一種基于改進(jìn)的DBSCAN的面向海量船舶位置數(shù)據(jù)碼頭挖掘算法*
2015-03-19 00:36:50丁兆穎畢經(jīng)平趙瑞蓮
計(jì)算機(jī)工程與科學(xué) 2015年11期
丁兆穎,姚 迪,吳 琳,畢經(jīng)平,趙瑞蓮
(1.北京化工大學(xué)信息學(xué)院,北京100029;2.中國(guó)科學(xué)院計(jì)算技術(shù)研究所,北京100190)
1 引言
船舶目標(biāo)跟蹤方法有很多種,比如國(guó)際海事衛(wèi)星C系統(tǒng)、北斗衛(wèi)星、Argos衛(wèi)星、AIS(Automatic Identification System)等。不同方法各有優(yōu)劣,比如國(guó)際海事衛(wèi)星C 系統(tǒng)是全天候、全球范圍、穩(wěn)定可靠的,但是終端價(jià)格和通信費(fèi)稍高;北斗衛(wèi)星技術(shù)速度快,但目前只是區(qū)域性,且終端尚不夠穩(wěn)定;AIS方法成本低廉,無(wú)需通信費(fèi),可以分布式建設(shè)。隨著《SOLAS公約》第五章新規(guī)則對(duì)船舶自動(dòng)識(shí)別系統(tǒng)(AIS)[1]強(qiáng)制性裝備的要求,所有300總噸及以上從事國(guó)際航行船舶、不從事國(guó)際航行的500總噸及以上的貨船和不論大小的客船,應(yīng)按要求配備自動(dòng)識(shí)別系統(tǒng)AIS。AIS在全球范圍內(nèi)廣泛使用。各類岸基AIS設(shè)備以及衛(wèi)星AIS設(shè)備每天接收到的船只動(dòng)態(tài)、靜態(tài)AIS實(shí)時(shí)報(bào)文數(shù)量數(shù)以億計(jì),為船舶軌跡研究提供了豐富的數(shù)據(jù)源。這些豐富的海量船舶數(shù)據(jù)中,隱藏著大量對(duì)水運(yùn)事業(yè)管理、規(guī)劃、安全等具有非常重大的意義的內(nèi)容。
在水運(yùn)行業(yè)中,港口作為運(yùn)輸樞紐,是各類交通工具轉(zhuǎn)換中心。碼頭、錨地的作用是供船舶進(jìn)出、停泊,是港口水域的重要組成部分。各類碼頭對(duì)城市經(jīng)濟(jì)的發(fā)展、區(qū)域經(jīng)濟(jì)的發(fā)展都起著非常重要的作用。近年來(lái)新建碼頭層出不窮,而中國(guó)海圖的更新間隔按照區(qū)域的熱度更新間隔長(zhǎng)達(dá)3個(gè)月、6個(gè)月、12個(gè)月不等的時(shí)間,存在嚴(yán)重的滯后性,并且海圖中缺乏碼頭的空間信息。本文提出的碼頭挖掘的研究工作可以有效、及時(shí)地更新碼頭空間數(shù)據(jù)。碼頭的空間信息可以進(jìn)一步應(yīng)用到船舶進(jìn)出港通知,不僅如此,碼頭的挖掘成果,也可以作為船舶數(shù)據(jù)其他研究領(lǐng)域的數(shù)據(jù)支撐,比如碼頭間航道挖掘、船舶行為異常監(jiān)測(cè)等。
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)算法是一種具有噪聲的基于密度的聚類分析算法,它可以將數(shù)據(jù)集分成若干組,并有效地處理噪聲點(diǎn),過(guò)濾低密度區(qū)域。其基本思想是在含有噪聲的數(shù)據(jù)空間中,通過(guò)不斷擴(kuò)展有足夠高密度的區(qū)域來(lái)進(jìn)行聚類,發(fā)現(xiàn)任意形狀的高密度多簇點(diǎn)集。但是,由于應(yīng)用DBSCAN算法時(shí)有eps和MinPts兩個(gè)參數(shù)需要人工提前確定,且算法對(duì)這兩個(gè)參數(shù)非常敏感,這一缺點(diǎn)普遍存在于實(shí)際的計(jì)算當(dāng)中。
