基于CAN總線的煤礦井下水情監(jiān)測通信系統(tǒng)
2015-03-19 13:27:34張宏濤
機(jī)械管理開發(fā) 2015年2期
張宏濤
(1.晉城無煙煤礦業(yè)集團(tuán)有限責(zé)任公司,山西 晉城 048006;2.太原理工大學(xué),山西 太原 030024)
引言
現(xiàn)在,國內(nèi)煤礦主要采用RS485信息傳輸系統(tǒng)作為礦井水情監(jiān)控系統(tǒng),該系統(tǒng)的監(jiān)控底層設(shè)備之間無法進(jìn)行信息溝通,這跟它以主從式體系結(jié)構(gòu)組成、采用時(shí)分制通訊為主流技術(shù)不無關(guān)系。由于傳輸速度的限制,礦井水情監(jiān)控系統(tǒng)的實(shí)時(shí)性一直未能很好的解決。水情監(jiān)測具有分布分散、情況各異、變化復(fù)雜的特點(diǎn),這個(gè)技術(shù)難題一直困擾著安全生產(chǎn)。
在水情監(jiān)測技術(shù)發(fā)展方面,地面已有的技術(shù)對推動(dòng)煤礦井下水情監(jiān)測具有重要的指導(dǎo)作用,主要研究包括:文獻(xiàn)[1]研究了基于RS485總線的分布式水位監(jiān)測系統(tǒng),利用RS485網(wǎng)絡(luò)構(gòu)建分布式水位監(jiān)測系統(tǒng),并對其軟硬件及通信接口設(shè)計(jì)作了較為詳細(xì)的介紹,具有建設(shè)簡單、成本低廉、質(zhì)量可靠、通信距離遠(yuǎn)等優(yōu)點(diǎn)。文獻(xiàn)[2]研究了基于GPRS技術(shù)的現(xiàn)代化水情監(jiān)測調(diào)度系統(tǒng),應(yīng)用GPRS數(shù)據(jù)終端,綜合互聯(lián)網(wǎng)技術(shù)和移動(dòng)無線傳輸技術(shù),最終達(dá)到水情監(jiān)測的無線化和自動(dòng)化。文獻(xiàn)[3]研究了嵌入式水情自動(dòng)監(jiān)測終端,對水位以CDMA無線通訊方式傳送給中心站的系統(tǒng)主機(jī),主機(jī)對數(shù)據(jù)進(jìn)行處理后發(fā)出準(zhǔn)確命令,不僅能大大提高效率,也有助于國家水利部門了解水資源情況,為防洪減災(zāi)和水資源建設(shè)提供很好的依據(jù)和支持。文獻(xiàn)[4]研究了基于GSM 短消息的水情實(shí)時(shí)監(jiān)測系統(tǒng)。該系統(tǒng)由數(shù)據(jù)采集子系統(tǒng)和監(jiān)測中心子系統(tǒng)組成,利用水位傳感器實(shí)時(shí)監(jiān)測水情的變化,由數(shù)據(jù)采集子系統(tǒng)的GSM MODEM以短消息的方式將當(dāng)前的實(shí)時(shí)水情數(shù)據(jù)發(fā)送到水情監(jiān)測中心和相關(guān)管理人員手機(jī),以便及時(shí)處理。
因此設(shè)計(jì)能有效應(yīng)用于煤礦井下的所有工作環(huán)境,隨時(shí)采集能最直接反應(yīng)水文信息的變化的信息,最終達(dá)到水情實(shí)時(shí)監(jiān)控的目的,對超前預(yù)測水文災(zāi)害具有重要的意義。
1 CAN總線通信介紹
