隨動裝置數字化設計關鍵共性技術及其工程應用*
2015-03-14 08:08:09張靂
艦船電子工程 2015年5期
張 靂
(中國船舶重工集團公司第七一○研究所 宜昌 443003)
?
隨動裝置數字化設計關鍵共性技術及其工程應用*
張 靂
(中國船舶重工集團公司第七一○研究所 宜昌 443003)
以隨動裝置為對象,基于虛擬樣機技術對其方案布局、運動學與動力學分析、結構有限元與拓撲優化,機電控制策略進行了研究,保證了產品滿足功能的條件下,具有合理的剛強度、較輕的重量以及準確的定位能力與跟蹤能力。通過產品初樣驗證,設計的裝置一次試車成功。所提出的基于虛擬樣機技術的全過程多層次數字化設計方法,促進了隨動裝置現代設計理論與方法的進步。
隨動裝置; 數字化設計; 方案布局; 結構拓撲; 虛擬樣機
Class Number TP27
1 引言
隨著社會的發展,人們對復雜機電產品的需求逐步增大,其設計要求也越來越高。在市場競爭日益激烈的今天,如何快速開發出滿足要求的新的高速化、輕型化、承載大、定位精確的機電產品,將是國家或企業立于不敗之地的根本。數字化設計方法作為設計的先期評估、測試和優化手段在工程設計中備受青睞[1]。采用數字化設計方法對于縮短產品的研發周期,提高產品的研發質量具有重要的意義。
李伯虎[2]等將復雜產品虛擬樣機開發工作定性為一個系統工程。馮培恩[3]等分析了虛擬樣機技術的特點和優勢,研究了挖掘機器人虛擬樣機技術的實現策略。Qing Shen[4]等利用虛擬樣機技術解決了機械工程與電子工程之間的交互問題。S. Esqué[5]等則指出了虛擬樣機技術在產品設計的早期階段的重要價值。Zheng Wang[6]在虛擬樣機平臺中考慮了環境的影響。方子帆[7]等以自主開發的收放裝置為研究對象,采用虛擬樣機技術和控制技術相結合的方法,開展了收放裝置回收水下裝置作業過程的運動學、動力學和控制策略研究。
以隨動裝置為對象,探討了數字化設計關鍵共性技術及其工程應用,為同類機電產品的設計提供了方法上的指導。
2 隨動裝置數字化設計共性技術
2.1 隨動裝置數字化設計目的
數字化設計是在先進設計理論的基礎上,結合CAD、CAE等技術,對產品進行設計、優化、分析與評價等,并開發出相關專用軟件系統的一種現代設計方法。其實質是基于產品描述的數字化設計平臺,建立基于計算機的數字化模型,實現設計過程的全數字化,從而縮短開發周期,降低成本,提高質量,設計出滿足用戶需求的機電產品。