本文提出一種針對(duì)海量數(shù)據(jù)優(yōu)化參數(shù)的DBSCAN 算法,可以根據(jù)不同的實(shí)際應(yīng)用場(chǎng)景、數(shù)據(jù)集特征,選取合適的算法參數(shù)。將其應(yīng)用在碼頭挖掘場(chǎng)景中,根據(jù)實(shí)際的停泊點(diǎn)數(shù)據(jù)規(guī)模和分布特征,自動(dòng)優(yōu)化停泊點(diǎn)聚類參數(shù),聚類出停泊點(diǎn)密集的停泊區(qū),去除停泊點(diǎn)稀疏區(qū)域的停泊點(diǎn)。再通過(guò)融合岸基結(jié)構(gòu)物等空間數(shù)據(jù),對(duì)停泊區(qū)域中的錨區(qū)和臨時(shí)停泊區(qū)域等進(jìn)行排除,獲取碼頭的空間信息,解決了碼頭空間數(shù)據(jù)實(shí)時(shí)更新問題。
本文第2節(jié)介紹了位置數(shù)據(jù)和DBSCAN 算法的相關(guān)研究工作;第3 節(jié)介紹自動(dòng)優(yōu)化DBSCAN算法參數(shù)的方法,及將改進(jìn)的DBSCAN 算法應(yīng)用于碼頭挖掘思路;第4節(jié)實(shí)驗(yàn)及結(jié)果分析;第5節(jié)總結(jié)全文并展望下一步研究工作。
2 相關(guān)工作
聚類在數(shù)據(jù)挖掘領(lǐng)域的研究比較多。聚類算法主要分為四種策略:(1)劃分聚類方法,如kmeans[2],需指定聚類個(gè)數(shù),不適用于發(fā)掘未知信息;(2)分層聚類方法,如BIRCH[3],計(jì)算量大,算法復(fù)雜度高,耗時(shí)較長(zhǎng),不適合應(yīng)用于海量數(shù)據(jù);(3)基于密度的聚類方法,如DBSCAN[4]和OPTICS[5],復(fù)雜度低,基于數(shù)據(jù)密度分布特征,對(duì)數(shù)據(jù)集聚類,比較適合本文所提的碼頭挖掘研究;(4)基于柵格的聚類方法,如STING[6],處理時(shí)間與每維空間所劃分的單元數(shù)相關(guān),一定程度上降低了聚類的質(zhì)量和準(zhǔn)確性。
目前,DBSCAN 聚類算法應(yīng)用在實(shí)際場(chǎng)景中的研究國(guó)內(nèi)外已有很多,比如交通事故多發(fā)區(qū)域的挖掘等。通過(guò)不斷地搜索臨近點(diǎn)來(lái)使核心對(duì)象周圍的密度逐漸增加,尋找到一個(gè)區(qū)域內(nèi)所查找點(diǎn)或?qū)ο竺芏却蟮牡胤健K惴ㄖ兴芯康狞c(diǎn)可以描述為交通事故多發(fā)的地點(diǎn)。由于應(yīng)用DBSCAN 算法時(shí)有eps和MinPts兩個(gè)參數(shù)需要人工提前確定,且算法對(duì)參數(shù)敏感,研究者在原始算法的基礎(chǔ)上提出了很多改進(jìn),來(lái)提高算法的效率。Han J等[7]通過(guò)計(jì)算數(shù)據(jù)集的信息熵,給出一個(gè)最優(yōu)參數(shù)的范圍。Karami A 等[8]提出了一種高效的混合聚類方法,命名為bde-dbscan,結(jié)合了二進(jìn)制差分進(jìn)化算法和DBSCAN 算法。這些方法都能很好地解決DBSCAN 算法的參數(shù)敏感問題,但是復(fù)雜度較高,且需要人工觀察,不適用在大數(shù)據(jù)量級(jí)的數(shù)據(jù)處理中。
目前國(guó)內(nèi)外很少有對(duì)船舶停泊點(diǎn)的分析研究,特別是基于停泊點(diǎn)的碼頭挖掘研究。Le Guillarme N 等[9]提出了一個(gè)船舶位置數(shù)據(jù)挖掘框架,從數(shù)據(jù)中提取航道和停泊點(diǎn),對(duì)停泊點(diǎn)進(jìn)行聚類,聚類出密集區(qū)域定義為港口、捕魚點(diǎn)等船只的目的地,沒有進(jìn)一步地劃分,也沒有解決聚類算法對(duì)參數(shù)敏感的問題。