隨著計(jì)算機(jī)硬件、軟件技術(shù)及集成電路技術(shù)的迅速發(fā)展,作為計(jì)算機(jī)控制領(lǐng)域的一個(gè)分支,工業(yè)控制系統(tǒng)的發(fā)展一日千里,為了適應(yīng)技術(shù)需求,分布式工業(yè)控制系統(tǒng)逐步發(fā)展起來。這類技術(shù)將微處理器作為控制核心,屬于將5C技術(shù)緊密結(jié)合的產(chǎn)物,融合了計(jì)算機(jī)、自動(dòng)控制、通信、顯示技術(shù)和轉(zhuǎn)換技術(shù)。它具有廣泛的適用范圍和良好的可擴(kuò)展性,方便維護(hù),可靠性和抗故障能力也表現(xiàn)突出。因此,相對于單一儀表控制系統(tǒng)和集中型計(jì)算機(jī)控制系統(tǒng)其具有不可忽視的優(yōu)越性。
現(xiàn)場總線技術(shù)已逐漸成為自動(dòng)化通信領(lǐng)域研究的熱點(diǎn)之一。它的出現(xiàn)為提高分布式控制系統(tǒng)的通信實(shí)時(shí)性和可靠性提供了技術(shù)支撐。CAN(Controller Area Network)屬于控制局域網(wǎng),與RS485類似,也是一種分布式控制或?qū)崟r(shí)控制系統(tǒng)中常用的串行通信網(wǎng)絡(luò)。控制器局部網(wǎng)是BOSCH公司為現(xiàn)代汽車應(yīng)用領(lǐng)先推出的一種多主機(jī)局部網(wǎng),由于其性能優(yōu)越,已逐步在汽車業(yè)、醫(yī)療領(lǐng)域、建筑行業(yè)、機(jī)電一體化等控制領(lǐng)域得到了推廣和應(yīng)用。1991年9月,PHILIPS半導(dǎo)體公司制訂并且發(fā)布了有關(guān)CAN總線的技術(shù)規(guī)范(CAN VERSION2.0)。該規(guī)范分為 A、B兩部分。2.0A主要敘述了1.2版本規(guī)范中具體定義的CAN報(bào)文格式,而2.0B重點(diǎn)定義了適用于CAN總線的標(biāo)準(zhǔn)和擴(kuò)展兩種數(shù)據(jù)幀格式。之后,1993年11月國際標(biāo)準(zhǔn)化組織正式頒布了ISOll898標(biāo)準(zhǔn),該標(biāo)準(zhǔn)進(jìn)一步促進(jìn)了高速通信控制器局部網(wǎng)(CAN)的推廣與應(yīng)用。CAN協(xié)議涵蓋的開放式系統(tǒng)互聯(lián)基本上按照模型中的傳輸層、數(shù)據(jù)鏈路層及物理層設(shè)計(jì)。其中關(guān)于ISO/OSI基本上按照模型中的傳輸層、數(shù)據(jù)鏈路層及物理層。
CAN總線在信息發(fā)送控制、系統(tǒng)兼容性、通信速度及錯(cuò)誤控制等方面都有不同于傳統(tǒng)總線的特點(diǎn)。在信息發(fā)送機(jī)制方面,CAN總線采用多主控制模式,當(dāng)總線沒有執(zhí)行收發(fā)動(dòng)作時(shí),所有的網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)都可開始發(fā)送消息,當(dāng)然,發(fā)送權(quán)由誰獲得取決于發(fā)送的先后順序。系統(tǒng)中多個(gè)網(wǎng)絡(luò)節(jié)點(diǎn)同時(shí)發(fā)送數(shù)據(jù)時(shí),信息中包含較高優(yōu)先級ID的發(fā)送節(jié)點(diǎn)可獲得發(fā)送權(quán)。根據(jù)CAN標(biāo)準(zhǔn)定義,所有網(wǎng)絡(luò)內(nèi)的消息都以約定不變的幀格式傳輸。