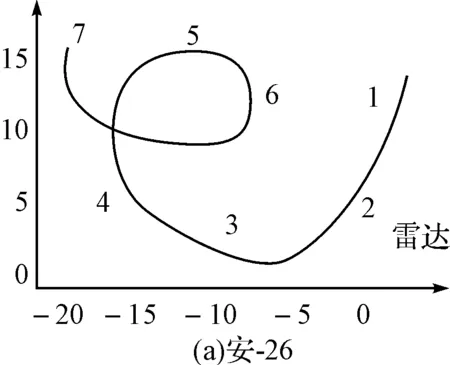
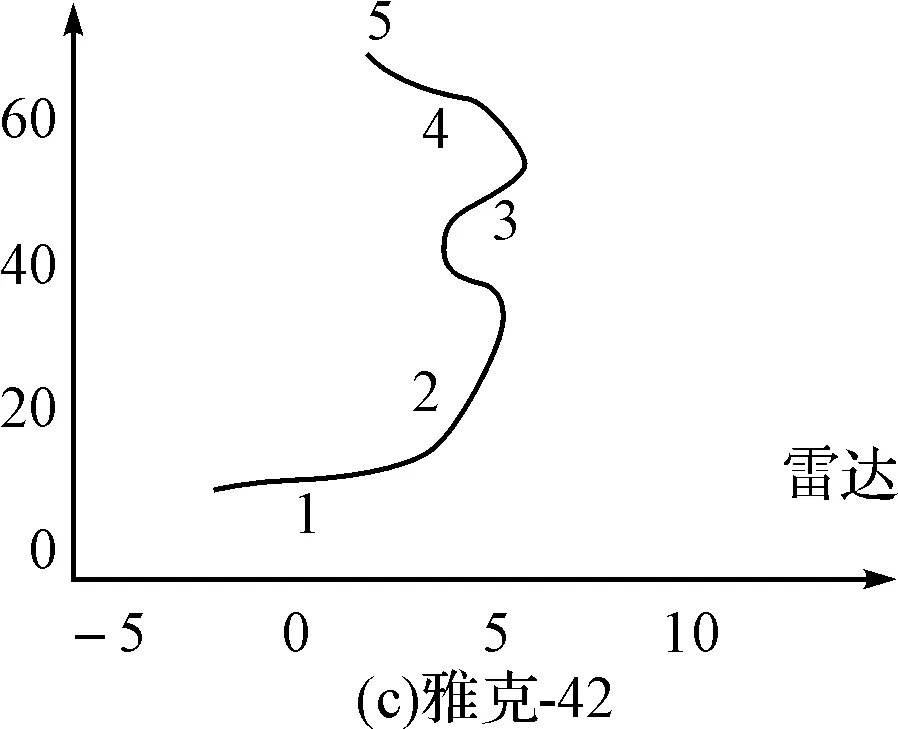
圖2 三種飛機的平面行距
等距抽樣[5~7]又稱機械抽樣或系統抽樣,是事先將總體各單位按某一標志排列,然后按固定順序和間隔來抽取單位構成樣本,在等距抽樣中用來排序的標志可以是無關標志,也可以是有關標志。采用等距抽樣可以使樣本單位較均勻的分布在總體中,有利于減少抽樣誤差,同時又具有方便經濟的特點,因此在實際中廣為使用。前面提到的將數據集按序號分成兩類,序號為奇數的作為一類,序號為偶數的作為另一類即為等距抽樣。實際數據分別是“安-26”、“獎狀”、“雅克-42”飛機的一維距離像每種飛機針對其姿態敏感性問題分別分了5~7個階段數據如圖2。每個階段數據有26000幅一維距離像,其經過FFT后所得一維距離像的像采樣點數為256。對于每階段的26000幅一維距離像真對其姿態敏感問題,取每階段的一維平均距離像,即每隔100幅取一幅距離像,則在每個階段平均一幅距離像所占的角度為0.014°,每隔100幅取一幅,相當于訓練樣本中每兩幅距離像間的角度差為0.14°,根據微積分原理,可以認為在該小角度范圍內的姿態不敏感。
3.2 滑動最大相關系數的識別方法的基本原理
滑動最大相關法實際上是在距離像域[8]包含了平移補償的模板匹配法[9],其匹配度定義為兩距離像的所有線性位移之間的最大滑動相關系數。對測試距離像xa,和模板xb,其最大相關系數定義為
p(xa,xb)=maxrxaxb(τ)
(8)
其中rxaxb(τ)為x平移τ后的滑動距離像xa(τ)與模板xb的相關系數。設滑動距離像和模板距離像之間所有循環移動的最小距離為SED(xa,xb),則
SED(xa,xb)=argmin‖xa(τ)-xb‖2
(9)
由于
‖xa(τ)-xb‖2=‖xa(τ)‖2+‖xb‖2-2xa(τ)xb
(10)
因此SED(xa,xb)使得相關系數rxaxb(τ)=2xa(τ)xb達到最大的兩幅一維距離像xa、xb識別。
4 程序實現及結果分析
4.1 功能模塊仿真實驗
4.1.1 對齊移位數據仿真
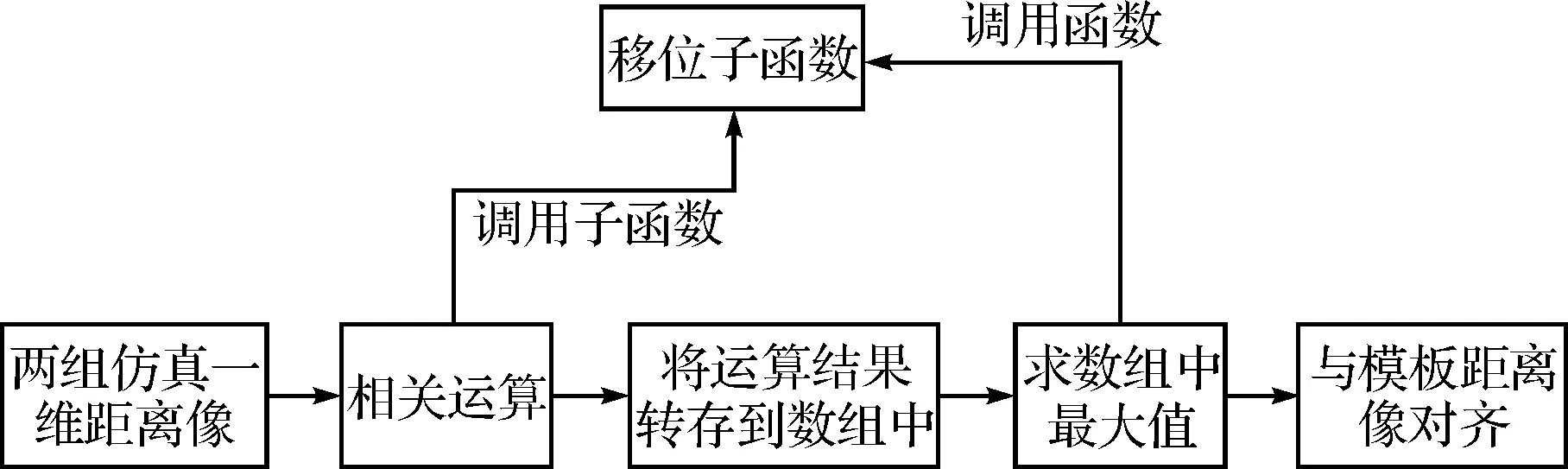
圖3 移位對齊程序設計結構框圖
4.1.2 能量歸一化數據仿真
設定一個3×3的二維仿真數組a[3][3]={{0,0,1},{5,5,5},{3,4,5}},即三幅一維距離像。其中數組的每一行都代表一幅一維距離像。根據能量歸一化的基本原理:
(11)