3 碼頭挖掘算法
3.1 碼頭挖掘算法思路
船舶位置數(shù)據(jù),即船舶某個(gè)時(shí)間點(diǎn)所在位置的經(jīng)緯度。停泊點(diǎn)數(shù)據(jù)即是船舶在某個(gè)點(diǎn)附近停留時(shí)間超過(guò)一定閾值的點(diǎn)。面向海量船舶位置數(shù)據(jù)的碼頭挖掘算法主要分為兩步。第一步是從船舶位置原始數(shù)據(jù)中提取出停泊點(diǎn)數(shù)據(jù)。一般船舶停泊的地方主要集中在碼頭、錨區(qū)或臨時(shí)停泊區(qū),在這些區(qū)域船舶停泊點(diǎn)密度較大。除此之外還有很多分散停泊在這些區(qū)域外的船只,對(duì)于停泊區(qū)挖掘來(lái)說(shuō),這些數(shù)據(jù)屬于噪聲數(shù)據(jù)。第二步針對(duì)使用數(shù)據(jù)集,確定適應(yīng)停泊點(diǎn)數(shù)據(jù)聚類的參數(shù)。DBSCAN 算法是基于密度聚類的聚類算法,可以有效去掉停泊點(diǎn)噪聲數(shù)據(jù),將船舶位置數(shù)據(jù)分成多組任意形狀的停泊區(qū)。然而,針對(duì)不同的數(shù)據(jù),聚類算法的參數(shù)也不盡相同。本文提出一種優(yōu)化DBSCAN 算法參數(shù)的方法,自動(dòng)對(duì)比聚類后類中心密度變化,自動(dòng)選取合適的參數(shù),以提高停泊區(qū)挖掘的準(zhǔn)確度。確定聚類參數(shù)后,對(duì)停泊點(diǎn)數(shù)據(jù)進(jìn)行聚類。單純的聚類結(jié)果還不能確定碼頭,需要通過(guò)融合外部數(shù)據(jù),如岸基結(jié)構(gòu)物等,確定碼頭的位置和區(qū)域。碼頭挖掘流程如圖1所示。
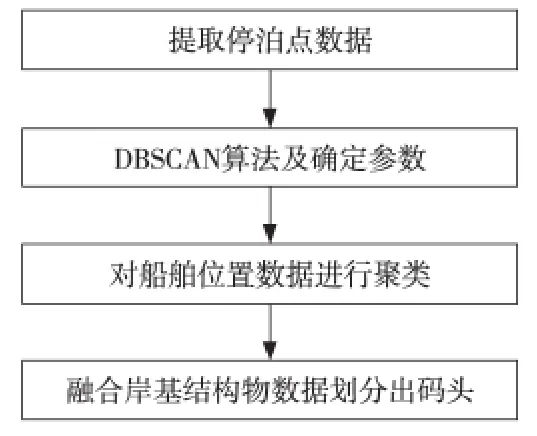
Figure 1 Flow chart of dock mining圖1 碼頭挖掘流程圖
本節(jié)的第2部分介紹海事船舶數(shù)據(jù)的預(yù)處理工作,從船舶自動(dòng)識(shí)別系統(tǒng)采集的原始海事船舶數(shù)據(jù),提取出本文需要的船舶停泊點(diǎn)數(shù)據(jù)。第3部分介紹DBSCAN 算法思想及優(yōu)化參數(shù)的方法。第4部分介紹聚類方法結(jié)果和融合外部數(shù)據(jù)的方法。
3.2 停泊點(diǎn)提取
基于帶有時(shí)間戳的船舶位置數(shù)據(jù)分析船舶海洋行為,需要對(duì)數(shù)據(jù)進(jìn)行劃分。其中基于分層數(shù)據(jù)融合的數(shù)據(jù)劃分方法是最適用于處理海量數(shù)據(jù)的方法,且該算法的計(jì)算復(fù)雜度是O(n)。劃分方法將數(shù)據(jù)劃分為兩層,AIS原始數(shù)據(jù)經(jīng)過(guò)L1層處理得到子航段。子航段數(shù)據(jù)經(jīng)過(guò)L2 層融合得到航段及停泊點(diǎn)[8]。原始數(shù)據(jù)處理流程如圖2所示。
L1層處理:分析單艘船時(shí)間序列上的數(shù)據(jù)。時(shí)間連續(xù)的AIS數(shù)據(jù)首尾相連,構(gòu)成一個(gè)向量,根據(jù)如下兩個(gè)條件判斷是否劃分子航段:
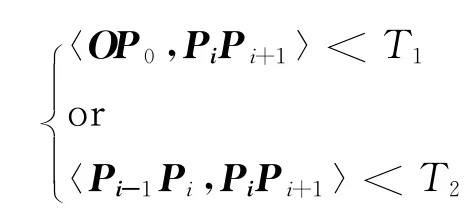
