臨場感遙操作機器人系統中的虛擬動力學檢測算法
2015-03-15 08:23:32劉永浩
新技術新工藝 2015年12期
劉永浩,王 鵬,王 霞
(西安工業大學 體育學院,陜西 西安 710032)
?
臨場感遙操作機器人系統中的虛擬動力學檢測算法
劉永浩,王鵬,王霞
(西安工業大學 體育學院,陜西 西安 710032)
摘要:分析了臨場感遙操作機器人系統組成及工作原理,并以虛擬力以接觸性碰撞動力學檢測為例,提出了FV接觸式中虛擬力的檢測算法。該算法考慮了慣性、阻尼系數及彈性系數,并指出虛擬交互力是FV接觸式中虛擬力的矢量和。選取臨場感遙操作機器人系統對該算法進行了驗證,分析了物體的位移及作用力的大小。試驗結果表明,虛擬力fspan和主手力fspan、從手力fspan基本一致,該算法的精確度較高,并且具有可行性。
關鍵詞:臨場感遙操作機器人;虛擬動力學檢測算法;虛擬力
隨著海洋技術、原子能技術及空間技術的不斷發展,人類經常會遇到一些極端的工作的環境,如高溫、窒息、強輻射和高壓等,而遙操作機器人[1]能夠替代人類直接在這種環境中工作,因而,其研究成為熱點。目前,對于遙操作機器人的研究,日本、前蘇聯和美國等也取得了一系列的研究成果[2-3]。利用臨場感遙操作機器人系統,可以實現交互工作方式,使操作者感知現場工作情況,提高系統的工作性能。
隨著科學技術的發展,將遙操作機器人和臨場感技術結合在一起,以原有遙操作機器人系統為基礎,引入視覺反饋和力反饋,形成雙向控制遙操作系統,充分發揮人和機器人的特長。機器人和人實現交互工作,人的決策能力和判斷能力可以提高系統的智能水平,使遙操作機器人能夠更好地完成極端環境之下的操作任務;但是引入力與視覺反饋易導致出現系統的時延及各種擾動誤差,從而降低了反饋信號的實時性和真實性。隨著計算機圖形學及相關技術的快速發展,虛擬現實技術被應用到遙操作機器人系統中,逐漸成為解決時延問題的主要手段之一。本文主要分析臨場感遙操作機器人系統中的虛擬動力學檢測算法。
1臨場感遙操作機器人系統組成及工作原理
1.1組成
臨場感遙操作機器人系統主要分為機器人操作端及機器人執行端兩部分(見圖1),具體包括異構主從機械手部分、視覺臨場感子系統、雙向伺服控制子系統及網絡通信子系統等4個部分。

圖1 臨場感遙操作機器人系統組成
1.2工作原理
現場操作人員通過力反饋操作對機器人的工作進行現場指導,機器人上安裝了位移傳感器、攝像機、工作阻力及測量機械手抓取力。視頻系統通過無線通信模塊獲得工作現場的圖像并傳輸到監視器屏幕上,為操作者提供視覺反饋。通過對反饋力的操作,可以對工作阻力及被抓取物體的軟硬程度做出判斷。該遙控機器人系統具備主動臂和從動臂雙向力反應,操作者直接對主動臂進行操作,從動臂跟隨主動臂的操作完成一系列的操作任務,通過從動臂的約束反力的實時回傳,使操作者對從動臂有真實的力感覺,從而可以使操作更加精細。
2虛擬環境中的交互動力學檢測
2.1接觸性碰撞動力學檢測算法
本系統的虛擬機械手接觸性碰撞檢測主要包括2個步驟:1)對立體包圍盒相交進行測試,看虛擬手與環境是否發生碰撞,如果兩包圍盒交集為空,則一定不會發生碰撞現象;2)如果確定碰撞之后,則對虛擬手多邊形和環境多面體之間的碰撞進行精確檢測。進行碰撞檢測時,判定待操作對象是否被抓住或者產生位移的主要依據是虛擬手的運動方向和包圍盒的接觸面;此外,機械手抓取物體或者是劃過物體的過程中,一定會有物體沿著受力的方向發生移動。接觸判定的空間范圍如圖2所示。

圖2 接觸判定的空間范圍
在圖形仿真中,如果圖形機械手內側抓取物體接觸時,物體的相應移動是通過抓手指尖與待操作對象各表面的關系來實現。圖形機械手接觸物體時,為了判定虛擬物體是否受力,是否出現虛擬移動,通常會采用一組平面來近似抓手的外緣輪廓,對抓手外緣面與待操作對象各表面的碰撞關系進行判斷。這一精確碰撞檢測是建立在抓手和物體的包圍盒碰撞檢測的基礎上的,它的實現過程是首先進行抓手外緣的每個面與物體包圍盒的碰撞檢測,然后對發生碰撞的外緣面與物體的每個相應的表面進行精確的接觸檢測。抓取過程屬于面—頂點接觸式,即FV接觸式。
當虛擬手抓取物體和物體接觸時,假定被抓取的物體的慣性質量為ijkmve,阻尼系數為ijkbve,彈性系數為ijkkve,在機械手抓取物體時,物體會以接觸點為原點發生位移,接觸表面的法向矢量為zi。


