兩站測向交叉定位相對誤差幾何稀釋度研究*
2015-03-15 02:42:11王國剛
艦船電子工程 2015年12期
王國剛
(海軍駐連云港七一六所軍事代表室 連云港 222061)
?
兩站測向交叉定位相對誤差幾何稀釋度研究*
王國剛
(海軍駐連云港七一六所軍事代表室 連云港 222061)
針對工程中使用相對誤差幾何稀釋度衡量定位精度的問題,論文以相對誤差幾何稀釋度為研究對象,分析兩站測向交叉定位原理,給出了傳感器測角誤差不同時,相對誤差幾何稀釋度最小的傳感器探測角度與測角誤差關系,并討論了傳感器測角誤差相同時,相對誤差最小的平臺最優布站方式。通過Matlab仿真,驗證了傳感器測角誤差相同時結論的正確性。
交叉定位; 定位精度; GDOP; 相對誤差; 最優布站
Class Number TN957
1 引言
與有源探測相比,無源探測不向目標發射電磁波,具有抗干擾性強,隱蔽性好和作用距離遠的優點,隨著測量技術、信息截獲和處理技術的逐漸發展,無源探測在電子戰系統中占據越來越重要的位置。常用的無源探測技術包括利用測量目標信號到達角度的測向交叉定位法和利用到達時間差的時差定位法,由于被動探測設備對目標的測量數據變化比較慢,變動范圍比較小,因而方位信息是最可靠的輻射源參數之一。而大氣波導情況比較復雜,俯仰角測量誤差較大,所以只采用方位角進行定位相對穩定[1~3]。
測向網通常由若干個配置在不同位置的站臺組成,每個探測平臺可觀測性有限很難獨立實現對目標準確定位,往往設置多站進行聯合測向,并由一個中心站接收數據在地圖上進行交叉定位。根據工程需求,本文應用相對誤差幾何稀釋度衡量定位精度,通過分析給出兩被動雷達探測精度不同及相同條件下定位精度最高的條件,討論探測精度相同時平臺最優布置,使平臺運動更加機動,增強平臺布站的靈活性,對測向網合理優化配置研究具有重要意義。
2 兩站測向交叉定位原理
設兩個觀測站的位置為(x1,y1)、(x2,y2),目標位置位于T(x,y)點,所測量得到的角度為θ1和θ2,兩條方向的射線交于一點,該點即為目標的位置[4],如圖1所示。