其中,O為起始點(diǎn),Pi表示AIS原始數(shù)據(jù)中第i個(gè)點(diǎn),T1、T2為兩個(gè)閾值,分別表示起始向量與第i個(gè)向量夾角閾值,第i個(gè)向量與第i-1 個(gè)向量夾角閾值。超過(guò)閾值時(shí)開始下一個(gè)子航段劃分。
L2層處理:基于規(guī)則挖掘出單艘船的子航段。根據(jù)船舶行為特點(diǎn)確定停泊點(diǎn),停泊點(diǎn)的定義是船舶子航段端點(diǎn)處停留時(shí)間超過(guò)一定閾值的點(diǎn)。
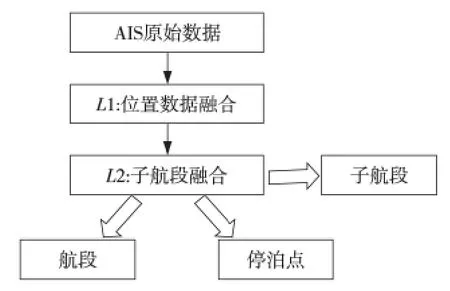
Figure 2 Flow chart of raw data processing圖2 原始數(shù)據(jù)處理流程圖
3.3 停泊點(diǎn)聚類算法
3.3.1 DBSCAN 算法
定義1eps鄰域:給定半徑eps(ε),以特定點(diǎn)為圓心,以eps為半徑的圓內(nèi)的點(diǎn)集稱為該停泊點(diǎn)的鄰域。
定義2 核心點(diǎn):鄰域內(nèi)的停泊點(diǎn)數(shù)大于或等于MinPts,則該點(diǎn)成為核心停泊點(diǎn)。
定義3 直接密度可達(dá):給定停泊點(diǎn)集合D,如果點(diǎn)p在q的鄰域內(nèi),且q是核心停泊點(diǎn),則稱點(diǎn)p到q直接密度可達(dá)。
定義4 密度可達(dá):給定停泊點(diǎn)集合D,如果存在停泊點(diǎn)子集p1,p2,p3,…,pn,pi(1≤i≤n)∈D,pi+1是從pi關(guān)于ε和MinPts直接密度可達(dá),則停泊點(diǎn)p是從q關(guān)于ε和MinPts密度可達(dá)。
定義5 密度相連:如果存在停泊點(diǎn)k∈D,使點(diǎn)p和q是關(guān)于ε和MinPts密度可達(dá),那么p到q是關(guān)于ε和MinPts密度相連。
算法1 基于DBSCAN 算法的碼頭挖掘算法
輸入:一組停泊點(diǎn)(經(jīng)緯度)集合D={p1,p2,p3,…,pn}(n是停泊點(diǎn)集合的數(shù)量)、鄰域半徑ε和最小鄰域點(diǎn)數(shù)MinPts;
輸出:labels整數(shù)集合,標(biāo)記每個(gè)點(diǎn)的類名。
functionDBSCAN(D,ε,MinPts)
clusterId=0;
標(biāo)記所有點(diǎn)為未分類點(diǎn);
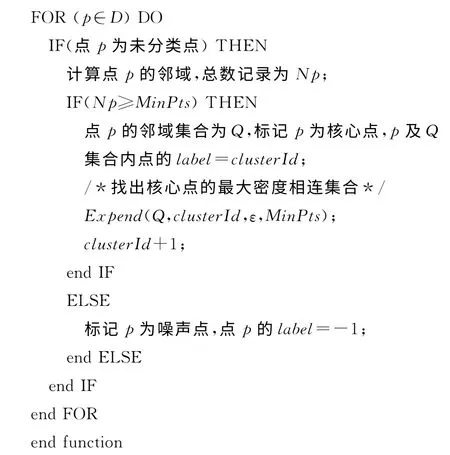
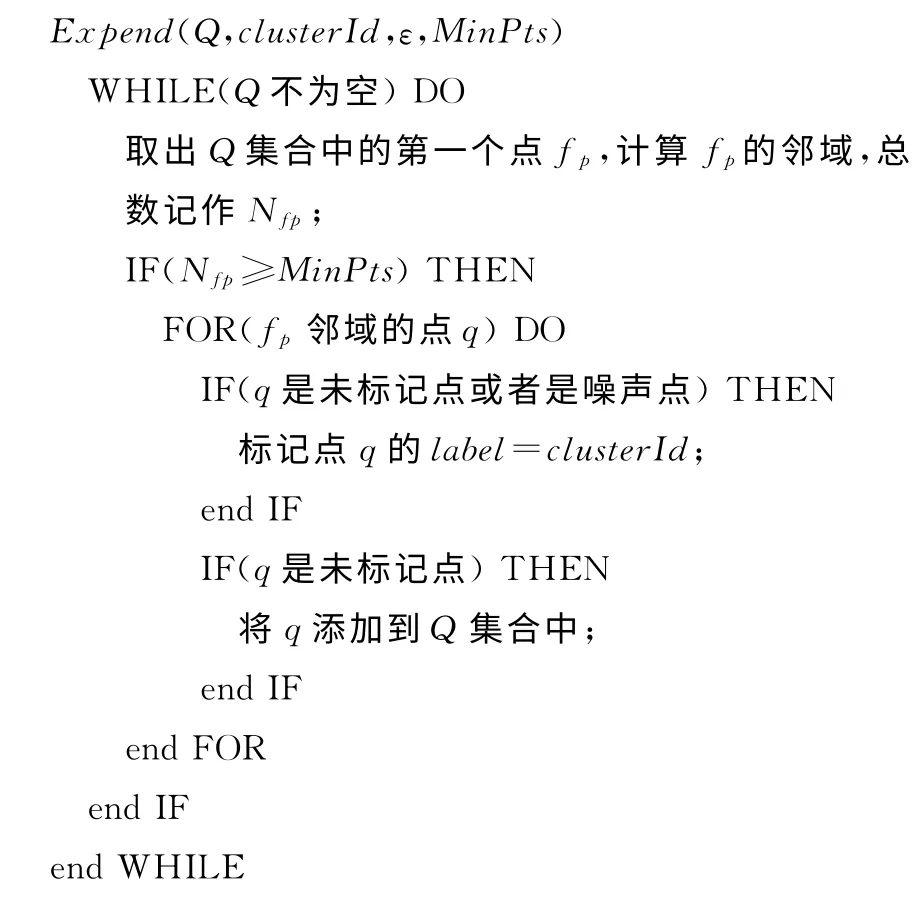
其中找出核心點(diǎn)的最大密度相連集合函數(shù)如下:
3.3.2 DBSCAN 參數(shù)優(yōu)化
DBSCAN 算法依賴聚類最小點(diǎn)數(shù)MinPts,聚類內(nèi)部最長(zhǎng)距離eps兩個(gè)參數(shù)。因此,對(duì)不同分布的數(shù)據(jù)需要調(diào)整不同的MinPts和eps,以達(dá)到好的聚類效果。本文采用聚類個(gè)數(shù)和類中心密度(Cluster Center Density)作為聚類效果的評(píng)價(jià)指標(biāo),分別確定MinPts及eps,不斷迭代直到MinPts和eps穩(wěn)定。
由于DBSCAN 是基于密度的聚類算法,因此該算法在一定程度上對(duì)參數(shù)不敏感。即由一個(gè)確定的MinPts可能有多個(gè)連續(xù)的eps與之對(duì)應(yīng),即一個(gè)eps的區(qū)間對(duì)應(yīng),因此尋找最優(yōu)參數(shù)即尋找最優(yōu)的MinPts區(qū)間與eps區(qū)間。區(qū)別于傳統(tǒng)的優(yōu)化問題,本問題找不到一個(gè)可以形式化表示的損失函數(shù)。參數(shù)優(yōu)化算法如下:
