基于人工智能的無人機航路設計的淺用*
2015-03-15 00:44:59萬業軍李偉兵
艦船電子工程 2015年2期
萬業軍 李偉兵
(1.武漢軍械士官學校 武漢 430208)(2.陸軍軍官學院 合肥 230031)
?
基于人工智能的無人機航路設計的淺用*
萬業軍1李偉兵2
(1.武漢軍械士官學校 武漢 430208)(2.陸軍軍官學院 合肥 230031)
論文在蟻群算法實現人工智能優化的基礎上,建立了基于最短路徑的風險規避模型。利用數學幾何原理對初步方案再優化,得到滿足決策者風險要求的最優飛行方案。基于Matlab軟件實現了對模型模擬仿真,其計算機模擬計算過程也顯示了良好的風險規避效果。
人工智能; 蟻群算法; 航路設計; 無人機
Class Number V279
1 引言
武器無人化的發展趨勢成為各國軍事力量的一個重要特征,而無人機(UAV)作為武器無人化的杰出代表在現代戰爭中的作用越來越突出[1]。實現無人機自主飛行的關鍵問題是無人機的航路設計[2],這個過程中要考慮偵察任務要求、威脅分布、飛行器性能、燃料限制等因素,因此航路設計很大程度上是在滿足任務要求的基礎上,綜合考慮飛行器性能,并規避敵方威脅,找尋最短偵察路徑的過程。而在偵察任務量比較大的情況下,一般的優化方法不能滿足復雜的模型求解需要,這時通常用人工智能優化方法替代,而蟻群算法是最常用的智能算法之一[3~7]。為了尋找無人機對所有偵察點實現偵察的最優或次優的飛行路線,本文在蟻群算法實現對航路人工智能優化的基礎上,考慮敵方威脅分布,提出了基于最短路徑的規避風險算法,提高了航路的安全性。
2 基于蟻群算法最優模型的建立
無人機在申領偵察任務包括偵察點數量和地理位置后,假設航路優化設計的目標是巡航距離最短,則可利用人工智能的蟻群算法[6,8]來獲得無敵方威脅時的無人機最優航路。
設bi(t)表示t時段位于偵察點i的螞蟻數目,τij(t)為t時段路徑(i,j)上的信息量,n表示偵察點的數量,即該航路設計的規模,m為螞蟻的總數目,則有
偵察點的集合記為C,設Γ為t時刻集合C中兩兩偵察點路徑上殘留的信息素量集合,則有
Γ={τij(t)|ci,cj?C}
在初始時刻各條路徑上的信息素量相等均為P,則τij(0)=P,而基本蟻群算法的尋優是通過有向圖g(C,Γ)來實現的,目的是找尋出長度最短的Hamilton圈。
因螞蟻k不能重復經過同一偵察點,因此有必要建立一個禁忌表tabuk(k=1,2,…,m)來記錄螞蟻k走過的偵察點,禁忌表隨著時間做動態調整。
建立螞蟻k由i偵察點轉移到j偵察點的狀態轉移概率如下
上式中α為信息啟發式因子,表示路徑的相對重要性,是對所積累的信息素影響作用的一個加權值;β為期望啟發式因子,表示能見度的相對重要性;ηij(t)為啟發函數,其表達式為
在一個循環結束后,需對殘留信息進行更新處理,故對于t+n時刻給定如下信息量處理規則

上式中Q表示螞蟻攜帶信息素的量,其值的大小影響算法的收斂速度;Lk表示第k只螞蟻在本次循環中所走路徑的總長度。
3 基于最短路徑的風險規避模型的建立