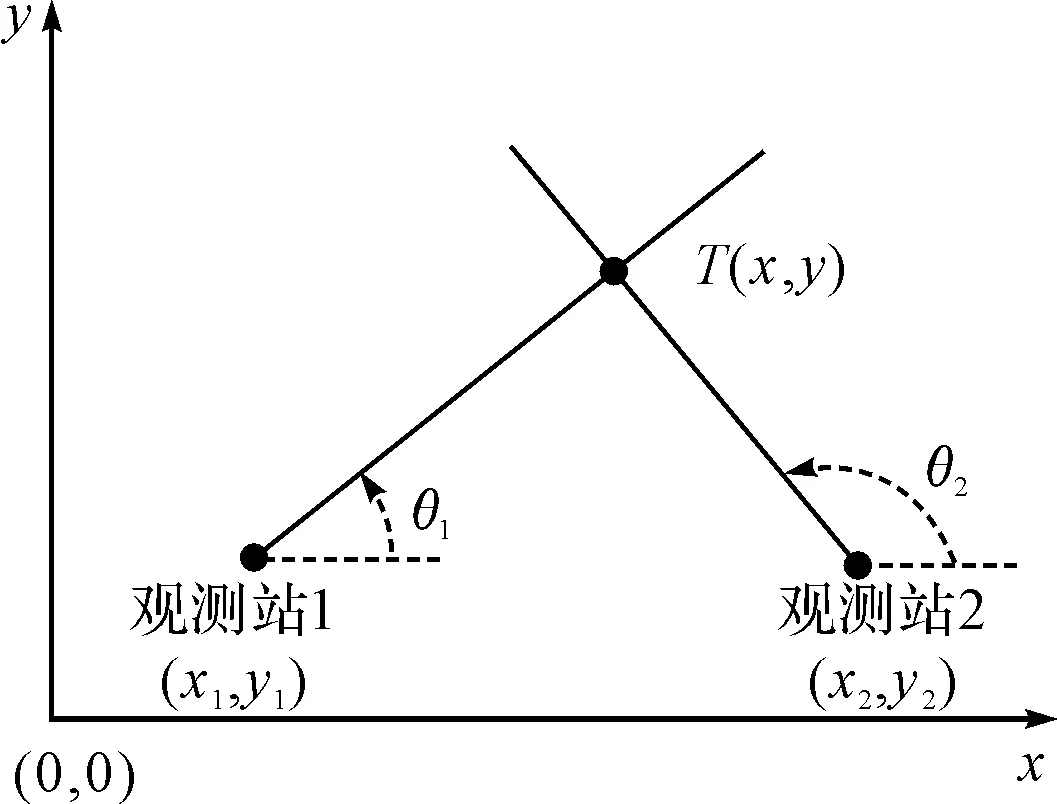
圖1 兩站測向交叉定位原理示意圖
忽略兩測向站坐標軸指向誤差(即認為三個坐標軸分別平行),根據角度定義可得:
(1)
整理為
(2)
矩陣表示為
AX=Z
(3)
式中:
該算法忽略了地球曲率及兩測向站坐標軸指向誤差,兩站距離較近時,誤差較小可以忽略;但當兩站距離較遠時,誤差較大,需進行相應的坐標變換修正[5]。
如果測量過程中沒有誤差,兩站測向線在空間中交于一點,然而測量過程中總會存在誤差,這些誤差對位置估計的影響體現在方位線不再交于一點。如果測量誤差是隨機的,測得的方位角可能比實際方位角大,也可能比實際方位角小,從而形成一個誤差橢圓。傳感器中還可能存在測量偏差問題,即系統誤差可以通過標校方法消除,因而隨機測量誤差對定位誤差影響較大[6~9]。假定兩站測角誤差δθ1、δθ2服從均值為0的高斯分布,兩站之間的測角誤差相互獨立。
分析測向定位誤差,對式(2)求偏導,整理可得
(4)
寫成矩陣形式為
AδX=B
(5)
其中:
故可以得:
δX=A-1B=T·B
(6)
令:

B1=(x-x1)sec2θ1,B2=(x-x2)sec2θ1
故式(6)又可寫為
(7)
得到協方差矩陣為
(8)
其中:
3 相對誤差幾何稀釋度分析
交叉定位算法的性能通常用誤差幾何稀釋度(geometric dilution of precision,GDOP)來評估。GDOP是目標估計位置的均方根誤差同量測均方根誤差的比值,能夠反映傳感器與目標間的相對幾何位置對量測誤差的放大關系。這一方面表明傳感器與目標間的相對幾何位置能夠對目標的估計位置產生影響;另一方面,不同的傳感器與目標間的相對幾何位置會產生不同的定位精度。因此,GDOP能夠將各傳感器與目標間的相對幾何位置同定位精度聯系在一起,并能夠準確衡量前者對后者的影響程度。目前很多文獻僅用目標位置的均方根誤差表示GDOP。