應用數字化功能虛擬樣機模型和數字化仿真技術,對隨動裝置等產品進行特性分析和實驗仿真,在系統層次上實現產品的運動學、動力學、動態性能評估與零部件結構優化設計;在隨動裝置等產品的設計階段預測產品在設計和使用等過程中可能會出現的問題,指導全局優化,從而獲得高速、輕型、承載大、定位精確的隨動裝置等機電產品。
2.2 隨動裝置數字化設計關鍵技術
為滿足一定的運動功能,隨動裝置由相互運動的零部件組成,如何設計出運動過程中關鍵零部件受力峰值最小的隨動裝置,其方案布局優化是其數字化設計關鍵共性技術之一。
完成隨動裝置初步設計后,零部件的強度剛度是否在合理范圍內,整機的重量是否滿足特殊場合的要求,都需要充分的論據,故其零部件有限元分析與結構拓撲優化是其數字化設計關鍵共性技術之一。
完成隨動裝置零部件設計與校核之后,其傳動平穩性、定位精確性、跟隨能力是否真的滿足實際要求或如何滿足,其傳動控制系統設計同樣是隨動裝置數字化設計關鍵共性技術之一。
掌握隨動裝置運動特性與動力特性能可以準確地輔助零部件的設計,不管是整機方案布局優化的校驗,還是零部件有限元分析與結構拓撲優化,或是傳動控制策略的研究,都離不開隨動裝置整機運動學與動力學分析,故其基于虛擬樣機的運動學與動力學分析是隨動裝置數字化設計的關鍵共性技術之一。
2.3 隨動裝置數字化設計流程
為了保證了產品滿足功能的條件下,具有合理的剛強度、較輕的重量以及準確的定位能力與跟蹤能力,研究內容涵蓋了產品方案布局優化,運動學、動力學仿真分析,結構有限元分析及拓撲優化,以及隨動裝置傳動系統控制策略,其數字化設計流程如圖1所示。
由圖1可知,隨動裝置的數字化設計主要是基于虛擬樣機技術將機械系統設計與控制系統設計緊密聯系在一起的綜合設計過程。
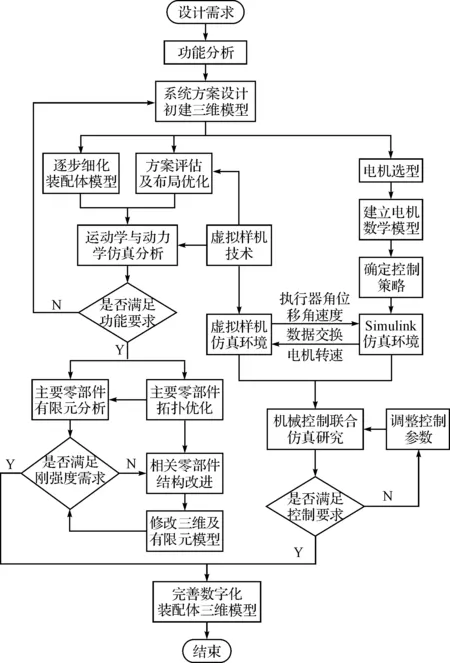
圖1 隨動裝置數字化設計方法流程圖
3 工程應用研究
為完成三維空間內任意方向的定位,隨動裝置由回轉運動與俯仰運動組成。回轉傳動采用兩級減速裝置,通過減速器實現電機的初級減速及90°換向,再通過回轉軸承內齒圈的終級減速,使回轉臺滿足規定時間內的回轉功能要求;俯仰傳動采用同步帶減速,然后是滾柱絲桿減速,使俯仰體滿足規定時間內的俯仰功能要求。為了提高隨動裝置的承載能力,提高運轉平穩性和可靠性,回轉與俯仰運動采用雙電機傳動系統。