圖3 FV接觸模式作用力的側視圖
若將zt變換到模型世界坐標系中的變形矢量,則在發生FV接觸并僅考慮變形矢量rvelt時,某一物體受到的相互作用力矢量FVfvei可表達為:
(1)
式中,ijkmve代表3×3慣性質量矩陣;ijkbve代表阻尼系數矩陣;ijkkve代表彈性系數矩陣,可用式2表示:
(2)
式中,I為3×3單位矩陣。
2.2接觸式碰撞中虛擬動力學合成檢測算法

(3)
式中,n為接觸狀態下包含FV基本接觸的數目。
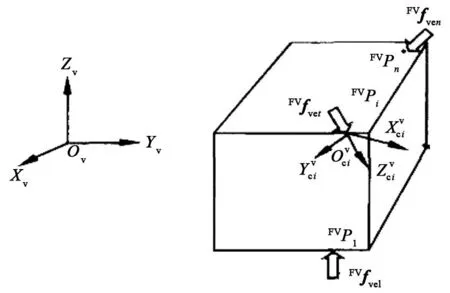
圖4 物體受力圖

(4)
在同時考慮變形矢量rveli,rvelj和位移rve2的情況下,該物體受到的總力矢量為:
(5)
(6)

(7)
則式6為:
(8)
3試驗分析
試驗系統的主端和從端位于2個不同的實驗室中,其兩端計算機之間的網絡通信通過局域網TCP/IP協議實現,傳輸的信息包括反饋信息和控制信息,每組控制信息的字節數為16 kb,每組反饋信息的字節數為20 kb,由于時延的累積是毫秒級的,因此,對操作速度的影響不大。選擇的試驗系統其硬件設備組成結構如圖5所示。

圖5 試驗系統硬件組成
試驗中被抓取的物體質量、阻尼系數和彈性系數分別為m=0.37 kg,k=1 223 N/m,b=325 N·s/m。試驗結果分別如圖6~圖8所示。隨著機械手的運動,機械手和被碰撞物體的受力情況也隨著發生改變,系統檢測到的虛擬力fv和主手力fm、從手力fs基本一致,說明所給出的檢測算法是可行的。

圖6 機械手運動位移

圖7 機械手與環境碰撞接觸力

圖8 物體受力情況分析
4結語
在遙操作機器人中引入視覺臨場感技術之后,這一領域的研究進入了一個新時代。由于機械手在抓取物體時存在虛擬力,因此,對虛擬力進行研究,可以提高機械手抓取物體的精確性。本文提出的虛擬力檢測算法,對于人機接口的設計具有非常重要的參考價值,使該系統向著更加智能化、極限化及完整化的方向發展。
參考文獻
[1] 宋愛國,柯欣,潘禮正.力覺臨場感遙操作機器人(2):操作者的輸入輸出特性建模[J].南京信息工程大學學報:自然科學版, 2013(2):97-105.
[2] 朱猛.基于虛擬現實的臨場感遙操作工程機器人系統研究[D].長春:吉林大學,2008.
[3] 宋愛國,倪得晶.力覺臨場感遙操作機器人(4):系統的操作性能評價[J].南京信息工程大學學報:自然科學版, 2014(3):211-220.
責任編輯鄭練
The Virtual Dynamics Detection Algorithm of Teleoperation Robot System
LIU Yonghao, WANG Peng, WANG Xia
(School of Physical Education, Xi’an Technological University, Xi’an 710032, China)
Abstract:Analyze the teleoperation robotic system components and working principle, and take the virtual force to contact the collision dynamics detection as an example, propose a virtual force FV-contact detection algorithm which takes into account inertia, damping and elasticity. The virtual interaction FV contact force is the vector sum of the virtual force. Finally select teleoperation robot system to verify the algorithm to analyze the size of the displacement and the force of objects. The results show that virtual force fspan, master hand power fspanand consistent from practicing hand fspanare about the same, and the algorithm is feasible in high accuracy.
Key words:teleoperation robot, virtual dynamics detection algorithm, virtual force
收稿日期:2015-08-21
作者簡介:劉永浩(1977-),男,碩士,講師,主要從事體育工程學、體育教學與訓練等方面的研究。
中圖分類號:TP 242.2
文獻標志碼:A