通常有兩種方式描述定位精度的GDOP曲線:二維平面內的等值線圖及三維立體曲線,前者是后者在二維平面內的投影。一般等值線圖描述GDOP的變化趨勢,而立體圖直觀表示GDOP在整個觀測區域內的總體結構。對于兩站無源探測系統而言,GDOP三維立體曲線是在雙站基線區域含有凸起且總體類似于馬鞍面的結構,這些不能在二維等值線中得到反映[10]。
工程應用中,被動雷達常用相對誤差幾何稀釋度ΔGDOP(%)作為指標衡量定位精度,即
(9)

(10)
根據:
代入式(10)可得:
(11)
式中:r1和r2分別為目標到兩個測向站間的距離。
式(11)表明測向交叉的定位誤差等于測向線交叉區域的多邊形邊長平方和除以其夾角的正弦,如圖2所示。
假設兩站的測角精度σθ=σθ1,σθ2=mσθ1,參考坐標系的原點選擇為兩個站A1,A2連線的上O,x軸為兩個站連線方向,y軸符合右手法則。
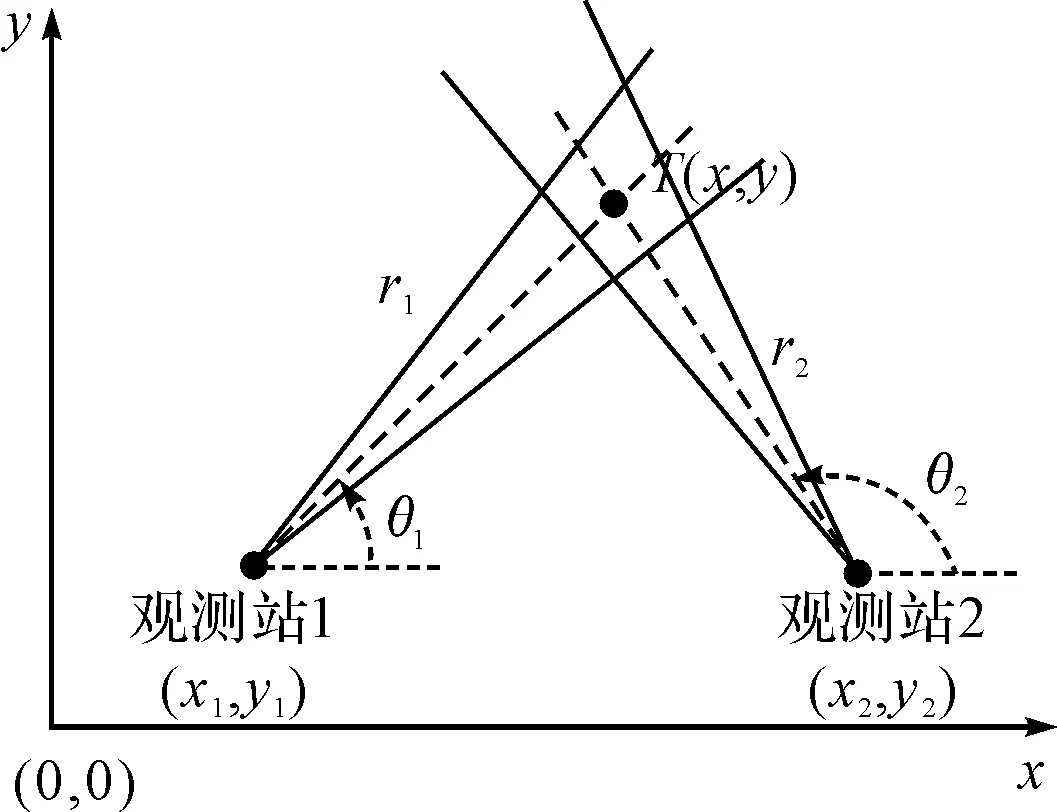
圖2 測向交叉定位誤差區域示意圖
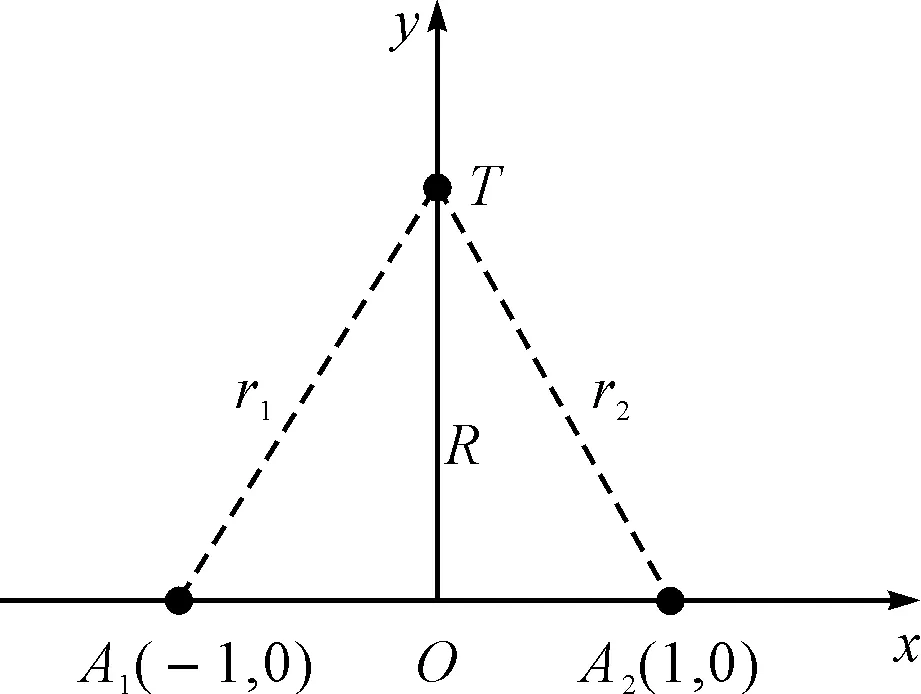
圖3 測向交叉定位示意圖
將式(11)簡化得:
(12)
由于
(13)
式中:R為目標到達兩個測向站基線的距離。
將式(13)代入式(12)中可得:
(14)
則:
(15)
由式(15)可知,相對誤差幾何稀釋度與傳感器的精度、平臺布站方式等有關。
4 相對誤差幾何稀釋度與布站關系分析
為了便于分析,令:
(16)
比較式(15)和式(16),可知ω與ΔGDOP具有相同的單調性,并且當ω取最小值時,ΔGDOP也取最小值[11]。
(17)
(18)
式中:
α=(θ1-θ2)
如果在某一個θ1和θ2取得最小值,必然滿足以下極值條件:
(19)
則:
(20)
以0≤θ1≤π/2為例,因為輻射源目標不在基線或延長線上,所以θ1≠θ2且θ1≠0,θ2≠0。
(21)
整理得:
(22)
式(22)為兩傳感器探測誤差不同時相對誤差幾何稀釋度最小的條件。由于式(22)無法得出平臺布站與探測角的直接關系,因此討論m=1,即兩平臺探測誤差相等σθ=σθ1=σθ2時相對誤差幾何稀釋度與平臺布站關系。