假設無人機在巡航空域存在來自敵方的威脅,本文以若干敵方導彈分隊為例,設其有效攻擊空域為圓面,圓心為O,坐標已知,半徑為R,兩個毗鄰的偵察點為A,B,坐標已知,首先要判斷導彈分隊是否對無人機帶來實際威脅,而后針對實際威脅進行風險規避。
引理 如圖1所示,若AB為圓O的割線,若從A點不經過圓面部分到B點,此時最短的路徑為
對照圖1的幾何圖形,引理的正確性是顯而易見的。
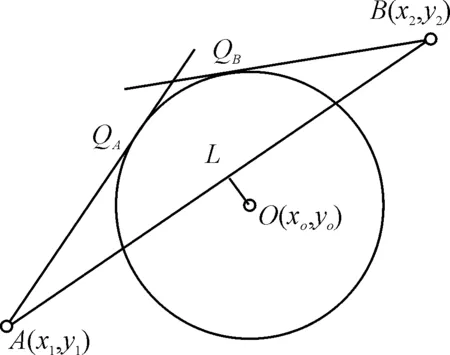
圖1 毗鄰偵察點、敵方導彈分隊示意圖
引入參數a,b,c,可得到圓O的割線AB和圓心O到AB的中垂線OL的兩點式方程和通用方程,分別設為
AB:ax+by+c=0;OL:a(y-yo)-b(x-xo)=0
根據已知條件可得方程分別為
通過解方程組可得L點的坐標
根據點到直線的距離定理,對于直線來言,圓心O的坐標(xo,yo)到直線的最短距離為
根據待定系數法求出對應的三個未知數a,b,c,略去求解過程可得到三個未知數a,b,c的值分別為
因此可計算出點(xo,yo)距直線的最短距離L,而敵方威脅的個數可根據L與R的關系來判斷,用0,1來表征實際威脅,因此判斷實際威脅的方法如下
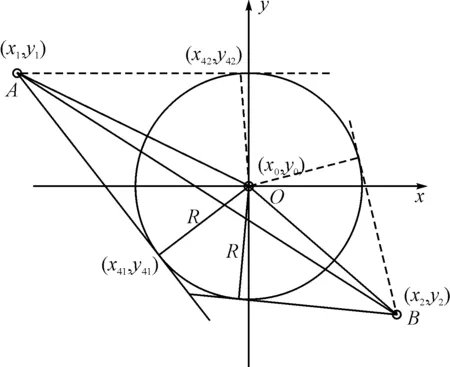
圖2 切點坐標算法示意圖
線段AQA,QBB的長度的計算方法采用兩點間的距離公式直接求解,這要求知道兩個切點的坐標,這是本文求解的一個非常重要的環節,具體實施方法,如圖2所示。
根據三角函數和反三角函數的知識對兩種情況下的切點坐標進行求解,兩個切點的表達式分別為
4 程序實現與模擬仿真
本文給出一個航路設計的實例,設無人機起飛點坐標為(0,0),并把它作為航路設計的第一個偵察點,任務偵察點、威脅圓心的經緯度如表1所示。
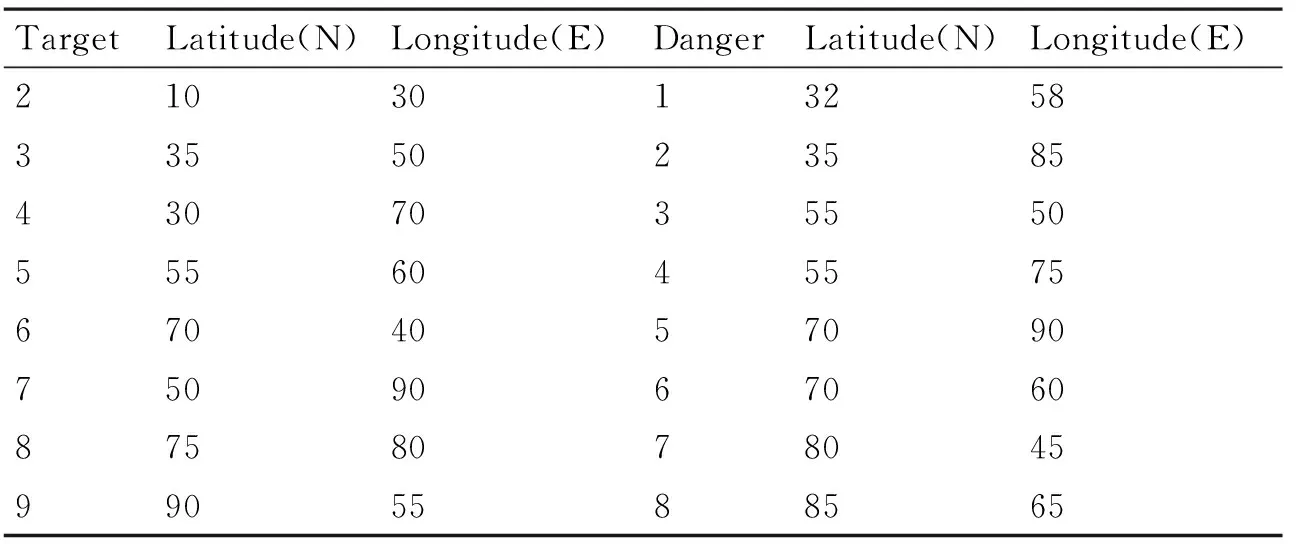
表1 經緯度表
假設地球為球形,則球的表面距離公式為
l=(Re+H)×arccos(sinN1sinN2
+cosN1cosN2cos(E2-E1))
其中Re為地球半徑,取Re=6400km,H為某型無人機巡航高度,取H=10km,N1,N2為兩點的緯度,E1,E2為兩點的經度。
4.1 基于蟻群算法最優模型的模擬
采用Matlab計算軟件[9],基于蟻群算法最優模型的求解采用基本蟻群算法[5,8,10]的實現步驟如下:
step1:參數的初始化。時間t=0,循環次數NC,最大循環次數NCmax,初始化信息素量P,初始時刻Δτij(0)=0,螞蟻數量m,目標點數n;
step2:循環次數Nc隨著循環發生而自增:Nc=Nc+1;
step3:初始禁忌表索引號k=1;
step4:螞蟻的編號隨循環而自增k=k+1;
師:孩子們,知道五月份的第二個星期日是什么節日嗎?(生:母親節)我給我的媽媽送了兩份禮物。(出示課件:包包326元 絲巾235元)
step5:根據狀態轉移概率公式計算的概率決定螞蟻個體選擇的目標點j;
step6:將第j個偵察點添加到禁忌表中;