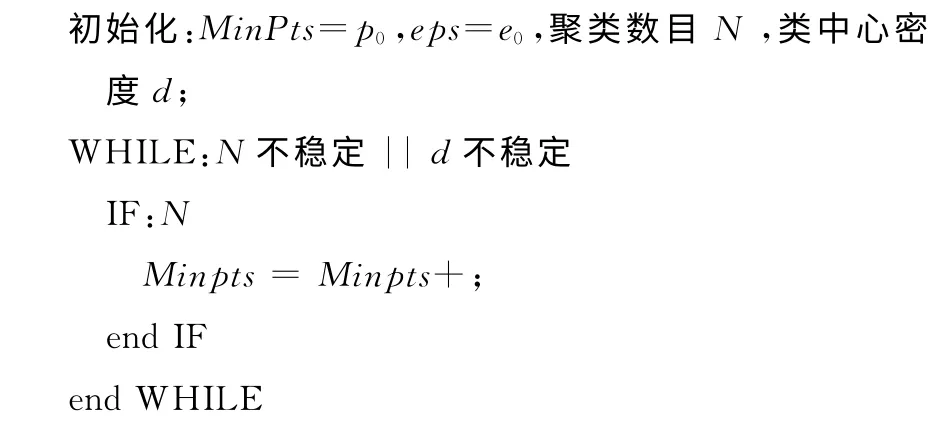
算法2 DBSCAN 參數(shù)確定算法
輸 入:數(shù) 據(jù) 集,MinPts初 始 值p0,eps初 始 值e0,MinPts變化率;
輸出:最優(yōu)參數(shù)區(qū)間p,e。
當(dāng)eps值確定時(shí),搜索不同MinPts值,計(jì)算不同MinPts產(chǎn)生的聚類個(gè)數(shù)。首先確定MinPts搜索間隔,記錄MinPts對(duì)應(yīng)的聚類個(gè)數(shù)。聚類個(gè)數(shù)的變化一定是遞減的過(guò)程,選取聚類個(gè)數(shù)達(dá)到最大穩(wěn)定時(shí)對(duì)應(yīng)的MinPts值作為最佳MinPts值。實(shí)現(xiàn)方法為計(jì)算不同MinPts值對(duì)應(yīng)的聚類個(gè)數(shù)計(jì)算橫坐標(biāo)為MinPts值,縱坐標(biāo)為聚類個(gè)數(shù)確定的點(diǎn)中,每一個(gè)點(diǎn)與下一個(gè)點(diǎn)相連直線的斜率。
設(shè)第n次搜索得到的點(diǎn)為Pn(MinPtsn,Cn),其中MinPtsn為聚類最小點(diǎn)數(shù),Cn為聚類個(gè)數(shù)。對(duì)每一步記錄kPn-1Pn。搜索的終止條件為:

其中,

Δeps為搜索步長(zhǎng),是一個(gè)常數(shù);m為穩(wěn)定條件,即有m步斜率接近于零則判定為穩(wěn)定,并記錄MinPts的值。
3.4 融合岸基結(jié)構(gòu)物篩選碼頭
根據(jù)上述算法,可以將停泊點(diǎn)數(shù)據(jù)聚成一個(gè)個(gè)停泊區(qū)域,對(duì)不同的停泊區(qū)域肯定需要參照其地理位置信息對(duì)其分類。本文通過(guò)融合岸基結(jié)構(gòu)物數(shù)據(jù),根據(jù)碼頭的形狀位置特征從停泊區(qū)域中篩選出碼頭,并將篩選出的碼頭與已有碼頭分布的區(qū)域比對(duì),驗(yàn)證算法挖掘出碼頭的準(zhǔn)確性。
海岸線延伸出大陸架的部分稱為陸地的岸基結(jié)構(gòu)物,碼頭一定是貼近岸基結(jié)構(gòu)物建造的。本文用到的岸基結(jié)構(gòu)物由google KML文件標(biāo)準(zhǔn)定義,定義結(jié)構(gòu)如圖3所示。
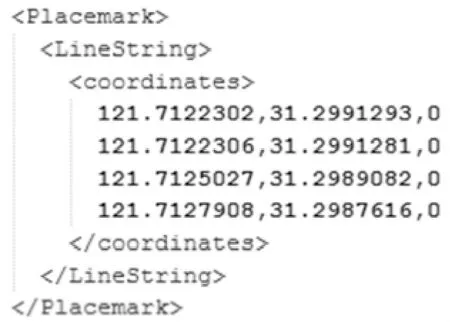
Figure 3 Raw data of the shore structures圖3 岸基結(jié)構(gòu)物原始數(shù)據(jù)
可以看出,岸基結(jié)構(gòu)物是通過(guò)一條條線定義的,通過(guò)計(jì)算聚類區(qū)域到線的距離即可判斷停泊區(qū)域是否是一個(gè)碼頭。
設(shè)類核心點(diǎn)為P,首先提取以P為中心、以r為半徑區(qū)域內(nèi)的岸基結(jié)構(gòu)物線段數(shù)據(jù),設(shè)定碼頭距岸基閾值rt,如果r<rt即判定該區(qū)域?yàn)榇a頭區(qū)域,否則不是碼頭區(qū)域。
4 實(shí)驗(yàn)及分析
4.1 實(shí)驗(yàn)場(chǎng)景
本文實(shí)驗(yàn)基于2012年4月至2014年4月的滾裝船位置數(shù)據(jù),實(shí)現(xiàn)了改進(jìn)的DBSCAN 算法和挖掘碼頭算法,挖掘出國(guó)內(nèi)滾裝船碼頭,通過(guò)對(duì)比人工識(shí)別碼頭判斷算法準(zhǔn)確率。同樣用本文提出的算法,挖掘出國(guó)際滾裝船碼頭。實(shí)驗(yàn)表明本文方法具有很高的準(zhǔn)確性和很強(qiáng)的可擴(kuò)展性。本實(shí)驗(yàn)使用的語(yǔ)言是Python 2.7版本,在普通的電腦上執(zhí)行程序,具體實(shí)驗(yàn)環(huán)境參數(shù)和實(shí)驗(yàn)數(shù)據(jù)如表1和表2所示。