當(dāng)總線空閑時(shí),所有節(jié)點(diǎn)都可以發(fā)送新報(bào)文。多個(gè)節(jié)點(diǎn)遭遇發(fā)送沖突時(shí),根據(jù)標(biāo)識符決定報(bào)文的優(yōu)先級。ID并非代表發(fā)送的目的地址,而是象征著正在所發(fā)消息的優(yōu)先等級。當(dāng)同時(shí)有兩個(gè)以上的數(shù)據(jù)節(jié)點(diǎn)開始發(fā)送報(bào)文時(shí),將由控制器對各消息ID的進(jìn)行逐位仲裁。優(yōu)先級最高的節(jié)點(diǎn)可繼續(xù)發(fā)送報(bào)文,優(yōu)先級較低的則立刻停止發(fā)送,轉(zhuǎn)為接收狀態(tài)。這樣的逐位仲裁機(jī)制能夠保證最大程序的信息完整性和傳輸?shù)目焖傩裕捎行岣呖偩€數(shù)據(jù)的傳輸速率。
2 煤礦井下水情監(jiān)測通信系統(tǒng)架構(gòu)設(shè)計(jì)
分站的通信部分主要由CAN通信網(wǎng)絡(luò)組成,CAN通信采用C8051F040自帶CAN控制器,CAN控制器包含一個(gè)控制局域網(wǎng)核、消息存儲器、一個(gè)消息處理狀態(tài)機(jī)以及控制寄存器。CAN控制器可以工作在高達(dá)1M位/s的位速率。Silicon Labs的CAN有32個(gè)消息對象,每個(gè)消息對象有其自己的標(biāo)識掩碼,通過標(biāo)識掩碼篩選接收到的信息。數(shù)據(jù)、消息對象和標(biāo)識掩碼都存在控制器局域網(wǎng)的消息ROM中。CAN控制器功能強(qiáng)大,可以單獨(dú)處理與數(shù)據(jù)發(fā)送和接收過濾有關(guān)的所有協(xié)議,完全用不到C8051微處理器。這就使得用于CAN通信的處理器帶寬最小。C8051的讀寫數(shù)據(jù)功能都通過特殊功能控制器配置CAN控制器來完成。CAN網(wǎng)絡(luò)典型雙波特率拓?fù)浣Y(jié)構(gòu)如圖1所示。

圖1 CAN網(wǎng)絡(luò)典型多波特率拓?fù)浣Y(jié)構(gòu)圖
監(jiān)控系統(tǒng)采用了分站與主站搭配的主從式系統(tǒng)架構(gòu),分站與主站均配置CAN總線接口,通過CAN總線進(jìn)行信息交換,實(shí)現(xiàn)數(shù)據(jù)共享,主站除了CAN總線接口后還配置了以太網(wǎng)通訊接口,可以兼容100/1 000BASE-T網(wǎng)絡(luò),實(shí)現(xiàn)與工業(yè)環(huán)網(wǎng)對接。每一個(gè)分站都可以查詢到其他另外分站的水位、壓力、水泵狀態(tài),這都依賴于CAN總線數(shù)據(jù)傳輸?shù)目焖傩院涂煽啃浴?/p>
根據(jù)實(shí)地調(diào)研與煤礦井下實(shí)際工況需要,系統(tǒng)準(zhǔn)備安裝10個(gè)監(jiān)控分站和一個(gè)主站。分站分別在3條巷道的10個(gè)水倉位置安裝,以實(shí)現(xiàn)對水倉水位信息、水泵狀態(tài)、報(bào)警狀態(tài)信息的采集。對于水量不是特別大、水位變化不是很頻繁的地方并未安裝水泵,故僅對水位信息進(jìn)行監(jiān)測。主站通過CAN總線接口接收來自各個(gè)分站的反饋信息,然后通過以太網(wǎng)接口將所有信息傳送至地面調(diào)度中心的上位機(jī),來實(shí)現(xiàn)信息總覽和實(shí)時(shí)監(jiān)控。系統(tǒng)總體通訊架構(gòu)設(shè)計(jì)圖如下頁圖2所示。