3.1 傳動系統布局方案優化設計
1) 回轉傳動系統布局方案
考慮到回轉運動負載較大,且要求能夠高速平穩運行,采用了雙驅動電機,其回轉傳動系統的布局存在兩種方案,如圖2所示。
圖2中,1與固定基座(圖中未畫出)固連,2與4同時固連在回轉臺(圖中未畫出)上,3與4的輸出軸通過鍵連接在一起,4與5固連。回轉傳動原理為:當回轉電機5通過回轉減速器4減速后,輸出小齒輪3會與1發生相對嚙合運動,由于1固定不動,故3的自轉會帶動4、5、2及回轉臺繞支撐基座中心軸產生轉動,從而實現回轉傳動。
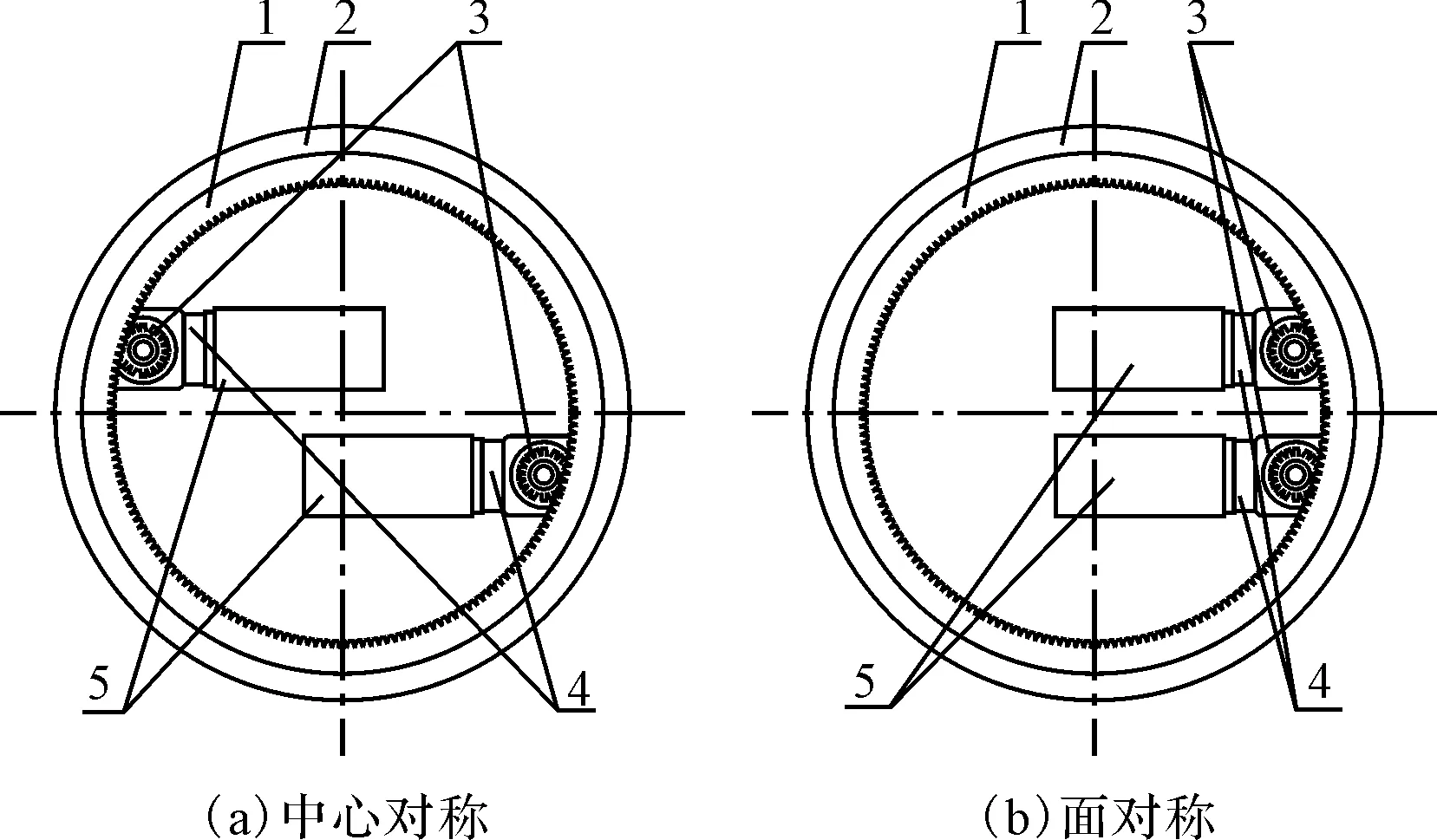
1-回轉支撐軸承內圈;2-回轉支撐軸承外圈;3-回轉減速器輸出小齒輪;4-回轉減速器;5-回轉電機圖2 回轉傳動系統布局方案原理圖
考慮到回轉體上方的俯仰體在仰角較大時,會對回轉支撐軸承產生傾覆力矩,而圖2(a)中回轉傳動系統的中心對稱布局方式相比于圖2(b)中的面對稱布局方式,更能克服一定的傾覆力矩,故選擇圖2(a)的回轉傳動布局方案作為較優方案。
2) 俯仰傳動系統布局方案
由于俯仰傳動負載較大,為了滿足高速、平穩的運行,俯仰運動采用雙電機驅動,其俯仰傳動系統的布局初步擬定以下兩種方案,如圖3所示。
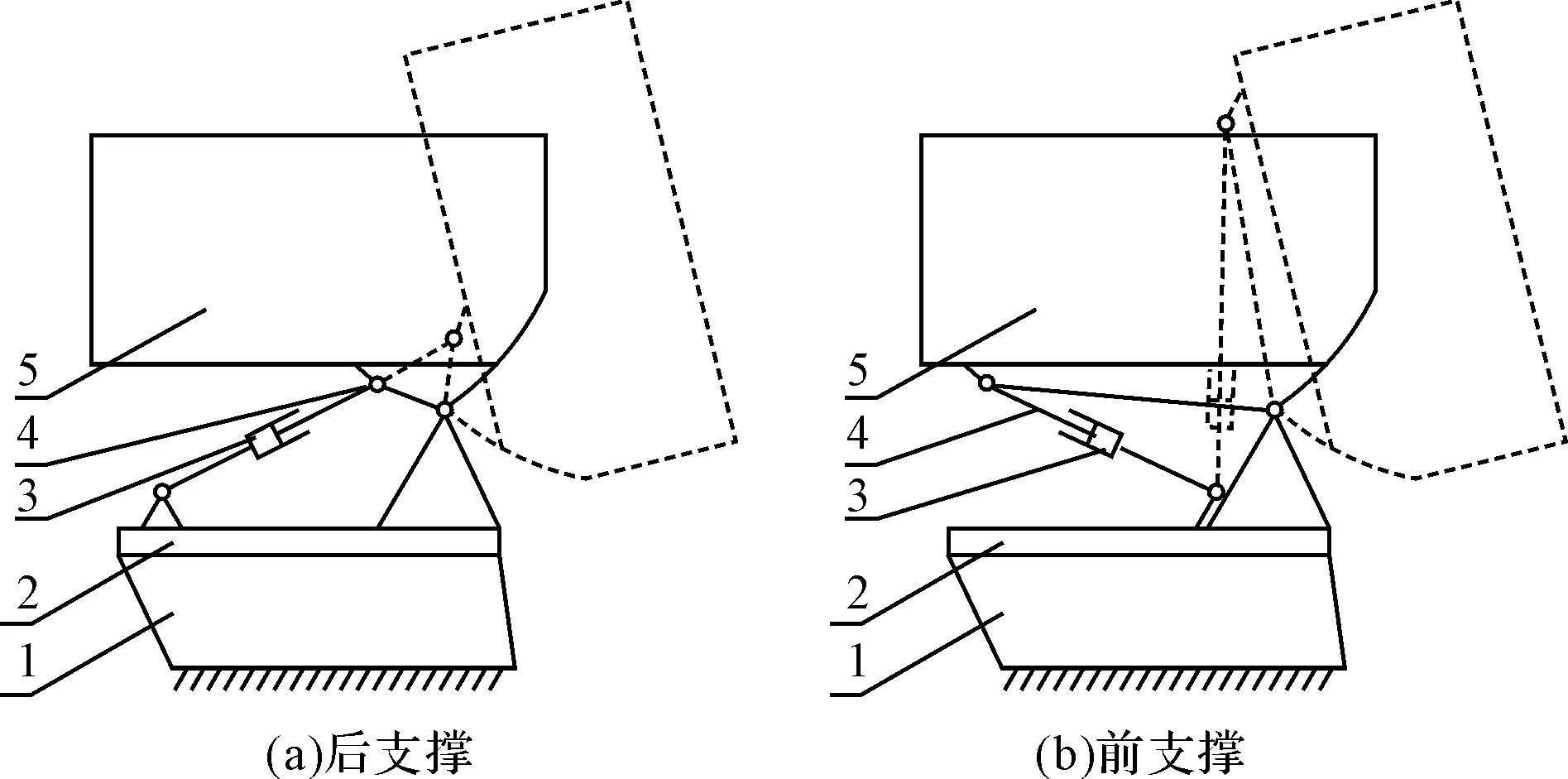
1-基座;2-回轉臺;3-電動缸;4-推桿;5-俯仰體圖3 俯仰傳動系統布局方案原理圖
圖3中,基座1包含了固定基座與回轉支撐軸承等(回轉傳動系統圖中未畫出),回轉臺2的低鉸點與電動缸相連,高鉸點與俯仰體5相連,電動缸3與回轉臺2鉸接,且其內滾柱絲桿的螺母與推桿4為固接,推桿4與俯仰體5鉸接相連。俯仰傳動原理為:俯仰電機正轉時,經電動缸3中的同步帶作一級減速后,再經3中的滾柱絲桿減速,螺母將沿著絲桿運動,在推桿4向外伸出的過程中,使俯仰體5繞耳軸向上仰起;當電機反轉時,在推桿4收回的過程中,使俯仰體5繞耳軸向下俯落,從而實現俯仰傳動。
為了選定產品布置方案,給出設計數據評價方法流程,如圖4所示。
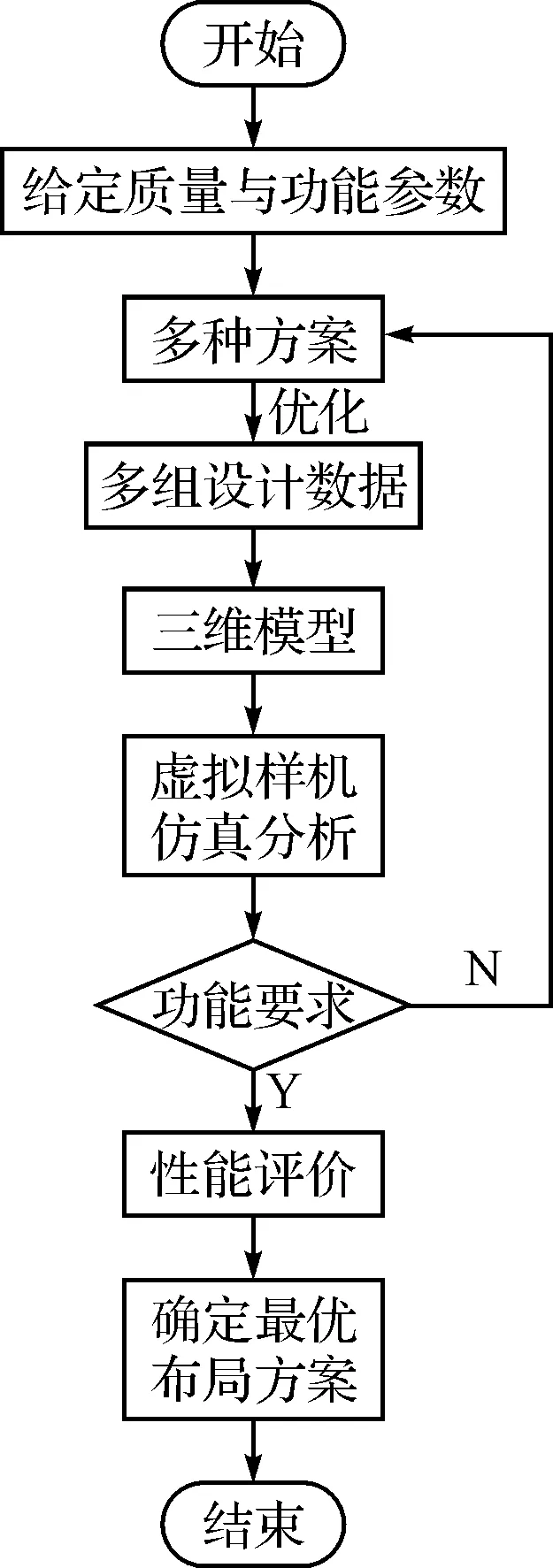
圖4 設計數據評價方法流程圖