step7:判斷集合C中偵察點是否遍歷完全,即判斷k step8:根據本文第一部分的信息素更新公式更新每條路徑上的信息量。 step9:查看循環次數是否滿足條件Nc≥NCmax,若是,則結束程序并輸出計算結果,否則清空禁忌表并跳轉到step2。(結果見圖3,黑色圓為敵威脅區域) 圖3 基于蟻群算法最優模型的航路 4.2 基于最短路徑的規避風險算法的模擬 基于最短路徑的風險規避模型的求解步驟如下: step1:規避運算參數的初始化。最優路徑Shortest_Route,每段規避排除的最小距離best_distance,導彈火力半徑R,每段路徑多出的距離bonus; step2:對兩兩偵察點之間的路徑進行判斷,觀察是否存在威脅的影響,若威脅圓心到路徑的距離小于R,且其垂點在路徑上,則有影響,反之,危險點到路徑的距離大于等于R,無影響; step3:有影響時,規避風險,按照給出的最短路徑結論處理,獲得新的最小路徑,并獲得最小距離best_distance,減去兩偵察點的距離得到每段路徑多出的距離bonus; step4:無影響時,不作處理,依照原路徑; step5:循環完畢時,風險規避完畢,威脅得到排除,畫出規避后的最優航跡仿真圖; step6:輸出新的最短路徑距離New_Shortest_Length,其值的得到途徑為:把sum(bonus)+Shortest_Length即得到。(結果見圖4,圓兩個切點間的一部分弧線作為航路使用) 圖4 基于最短路徑的規避風險模型的航路 本文在蟻群算法智能優化的基礎上,建立了基于最短路徑的風險規避模型,得到了滿足決策者風險要求的最優飛行方案,并進行了模擬仿真,顯示了良好的規避風險效果,在整體上,滿足了無人機航路安全、高效,經濟的要求。 本文的威脅區域為導彈分隊,實際上,天氣帶來的風云雨霧區域也是無人機飛行的威脅,且此時的區域不再是規則的圓面,更不規則的區域的情況下,最優的航路也是存在的,求解方法的困難也會提升不少,這也是本文下一步的研究方向。 [1] 錢立志,汪衛華.無人機作戰運用[M].北京:解放軍出版社,2011. [2] 都基焱.無人機兵器原理[M].北京:解放軍出版社,2005. [3] 孫力娟,王良俊,王汝傳.改進的蟻群算法及其在TSP中的應用研究[J].通信學報,2004,25(10):111-116. [4] 陳宏建,陳峻,徐曉華,等.改進的增強型蟻群算法[J].計算機工程,2005,31(2):176-178. [5] 孔令軍,張興華,陳建國.基本蟻群算法及其改進[J].北華大學學報(自然科學版),2004,5(6):572-574. [6] 葉文,范洪達.基于改進蟻群算法的飛機低空突防航路規劃[J].飛行力學,2004,22(33):35-38. [7] 丁建立,陳增強.遺傳算法和螞蟻算法的融合[J].計算機研究與發展,2003,40(9):1351-1356. [8] Dorigo M,Gambardella L M.Ant colony system: A cooperative learning approach to the traveling salesman problem[J].IEEE Trans.Evolutionary Computation,1997,1(1):53-66. [9] 趙靜,但琦.