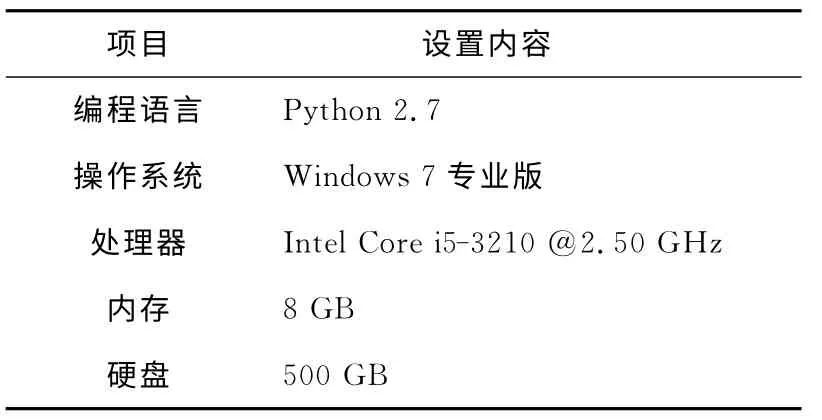
Table 1 Experimental environment表1 實(shí)驗(yàn)環(huán)境
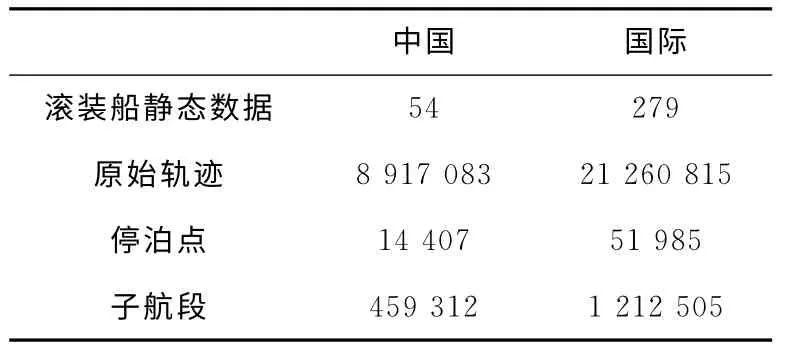
Table 2 Experimental dataset表2 實(shí)驗(yàn)數(shù)據(jù)
表2是從AIS采集到大量船舶靜態(tài)和動(dòng)態(tài)數(shù)據(jù),包括船位、航向、航速、類型等中提取出的滾裝船位置數(shù)據(jù)。其中靜態(tài)數(shù)據(jù)表示船舶的條數(shù),國(guó)內(nèi)54艘滾裝船,國(guó)際有279艘。
4.2 DBSCAN 算法參數(shù)選取
碼頭挖掘算法第二步,首先要針對(duì)使用數(shù)據(jù)集,確定適應(yīng)停泊點(diǎn)數(shù)據(jù)聚類的參數(shù)。按照本文參數(shù)優(yōu)化方法,首先確定MinPts值。給出DBSCAN算法兩個(gè)參數(shù)最小點(diǎn)數(shù)MinPts和聚類內(nèi)部最長(zhǎng)距離eps的初始值10和0.000 3,ΔMinPts為1,m取值為5,即有5步斜率接近于零則判定為穩(wěn)定,并記錄MinPts的值。分別計(jì)算特定eps值時(shí),計(jì)算不同MinPts產(chǎn)生的聚類個(gè)數(shù)。如圖4所示,橫坐標(biāo)是MinPts值,縱坐標(biāo)代表聚類的個(gè)數(shù)。
本文算法的執(zhí)行結(jié)果中,當(dāng)eps=0.000 3時(shí),MinPts值取32,當(dāng)eps=0.000 6時(shí),MinPts值取31,當(dāng)eps=0.000 8時(shí),MinPts值取34,當(dāng)eps=0.001 0 時(shí),MinPts值 取32。確 定MinPts值 為32。
確定MinPts值后,需要根據(jù)得到的MinPts值確定eps。在聚類核心點(diǎn)中隨機(jī)選取25個(gè)點(diǎn)。計(jì)算并記錄不同eps值時(shí),每個(gè)點(diǎn)所在類中的類中心密度即最大密度相連集合內(nèi)點(diǎn)總數(shù)。如圖5所示。
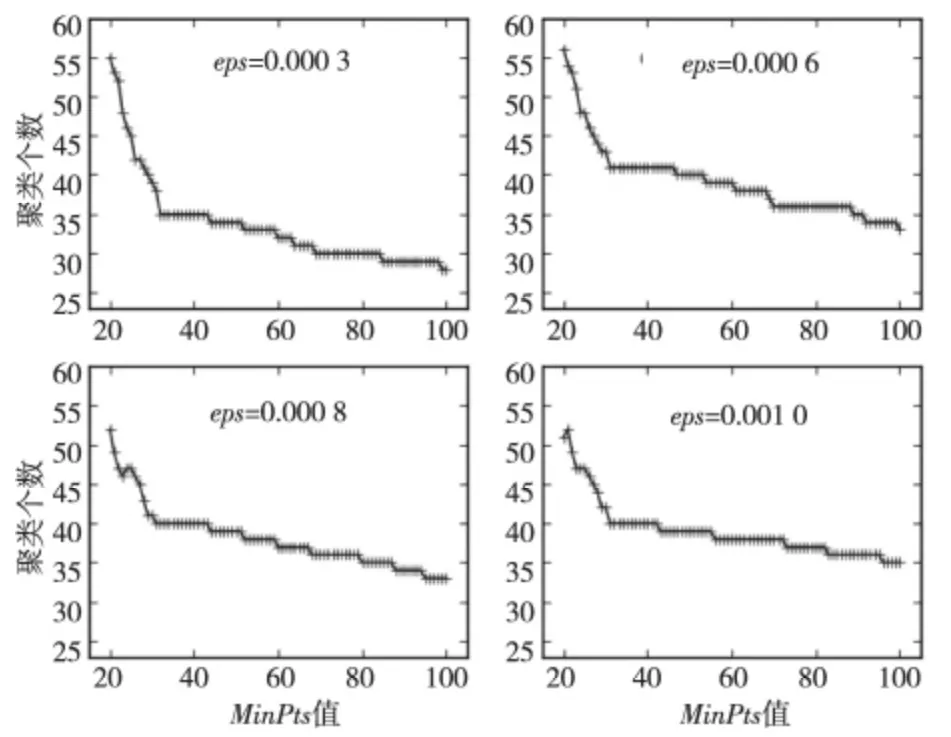
Figure 4 The number of clusters based on different eps changing with MinPts value圖4 不同eps聚類個(gè)數(shù)隨MinPts值變化曲線圖
當(dāng)eps取0.000 68時(shí),所有點(diǎn)類中心密度達(dá)到穩(wěn)定,即確定eps值為0.000 68,從而最終確定eps值為0.000 68,MinPts值為32。如圖5所示。
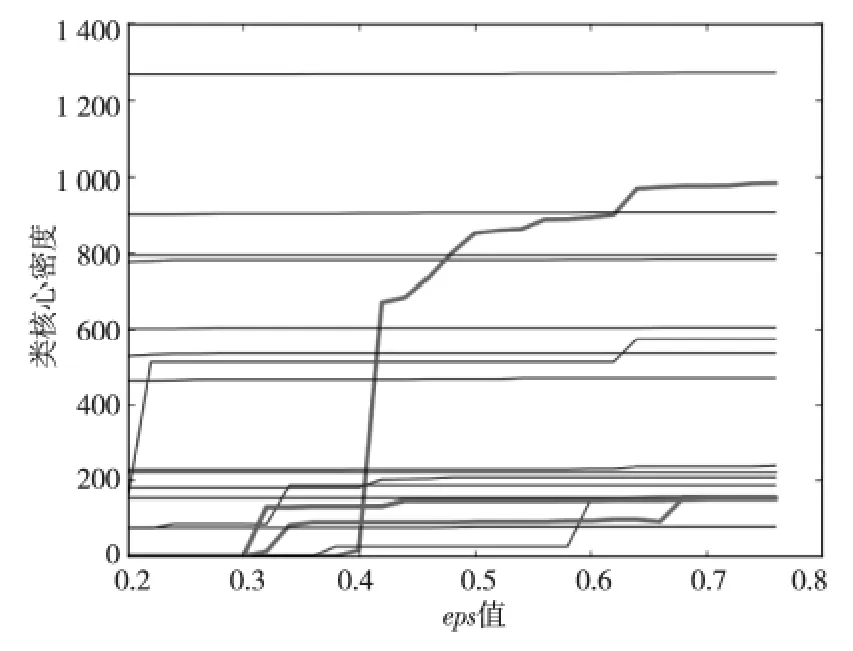
Figure 5 The class center density of core points varying with the eps value圖5 核心點(diǎn)的類中心密度隨eps值變化曲線圖
4.3 國(guó)內(nèi)滾裝船碼頭挖掘?qū)嶒?yàn)