在得出多種布局方案以后,建立俯仰傳動機構優化設計數學模型,結合復合形算法,編寫優化程序,經計算得到一組優化數據,由此建立其三維模型,最終導入ADAMS中建立虛擬樣機進行數據評價。
經優化評估與比較,得到俯仰傳動前支撐方式優化結果要優于后支撐方式優化結果,故選擇了俯仰傳動前支撐布局方式。
3.2 機械系統性能分析與結構拓撲優化
1) 數字化虛擬樣機
首先建立在結構和功能上與實物樣機接近的產品三維模型,通過仿真分析,預測產品的運動、動力性能以便于產品后續的優化及改進,減少實物樣機的試制次數,縮短產品的開發周期。
在隨動裝置數字化三維模型建立完成的基礎上,通過將其導入ADAMS多體動力學分析軟件中,并添加各類約束與驅動,可建立隨動裝置的功能虛擬樣機模型。
設置仿真時間為19s,定義仿真步長為3800步,按ADAMS默認求解器進行隨動裝置的運動學及動力學分析,如圖5~圖7所示。
由運動學分析可知,該產品的功能是滿足要求的。由動力學分析可知,左右傳動機構關鍵鉸點的受力曲線變化趨勢基本一致,回轉減速器輸出小齒輪與回轉支撐內齒圈嚙合力較大,這與齒輪傳動時存在接觸碰撞相關,由于其雙傳動系統是對稱布局的,故俯仰雙傳動系統相對應的鉸點受力及回轉雙傳動系統相對應的齒輪嚙合力大小應基本相同,均承擔相應負載力的一半。
2) 結構有限元分析與拓撲優化
采用變密度法對結構進行拓撲優化,以每個單元的相對密度作為設計變量,假定相對密度和材料彈性模量之間的關系,將結構的拓撲優化問題轉化為單元材料的最優分布問題,在一定材料用量的條件下,尋找具有某種度量的最大剛度或最小質量的結構材料最佳分布形式。
以體積最小(質量最輕)為優化目標,以設計區域結構應力值為約束,可建立連續體拓撲優化數學模型如下:
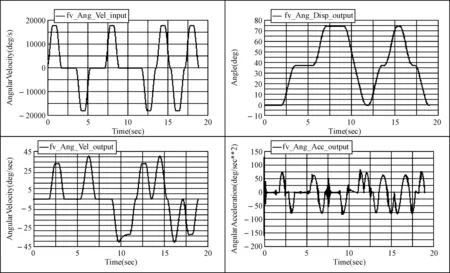
圖5 俯仰運動特性輸入輸出仿真結果曲線
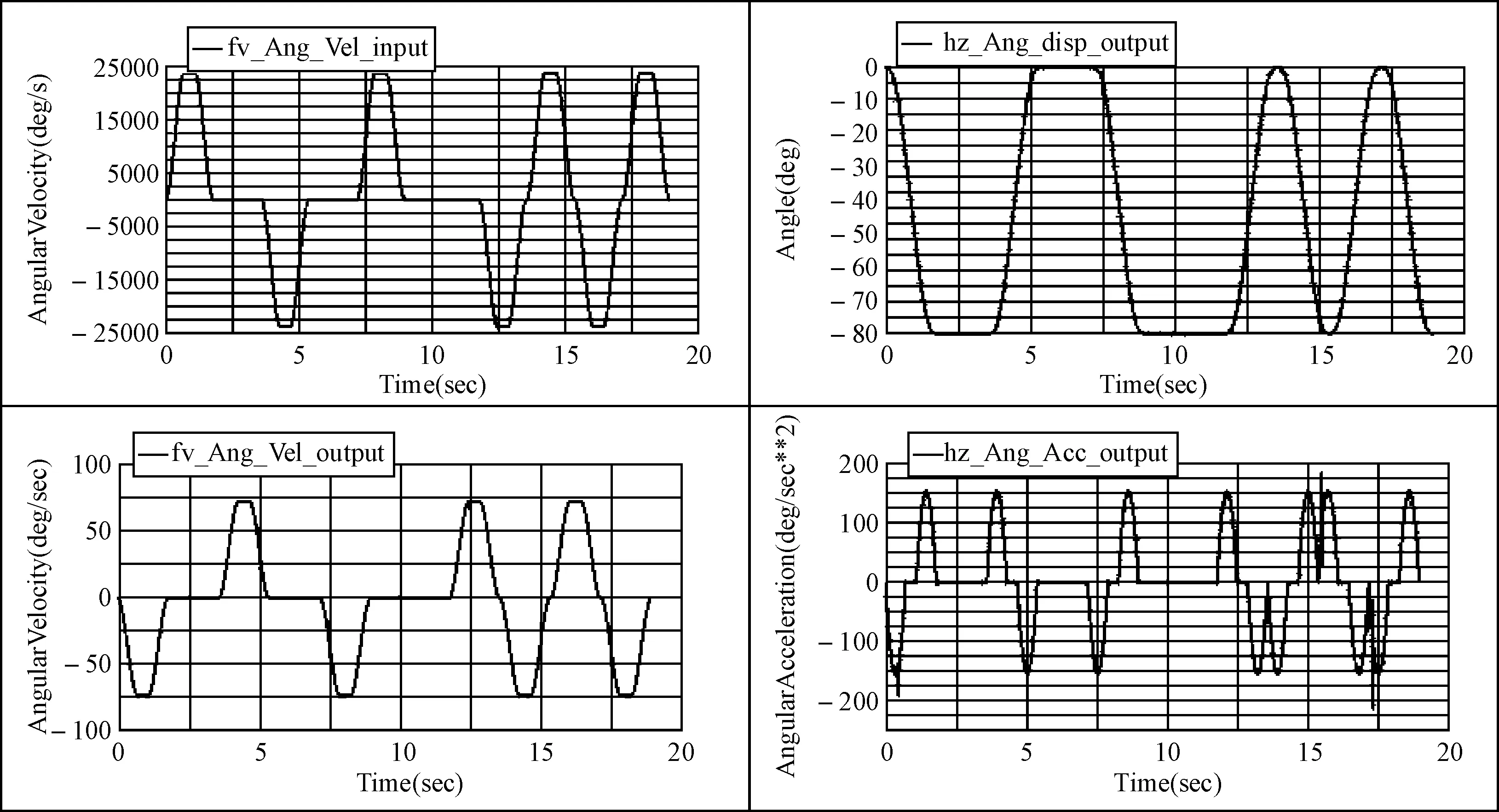
圖6 回轉運動特性輸入輸出仿真結果曲線
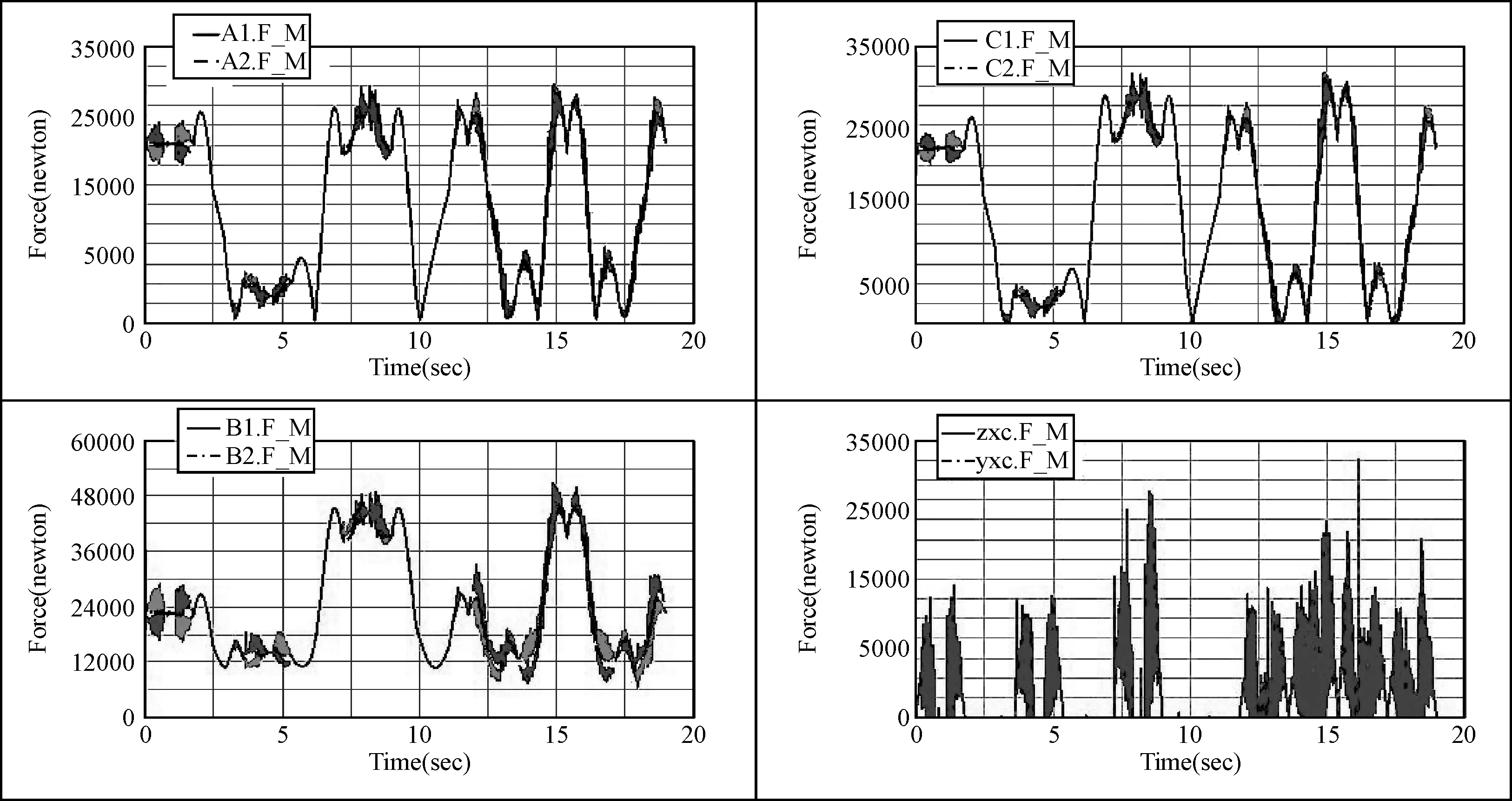
圖7 各關鍵零部件所受合力
(1)
式(1)中,xi為設計變量,V為連續體的體積,σ為結構應力,σmax為結構許用應力,find為體積比約束值。
以產品中某一個部件如基座為例,進行拓撲優化,其結果如表1所示。