數學建模與數學實驗[M].第3版.北京:高等教育出版社,2008. [10] 洪玉振.TSP最短路徑的必要條件初探[J].河海大學學報,2006,9(6):717-720. Application of Artificial Intelligence Method in Unmanned Aerial Vehicle’s Route Design WAN Yejun1LI Weibing2 (1.Petty Officer Academy of Armament,Wuhan 430208)(2.Army Officer Academy,Hefei 230031) Based on the artificial intelligent optimization of the ant colony algorithm,an avoid risk model based on the shortest path algorithm is established.Mathematical geometry principle is used let preliminary scheme have second optimization.At last,a optimal flight plan which can satisfy given risk demand is obtained.And based on the Matlab software,Matlab code realizes the writer’s thinking design,and its computer simulation and calculation process also has received the good effect. artificial intelligence,ant colony algorithm,flight route design,UAV 2014年8月3日, 2014年9月27日基金項目:武器裝備軍內科研項目基金(編號:012043)資助。 萬業軍,男,助理工程師,研究方向:無人機指揮控制。李偉兵,男,碩士研究生,助理工程師,研究方向:優化理論與方法。 V279 10.3969/j.issn1672-9730.2015.02.018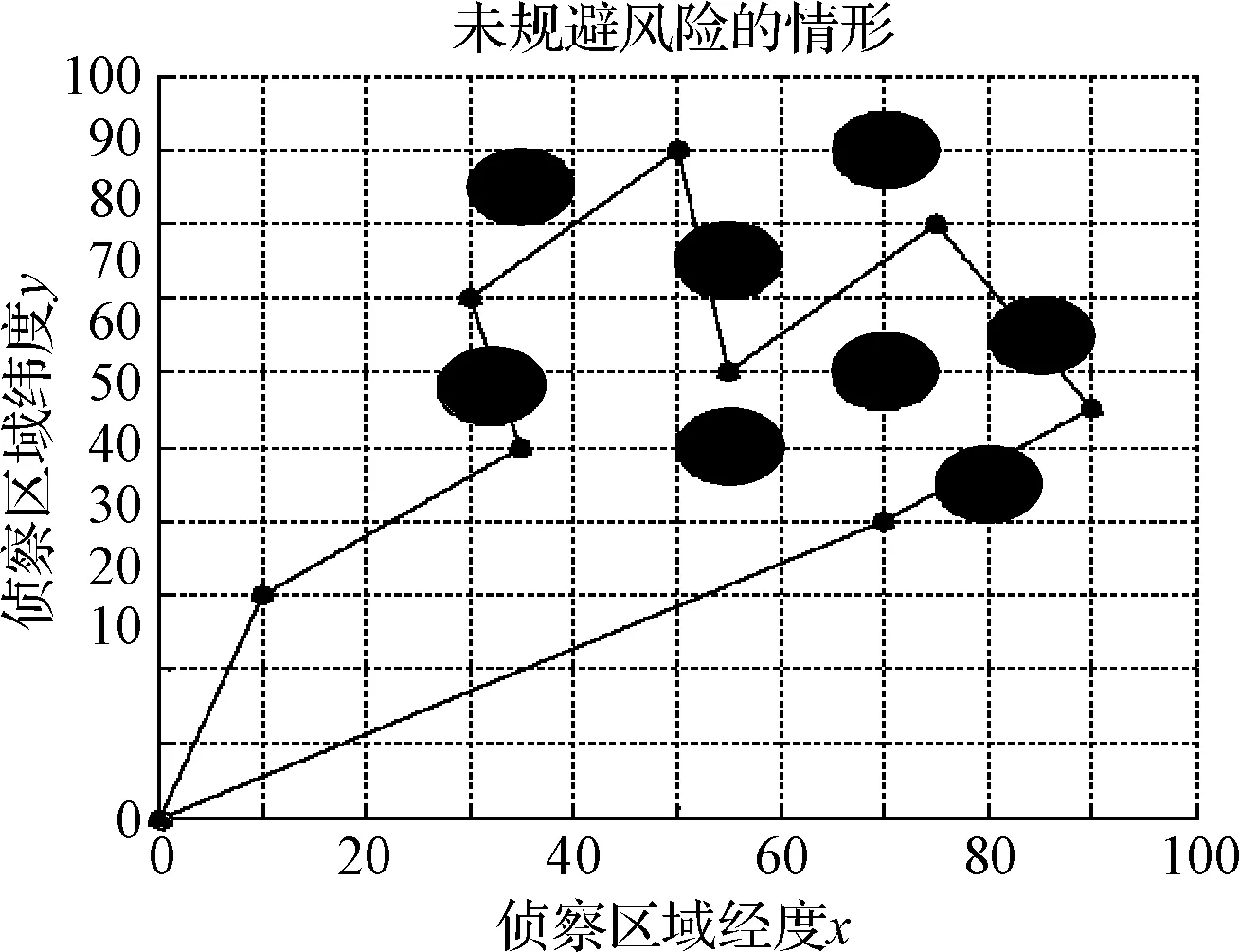

5 結語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
西安航空學院學報(2022年2期)2022-07-04 07:45:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
光學精密工程(2016年6期)2016-11-07 09:07:19
南風窗(2016年19期)2016-09-21 16:51:29
南風窗(2016年19期)2016-09-21 04:56:22