根據(jù)上一步實(shí)驗(yàn),挖掘國(guó)內(nèi)滾裝船碼頭算法的兩個(gè)參數(shù)eps和MinPts的值分別確定為0.000 68和32,挖掘國(guó)內(nèi)滾裝船碼頭。 本文利用googleMap展現(xiàn)國(guó)內(nèi)滾裝船碼頭的挖掘結(jié)果。挖掘出的碼頭位置用圓點(diǎn)表示,共挖掘出國(guó)內(nèi)滾裝船停泊區(qū)40個(gè),篩選出碼頭29個(gè)。圖6為使用本文提出的算法挖掘出的碼頭與真實(shí)碼頭的對(duì)比圖,三角標(biāo)志是人工標(biāo)記的真實(shí)碼頭。
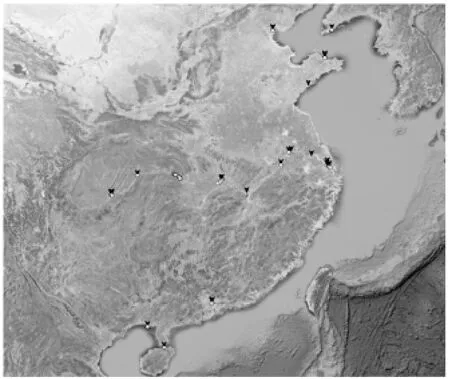
Figure 6 Result of dock mining for Chinese Ro Ro vessels圖6 國(guó)內(nèi)滾裝船碼頭挖掘結(jié)果
圖7是放大的上海外高橋碼頭區(qū)域,深色部分是岸基結(jié)構(gòu)物,可以看到融合岸基結(jié)構(gòu)物后可以清晰地區(qū)分出碼頭與非碼頭。從圖7可以看出,碼頭都在岸基結(jié)構(gòu)物附近,非碼頭區(qū)域離岸基較遠(yuǎn)。圖中黑色圓點(diǎn)是已公布的滾裝船碼頭位置。人工識(shí)別標(biāo)記的滾裝船碼頭有27個(gè),本文算法挖掘出的碼頭有29個(gè),正確率達(dá)93%。以此可見本文提出的算法能有效、準(zhǔn)確地挖掘出碼頭的位置。此處挖掘出的非碼頭區(qū)域?yàn)樯虾4a頭附近的錨區(qū)。其作用是供船舶停靠等待裝卸貨物。此類停泊區(qū)域在本文中不做深入闡述。
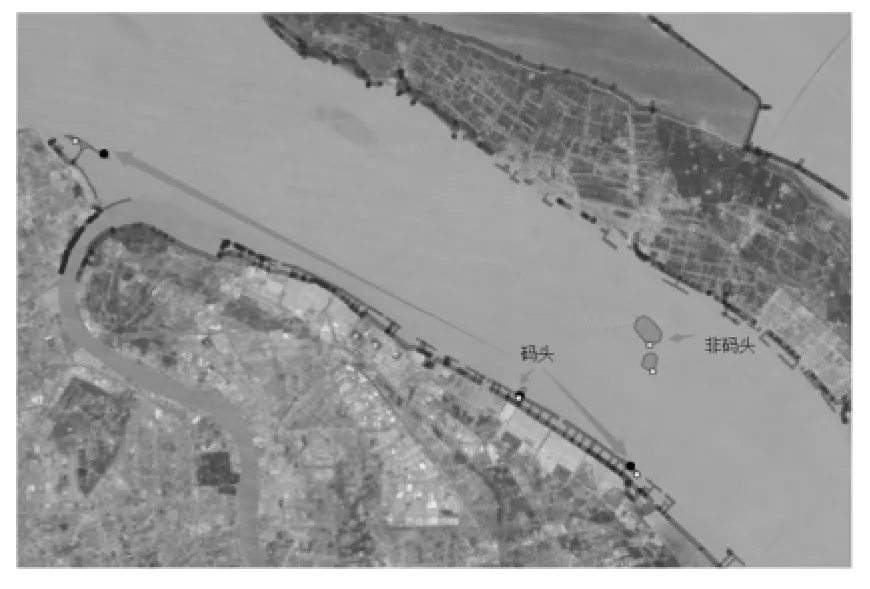
Figure 7 Shanghai Waigaoqiao dock area combined with shore structures圖7 上海外高橋碼頭區(qū)域結(jié)合岸基結(jié)構(gòu)物
4.4 國(guó)際滾裝船碼頭挖掘?qū)嶒?yàn)
本文利用國(guó)際滾裝船位置數(shù)據(jù)進(jìn)行測(cè)試,與國(guó)內(nèi)滾裝船數(shù)據(jù)同時(shí)間段的國(guó)際船舶位置數(shù)據(jù)有51 985條。利用本文挖掘碼頭算法,共挖掘出244個(gè)停泊區(qū)。如圖8所示。
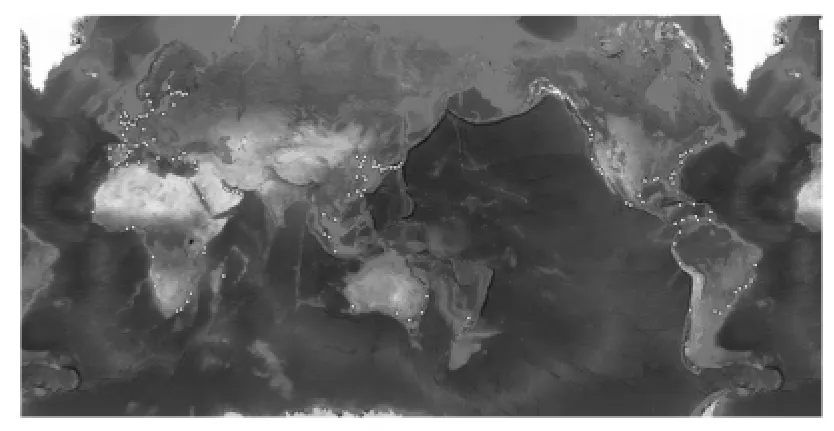
Figure 8 Dock mining result for international Ro Ro vessels圖8 國(guó)際滾裝船碼頭挖掘結(jié)果
對(duì)比地形結(jié)構(gòu)發(fā)現(xiàn),通過(guò)本文方法挖掘出的滾裝船碼頭大部分與地形相符,表明本文提出的算法對(duì)不同的數(shù)據(jù)集有較好的可擴(kuò)展性。
5 結(jié)束語(yǔ)
本文提出的優(yōu)化參數(shù)的DBSCAN 算法,根據(jù)待聚類數(shù)據(jù)特征,自動(dòng)優(yōu)化確定DBSCAN 算法的兩個(gè)參數(shù),有效地解決了DBSCAN 算法對(duì)參數(shù)敏感問題。本文又提出一種基于船舶位置數(shù)據(jù)挖掘碼頭的算法,第一步先挖掘出停泊區(qū)域,再一步,融合岸基結(jié)構(gòu)物數(shù)據(jù),篩選出碼頭區(qū)域。本文選取2012年4月至2014年4 月國(guó)內(nèi)滾裝船位置數(shù)據(jù)進(jìn)行實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果表明,本文算法能夠針對(duì)特定數(shù)據(jù)集的分布特征及規(guī)模,自動(dòng)確定DBSCAN 算法參數(shù),并聚類出停泊區(qū)。再融合岸基結(jié)構(gòu)物數(shù)據(jù)篩選出碼頭區(qū)域,對(duì)比本文挖掘出的碼頭位置和人工標(biāo)注的碼頭位置數(shù)據(jù),本文算法正確率達(dá)到93%。下一步工作,在完善碼頭挖掘工作的同時(shí),分析非碼頭停泊區(qū)域的特點(diǎn),融合多樣化的數(shù)據(jù),挖掘出更多有用的知識(shí)。