當θ1=π-θ2,兩條測向線交叉成為一個等腰三角形,交點在y軸上,則最優的定位精度在x=0處獲得。
設兩站連線中心為原點,目標位于兩站連線的中間位置,θ1=π-θ2=θ,代入式(15)中可得:
(23)
當sin2θcosθ取得最大值時,ΔGDOP取得最小值。sin2θcosθ對于θ求導并令其等于0,可得
(24)
故目標位于兩站連線的中間位置,且與兩站夾角約為70.6°時,測向交叉定位的相對誤差幾何稀釋度最小。
5 仿真驗證與分析
為了驗證兩站傳感器探測誤差相同時,相對誤差幾何稀釋度最小條件,仿真實驗設置目標位于兩探測平臺中線上,與基線距離29km,平臺以10m/s的速度從(300km,0)運動至(0km,0),方位探測誤差為1°,則交叉定位角與相對誤差幾何稀釋度關系如圖4所示。
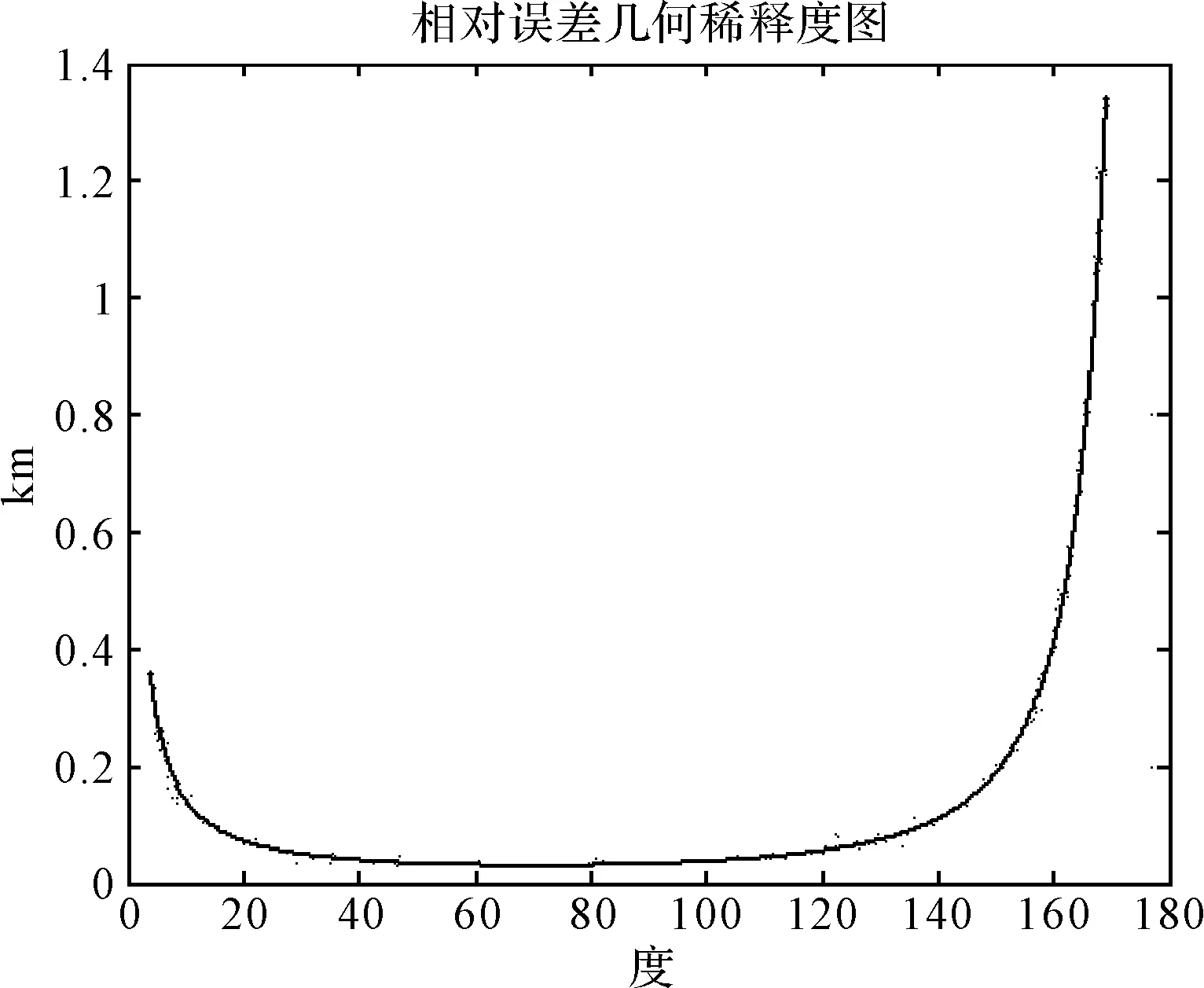
圖4 方位探測誤差1度時定位角與ΔGDOP關系圖
由圖4可以看出,當目標位于兩探測平臺中間位置,交叉定位角0°~20°時,ΔGDOP遞減,在30°~110°間ΔGDOP變化平緩,大約70°時,ΔGDOP最小。當交叉定位角大于120°時,即輻射源目標靠近基線時,ΔGDOP增大。
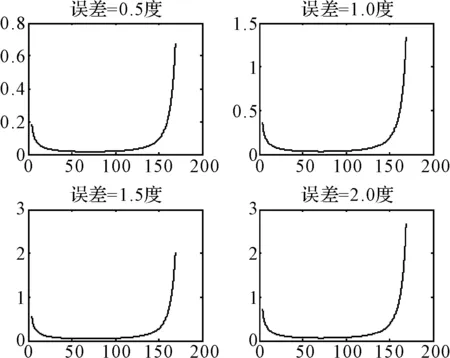
圖5 方位探測誤差不同時定位角與ΔGDOP關系圖
考慮到傳感器探測誤差大小對ΔGDOP的影響,仿真實驗設置目標位于兩探測平臺中線上,與基線距離29km,平臺以10m/s的速度從(300km,0)運動至(0km,0),方位探測誤差分別為0.5°、1.0°、1.5°、2.0°時交叉定位角與相對誤差幾何稀釋度ΔGDOP關系如圖5所示。
由圖5可以看出,隨著方位探測誤差增大,ΔGDOP值增大。雖然方位探測誤差不同,但隨著交叉定位角增大,ΔGDOP呈先減后增趨勢,當交叉角大約70°時,ΔGDOP最小。當輻射源目標在基線位置時,ΔGDOP最大。
6 結語