分別對每一行的一維距離像進行平方求和,并對求得的平方和進行開根號,最后每一行的每個單元除以所求得的平方和開根號,由此得出一幅能量歸一化后一維距離像的,利用for語句[10]循環三次,即將三幅距離像全部歸一化。其運行的結果如圖4。根據歸一化的原理對仿真數據進行手動計算,所得出的結果與用C語言計算的結果完全一致,確定能夠實現C語言能量歸一化模塊的功能。
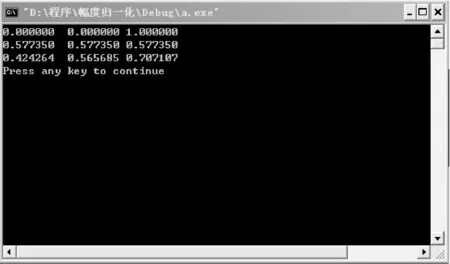
圖4 能量歸一化仿真程序輸出結果
4.2 識別結果及分析
圖5為本設計的雷達目標識別原理圖,包括雷達目標識別的預處理:對齊移位和能量歸一化,分類器的設計等環節。
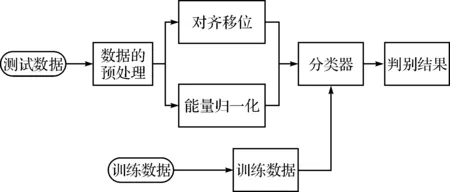
圖5 雷達目標識別系統原理圖
實際數據分別是“安-26”、“獎狀”、“雅克-42”飛機的一維距離像每種飛機針對其姿態敏感性問題分別分了5~7個階段數據,每個階段數據有26000幅一維距離像,其經過FFT后所得一維距離像的像采樣點數為256。對于每階段的26000幅一維距離像真對其姿態敏感問題,取每階段的一維平均距離像,即每隔100幅取一幅距離像,則在每個階段平均一幅距離像所占的角度為0.014°,每隔100幅取一幅,相當于訓練樣本中每兩幅距離像間的角度差為0.14°,根據微積分原理,可以認為在該小角度范圍內的姿態不敏感。所以對訓練樣本采用等距抽樣的方法,即在每一個階段每隔100幅取一幅一維距離像,組成了一個有260幅距離像的訓練樣本。
每類每個階段的距離像都有26000幅,如果把260幅距離像以外的所有距離像作為測試樣本,數據量過大無法計算,所以在這里采取不重復簡單隨機抽樣原則,首先給每類目標距離像編號1~26000號,通過Matlab中的函數Random.m產生1~26000內的服從均勻分布隨機數130個(取整),將130個隨機數對應序列的距離像作為測試樣本。這樣取測試樣本即減少了計算量,同時由于測試樣本的隨機性,并不影響最后的識別率統計。三種飛機第一階段的實驗結果如表1所示。

表1 三種飛機識別結果
5 結語
本文提出了一種滑動最大相關系數的一維距離像的目標識別方法,并通過C語言對飛機實際數據進行了工程運算,基本能夠滿足識別要求。但是由于實際數據比較龐大,運算速度較慢,還需要進一步優化設計。
[1] 胡薇.基于特征空間的3D目標識別方法[D].武漢:華中科技大學,2004:43-50.
[2] H. EI-Shishini, et al. A multistage algorithm for fast classification of patterns[J]. Pattern Recognition Letter,1990,10(4):211-215.
[3] 杜蘭,劉宏偉,保錚.利用目標方位信息改善雷達距離像識別性能[J].系統工程與電子技術,2004(8):1040-1043.