[1] Wang Yong.AIS technology application in the navigation practice analysis[J].Science Technology and Enterprise,2013(22):158.(in Chinese)
[2] Loyd S.Least squares quantization in PCM[J].IEEE Transactions on Information Theory,1982,28(2):129-137.
[3] Zhang T,Ramakrishnan R,Livny M.BIRCH:An efficient data clustering method for very large databases[J].ACM SIGMOD Record,1996,25(2):103-114.
[4] Dai B R,Lin I.Efficient map/reduce-based DBSCAN algorithm with optimized data partition[C]∥Proc of 2012IEEE 5th International Conference on Cloud Computing(CLOUD),2012:59-66.
[5] Shi X,Chen Y,Tan Z,et al.Numerical simulation of adaptive optics correction system[C]∥Proc of 2011IEEE 3rd International Conference on Communication Software and Networks(ICCSN),2011:293-296.
[6] Wang W,Yang J,Muntz R R.STING:A statistical information grid approach to spatial data mining[C]∥Proc of the 23rd International Conference on Very Large Data Bases,1997:186-195.
[7] Lee J G,Han J,Whang K Y.Trajectory Clustering:A partition-and-group framework[C]∥Proc of SIGMOD,2007:593-604.
[8] Karami A,Johansson R.Choosing DBSCAN parameters automatically using differential evolution[J].International Journal of Computer Applications,2014,91(7):1-11.
[9] Le Guillarme N,Lerouvreur X.Unsupervised extraction of knowledge from S-AIS data for maritime situational awareness[C]∥International Conference on Information Fusion,2013:2025-2032.
附中文參考文獻(xiàn):
[1] 王勇.AIS技術(shù)在航海實(shí)踐中的應(yīng)用分析[J].科技與企業(yè),2013(22):158.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52