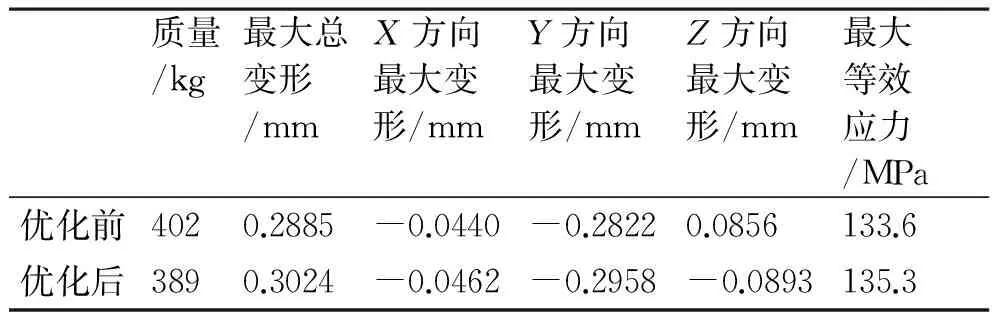
表1 拓撲優化前后基座的有限元分析總結
由表1可以看出優化后基座的最大總變形及各分方向上的變形量較優化前稍有變大,且最大等效應力稍有上升,但都低于材料Q235的屈服極限,這說明拓撲優化后基座剛強度有微小的減弱,但仍在合理范圍以內,通過拓撲優化減輕一定的重量后基座的強度與剛度仍能滿足設計要求,這為結構輕量化設計提供了一定的指導意義。
3.3 機電系統數學模型與控制策略
1) 機電系統數學模型
為研究系統控制策略,需建立伺服系統的數學模型,選用永磁同步電動機。
由于電機的定轉子參量間存在強耦合問題,控制過程要通過兩次坐標變換,分別是clarke變換和park變換來實現解耦。
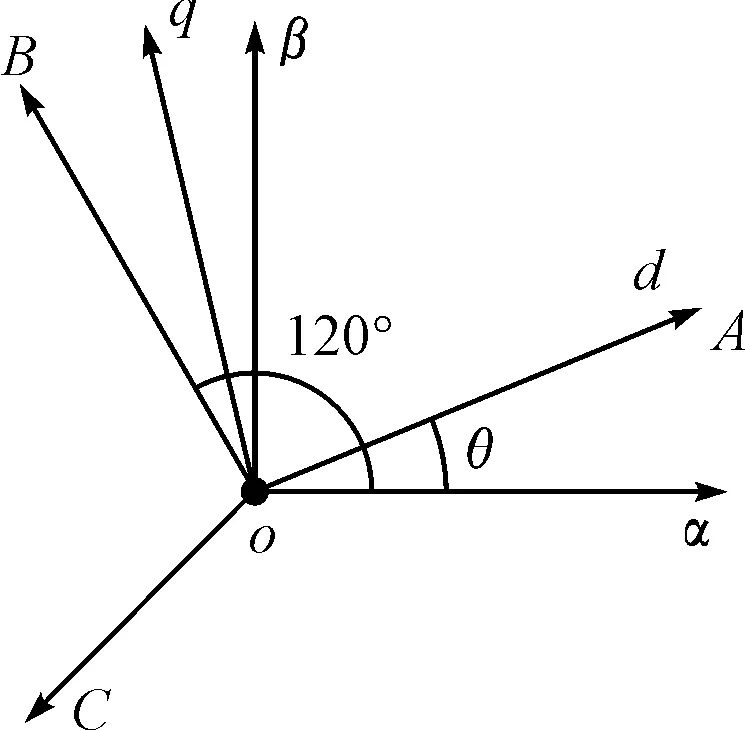
圖8 永磁同步電機三坐標系
由圖8同步電機三坐標變換,可知:
(2)
(3)
(4)
(5)
(6)
(7)
按動能守恒原理將隨動裝置機械部分等效至電機輸出軸,得機械運動方程為
(8)
其中,TM為電機驅動轉矩,Tf為負載轉矩,Jeq為隨動系統等效轉動慣量。
對式(8)進行拉普拉斯變換得機械運動傳遞函數為
(9)
2) 機電系統控制策略
采用三閉環控制策略,給定角位移參考信號,經過角位移調節器、角速度調節器、電流調節器、坐標變換及空間矢量脈寬調節器、逆變器以及電流、角速度、角位移的閉環反饋回路,實現永磁同步電機的控制。
位置調節器是主導調節器。位置信號θ跟隨給定信號的變化,位置調節器性能的好壞直接決定了系統控制性能的優劣。
轉速調節器,采用PI調節器,在實際系統的調試中,電機有額定轉速,要考慮限速的問題。
電流環調節器采用PI調節器,需要考慮啟動電流超調的問題。結合永磁同步電機的數學模型,選用的永磁同步電機矢量控制原理圖如圖9所示。
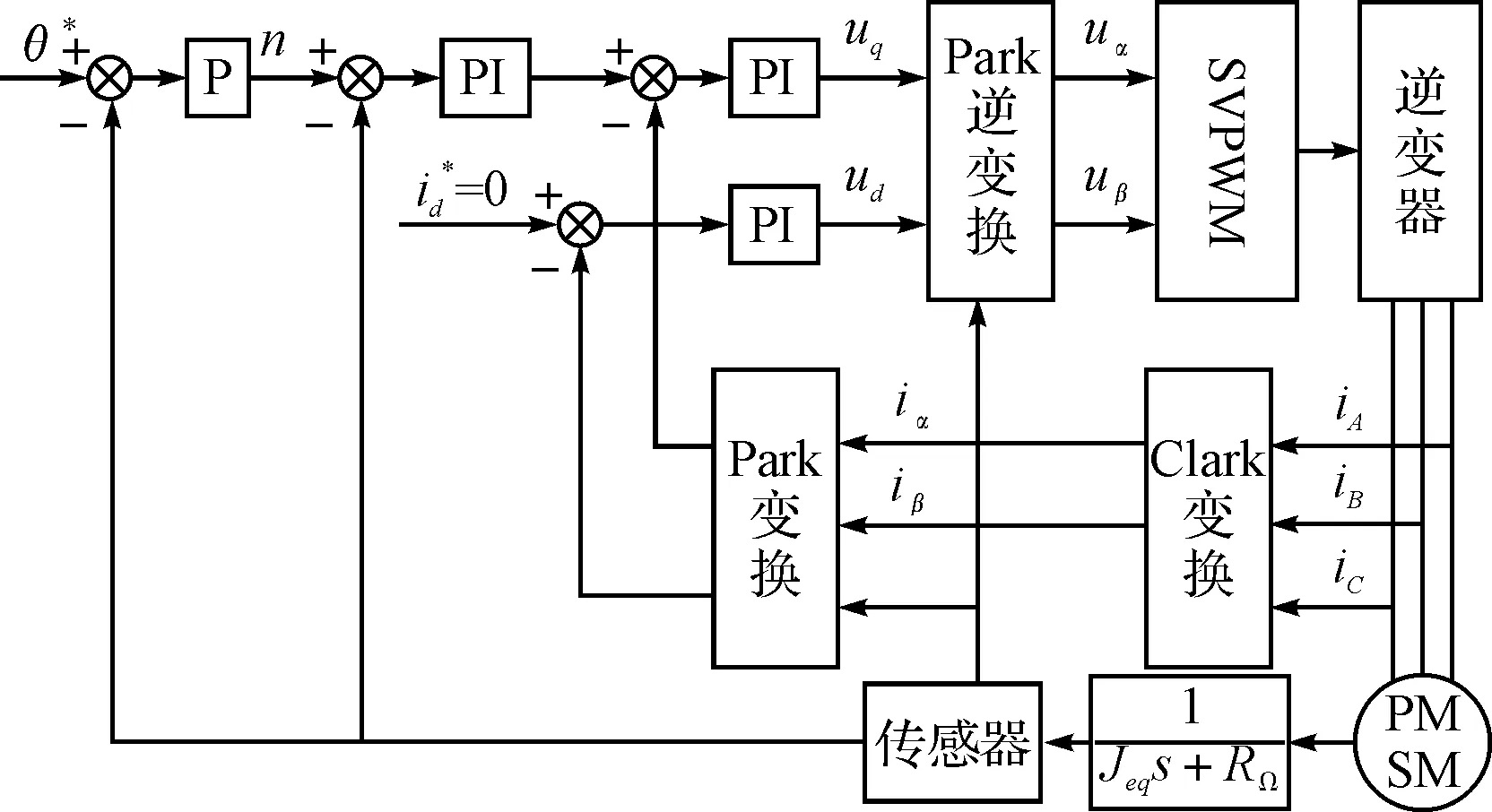
圖9 三閉環永磁同步電機矢量控制原理圖
3) 隨動裝置聯合仿真實現方法
采用ADAMS與Simulink實現隨動裝置機械系統與控制系統聯合仿真的方法步驟如下:
(1)在ADAMS中建立隨動裝置數字化功能虛擬樣機,確保模型正確無誤,能正常運轉,且運動學分析無誤;
(2)在ADAMS中定義機械系統的輸入、輸出變量,同時利用ADAMS/Controls模塊輸出.adm、.m、.cmd、及.xmt_txt等文件;