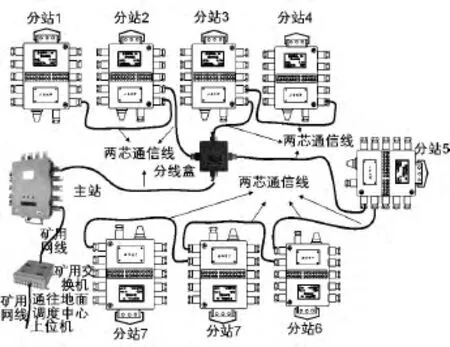
圖2 通信系統(tǒng)架構(gòu)圖
通過實(shí)際測量,本監(jiān)控系統(tǒng)中最遠(yuǎn)的兩個(gè)分站節(jié)點(diǎn)的距離大約4km,對照表1可以看出,本通訊協(xié)議的波特率設(shè)置不宜超過20kbps;因此在適用工業(yè)設(shè)備的應(yīng)用層協(xié)議只能選用CANopen協(xié)議;但是本系統(tǒng)中總線只用于簡單收發(fā)數(shù)據(jù),而CANopen協(xié)議中涉及到通訊模型和對象詞典等復(fù)雜定義,實(shí)現(xiàn)起來較為復(fù)雜,從實(shí)用性和簡易性角度來分析,選擇自己構(gòu)建適合自身系統(tǒng)的通訊協(xié)議。結(jié)合監(jiān)控系統(tǒng)功能,本系統(tǒng)采用主從輪詢的方式搭建通信協(xié)議,幀格式采用標(biāo)準(zhǔn)幀格式,即ID位數(shù)為11,系統(tǒng)站點(diǎn)一共有9個(gè),故設(shè)置ID時(shí),前7位全設(shè)置為1,后4位分別設(shè)置為0x01~0x09,即分站編號為1—8,主站編號為9。通過分析系統(tǒng)功能,可知主站需要向分站發(fā)送21字節(jié)數(shù)據(jù)(請求報(bào)文),而分站需向主站返回17字節(jié)數(shù)據(jù)(響應(yīng)報(bào)文)。但是CAN總線每一幀只能攜帶8字節(jié)的數(shù)據(jù),故主站向分站發(fā)送數(shù)據(jù)時(shí)分3幀進(jìn)行,分站向主站返回?cái)?shù)據(jù)也分3幀進(jìn)行。因此,將CAN協(xié)議每幀中數(shù)據(jù)段的第一個(gè)字節(jié)作為“幀編號字段”,之后的7個(gè)字節(jié)的數(shù)據(jù)才是有效載荷。

表1 CAN總線系統(tǒng)在任意兩節(jié)點(diǎn)之間的最大距離與最大傳輸速率對應(yīng)表
3 結(jié)語
完成了CAN總線搭建,進(jìn)行了通信調(diào)試,驗(yàn)證了數(shù)據(jù)傳輸以及通信的穩(wěn)定性,在調(diào)試過程中不斷改進(jìn)電路結(jié)構(gòu)和軟件結(jié)構(gòu),使整個(gè)系統(tǒng)更加符合現(xiàn)場使用需求。
[1] 唐振,宋天武,金明.基于RS-485總線的分布式水位監(jiān)測系統(tǒng)設(shè)計(jì)[J].湖北科技學(xué)院學(xué)報(bào),2013(8):211-212.
[2] 曹衛(wèi),董航飛,李宗寶.GPRS技術(shù)在水利監(jiān)測系統(tǒng)中的應(yīng)用[J].排灌機(jī)械,2007(5):39-42.
[3] 馬洪連,李龍,蘆良鑫.水情自動(dòng)監(jiān)測終端的設(shè)計(jì)與實(shí)現(xiàn)[J].儀器儀表學(xué)報(bào),2007(1):274-276.
[4] 沈旭.基于GSM短消息的水情實(shí)時(shí)監(jiān)測系統(tǒng)設(shè)計(jì)[J].微計(jì)算機(jī)信息,2008(18):141-142.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32