本文在工程中使用相對誤差幾何稀釋度衡量定位精度的需求下,詳細闡述了兩站測向交叉定位原理并分析相對誤差幾何稀釋度,給出傳感器探測誤差相同和不同時相對誤差最小條件及傳感器探測誤差相同時平臺最優布站方式。仿真實驗表明方位探測誤差越大,相對誤差幾何稀釋度越大,同時傳感器探測誤差相同,輻射源目標位于兩站連線的中間位置,且與兩站夾角約為70.6°時,定位的相對誤差幾何稀釋度最小。本文研究用于兩觀測站對輻射源目標測向定位時,指導平臺相對目標合理機動提高定位精度,為輔助指揮員生成協同探測方案提供理論和技術支撐。
[1] Levanon N. 2D條件下的最小GDOP[J]. IEEE Proc.雷達,聲納,2000,147(3):149-155.
[2] Ivan K.傳感器融合最優幾何布置[C]//SPIE會議信號處理部分,傳感器融合與目標識別,Florida,1998:74-78.
[3] Torrieri D J.被動定位系統統計理論[J]. IEEE Trans on AES,1984,AES-20(2):183-197.
[4] 孫立杰,馬中,陳世友,等.無源交叉定位算法的原理誤差比較與分析[C]//第四屆信息融合大會論文集,2012:163-166.
[5] 修建娟,何友,王國宏,等.測向交叉定位系統中的交會角研究[J].宇航學報,2005,26(3):282-286.
[6] Richard A. Poisel.電子戰目標定位方法[M].北京:電子工業出版社,2008:167-168.
[7] 周亦軍,李旻,李銳.純方位定位中觀測站布局優化研究[J].艦船電子工程,2010,30(11):69-71.
[8] 劉忠.純方位目標運動分析[M].北京:國防工業出版社,2009:56-66.
[9] 王本才,王國宏,何友.多站純方位無源定位算法研究進展[J].電光與控制,2012,19(5):56-60.
[10] 李興民,李國君,李健,等.雙站交叉定位雷達布站方法研究[J].雷達科學與技術,2011,9(5):405-408.
Relative Geometric Dilution of Precision in Double Station Bearing-only Location
WANG Guogang
(Navy Representative Office in 716 Research Institute in Lianyungang, Lianyungang 222061)
According to the positioning accuracy measured by the relative GDOP in engineering, the paper takes the relative GDOP as the research project and analyzes the double station bearing-only principle. Adopting the minimum relative GDOP as prerequisite, the paper deduces the relationship of the sensor detection angle and angle error on the condition of different angle errors, discusses the optimal placement of the platform on the condition of the same angle errors. Further on, the Matlab simulation result verifies the conclusion on the condition of the same angle errors.
bearing-only, positioning accuracy, GDOP, relative error, optimal placement
2015年6月3日,
2015年7月26日
王國剛,男,工程師,研究方向:作戰系統試驗評估方法。
TN957
10.3969/j.issn.1672-9730.2015.12.016