(3)在Simulink中建立主電機模塊、調節器模塊、逆變器模塊等,將Simulink控制文件、ADAMS虛擬樣機模型文件及其輸出的控制系統文件保存到同一個文件夾;
(4)設置參考信號,連接控制回路,定義采樣周期,設置示波器;
(5)運行聯合仿真,不斷調試以獲取各調節器最佳控制參數。
4) 隨動裝置聯合仿真研究
在Simulink環境中建立聯合仿真模型如圖10所示。
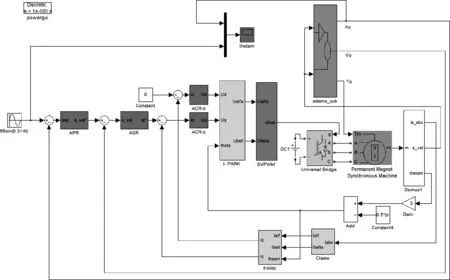
圖10 回轉傳動三閉環聯合仿真控制框圖
若給定角位移參考信號為幅值60°周期10s的正弦信號時,其響應如圖11所示。
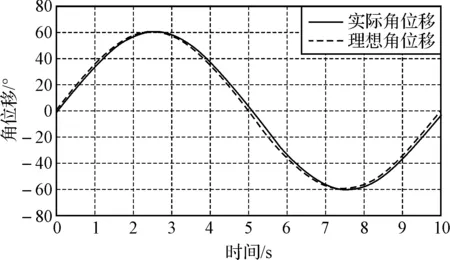
圖11 正弦信號的回轉角位移響應曲線
若給角位移定參考信號為幅值60°的階躍信號時,其響應如圖12所示。
從圖11與圖12來看,通過給定參考信號的聯合仿真結果響應可知,所建三閉環控制策略能夠滿足隨動裝置機械系統對階躍信號的定位能力,以及對正弦信號的跟蹤能力。
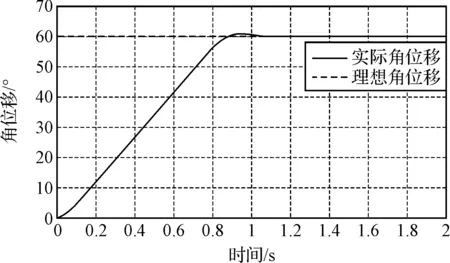
圖12 階躍信號的回轉角位移響應曲線
該數字化設計方法已成功應用于某型號隨動發射裝置樣機試驗,在通過前期模型仿真及虛擬樣機調試的基礎上,確保了試車一次成功,大大縮短伺服系統調試周期,避免設計風險。
4 結語
隨著設計方法和理念的不斷進步與發展,隨動裝置的全數字化設計已經逐漸普及并在產品研制中取得顯著效益,對提升產品質量及性能具有重要意義。隨動裝置采用數字化設計方法主帶來的主要好處為:首先,數字化方法在隨動裝置的機械系統設計中的應用主要包括產品方案布局與優化、三維模型的數字化、基于虛擬樣機的運動學與動力學分析、結構有限元分析與拓撲優化;其次,數字化方法在機電系統中的應用主要是控制策略的研究,通過仿真評價為實物樣機的控制系統調試提供了參數調節范圍;最后,通過虛擬樣機技術實現隨動裝置的機械系統與控制系統聯合設計,將產品的功能與性能結合起來,系統考慮,提高復雜機電產品的水平,促進產品現代設計設計技術的進步。
[1] 譚建榮,謝友柏,陳定方,等.機電產品現代設計:理論、方法與技術[M].北京:高等教育出版社,2009.