[4] Li H J, Yang S H. Using range profiles as features vectors to identify aerospace objects[J]. IEEE Trans,1993,41(3):261-268.
[5] 何曉群.多元統計分析[M].第一版.北京:人民大學出版社,2004.
[6] 王國胤.Rough集理論與知識獲取[M].西安:西安交通大學出版社,2001:57-82.
[7] 王智君.粗糙集規則簡約的方法在模式識別中的應用[J].微計算機應用,2009,30(5):1-4.
[8] 陳鳳,杜蘭,保錚.一種優化K近鄰準則及在雷達HRRP目標識別中的應用[J].西安電子科技大學學報,2007,34(5):681-686.
[9] 張亮,何松華,莊釗文.雷達目標一維距離象多分辨特征描述和快速匹配法研究[J].電子科學學刊,1998(3):552-557.
[10] 譚浩強.C程序設計[M].第三版.北京:清華大學出版社,2005.
Radar Targets Recognition Based on Range Profile
LI Fei
(Unit 92, No. 92941 Troops of PLA, Huludao 125001)
Based on range profile, the application of pattern recognition technology in radar target recognition is researched, and the strength and time-shift sensitivity of HRRP. The principle of relative alignment and absolute alignment are combined to normalize the energy of amplitude-scale sensitivity. The slide maximum correlation is algorithms are implemented by C Language. The recognition result is analyzed.
radar targets recognition, range profile, time-shift sensitivity, amplitude-scale sensitivity
2014年11月7日,
2014年12月26日
李飛,男,助理工程師,研究方向:信息處理測試。
TN957
10.3969/j.issn1672-9730.2015.05.020