[2] 李伯虎,柴旭東,熊光楞,等.復雜產品虛擬樣機工程的研究與初步實踐[J].系統仿真學報,2002,14(3):336-341.
[3] 馮培恩,潘雙夏,丁國富.挖掘機器人虛擬樣機技術的實現策略[J].農業機械學報,2002,33(3):84-87.
[4] Qing Shen, Jürgen Gausemeier, Jochen Bauch, et al. A cooperative virtual prototyping system for mechatronic solution elements based assembly[J]. Advanced Engineering Informatics,2005,19(2):169-177.
[5] S. Esqué, J. Mattila, H. Saarinen, et al. The use of virtual prototyping and simulation in ITER maintenance device development[J]. Fusion Engineering and Design,2007,82(15-24):2073-2080.
[6] Zheng Wang. An interactive virtual prototyping platform considering environment effect described by fluid dynamics[J]. Robotics and Computer-Integrated Manufacturing,2012,28(3):316-325.
[7] 方子帆,向兵飛,肖華攀,等.高海況下收放裝置動力學及控制策略[J].機械工程學報,2013,49(15):88-95.
[8] 劉維京,王志新.發射裝置伺服系統數字化設計[J].電子設計工程,2013(20):101-103
[9] 羅欣健.某垂直發射裝置的結構設計與有限元分析[D].南京:南京理工大學,2013.
[10] 段小東,顧立志.機械產品的數字化設計特點與技術進展[J].機械工程師,2007(12):37-40.
[11] 徐艷華.復雜產品的虛擬樣機仿真技術研究[D].天津:天津大學,2004.
Key Commonness Technology and Application of Servo Device Base on Digital Design
ZHANG Li
(No. 710 Research Institute, China Shipbuilding Industry Corporation, Yichang 443003)
This paper takes a servo device as an object, its scheme layout, kinematics and dynamics analysis, structure finite element and topology optimization and control strategy are researched base on virtual prototype technology. It makes the product meet the function, and it guarantees reasonable strength and stiffness, light weight and accurate positioning and tracking of the product. In this paper, a whole process and multilevel digital design method base on virtual prototype is provided to promote the progress of servo device modern design theory and method.
servo device, digital design, scheme layout, structure topology, virtual prototype
2014年11月15日,
2014年12月17日
張靂,男,高級工程師,研究方向:電子對抗。
TP27
10.3969/j.issn1672-9730.2015.05.041
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2015年1期)2015-08-13 02:23:50
玩具(2009年10期)2009-11-04 02:33:14
個人電腦(2009年9期)2009-09-14 03:18:46
