基于ADAMS+MATLAB的移動焊接機器人運動仿真
2015-03-24 08:02:22葉艷輝
制造業自動化 2015年5期
王 帥,張 華,葉艷輝
WANG Shuai, ZHANG Hua, YE Yan-hui
(南昌大學 江西省機器人與焊接自動化重點實驗室,南昌 330031)
0 引言
隨著工業的不斷發展,焊接技術作為基礎技術之一,對于航天航空、船舶制造、特種工業制造等起著決定性的作用。人工焊接作為傳統焊接手段,受到環境惡劣、生產率低下等的制約。隨著自動化水平不斷發展,自動化焊接設備被引入到工業制造中。其中,移動焊接機器人作為典型的焊接機器人,擁有可靠穩定、保證焊接質量等優點,被廣泛應用到船舶焊接中。
由于移動焊接機器人是一個復雜的被控對象,移動機構的機械誤差、焊接過程中的擾動、輪胎與地面之間的摩擦等因素都會使得機器人產生偏差,使其運動特性受到影響。本文針對狹小空間內平面焊縫自動化焊接的移動焊接機器人進行了建模,討論了其運動學模型以及跟蹤偏差,最后利用ADAMS與MATLAB聯合仿真技術對于虛擬樣機進行仿真,以指導物理樣機焊接實驗,減少實驗次數,降低研發成本。
1 移動焊接機器人結構建模
如圖1所示,為移動焊接機器人結構圖,采用輪式移動平臺,具有兩個獨立自由度,配合萬向球構成三點支撐,兩輪以差速形式使得移動平臺轉動,當兩驅動輪以同速反向運動時,移動平臺可完成轉彎半徑為零的圓周運動。根據焊接精度要求,選取十字滑塊作為二維精確運動平臺作為主要跟蹤機構,其由兩相互垂直的滾珠絲杠機構組成,能在平面內任意往復運動,具有運動平穩、精度高和可靠性好等特點。
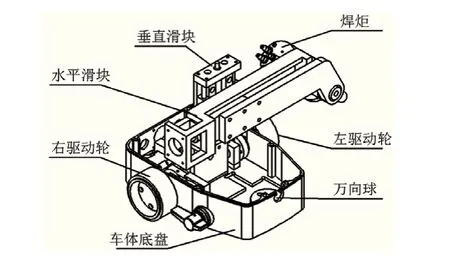
圖1 移動焊接機器人結構
焊接自動化系統中最重要的問題是焊縫跟蹤與實時控制。因此,焊接傳感器決定了移動焊接機器人的焊接跟蹤精度。本移動焊接機器人選用旋轉電弧傳感器作為實時傳感。電弧傳感不受弧光、磁場、飛濺等因素干擾,焊炬與傳感器制為一體,使得檢測點與焊接點統一,保證了檢測的實時性。其中旋轉電弧傳感具有旋轉頻率高、跟蹤精度好,且其旋轉半徑和速度可調等優點,更加適用于狹小焊接環境。
2 移動焊接機器人運動學模型及偏差分析
移動焊接機器人是一個空間內多自由度模型,所以其在空間內運動學計算非常復雜。為了實現移動焊接機器人的運動仿真,必須建立其數學模型,該模型也是研究其控制算法的基礎。
如圖2所示,為移動焊接機器人焊接跟蹤模型。簡化模型,假設移動焊接機器人為剛性結構,驅動輪與地面為剛性接觸,且做純滾動,將其建立在笛卡爾平面坐標下。

圖2 移動焊接機器人焊接跟蹤模型
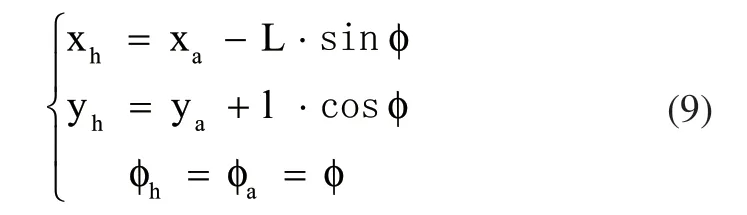
定義點A為移動焊接機器人移動中心點,焊接初始位置焊接點h具移動中心點距離為L,L為變量,由水平滑塊所走位移決定,即取決于水平驅動步進電機的脈沖個數。驅動輪直徑為D,驅動輪外側到機器人移動中心點距離為t。定義焊縫中一點C為焊接參考點,C點與h點之間行程焊接偏差向量車體縱軸線與X軸正方向夾角為φ,焊縫在C點切線方向與X軸正方向夾角為φc。
2.1 運動學方程
由機器人運動學方程可知,當機器人受到m個約束時,在n維廣義坐標P=[P1,…,Pn]T中可用下式表達:

由于移動焊接機器人的運動學模型為非完整約束,在此條件下式(1)中:

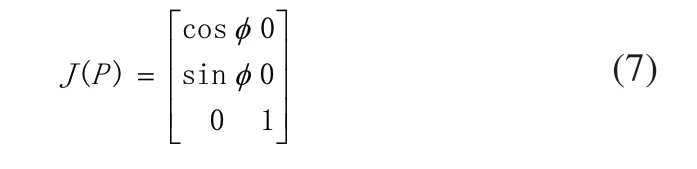
式(2)中J(P)為一個n×(n-m)矩陣,K為速度矢量,且滿足:

非完成約束移動焊接機器人位置的移動中心點在笛卡爾坐標中為A(xa,ya),其可定義為向量形式:

根據假設,驅動輪與地面為剛性接觸,且做純滾動,不發生滑動,式(1)中A(P)可用式(6)表達:

則根據式(3)可推出:
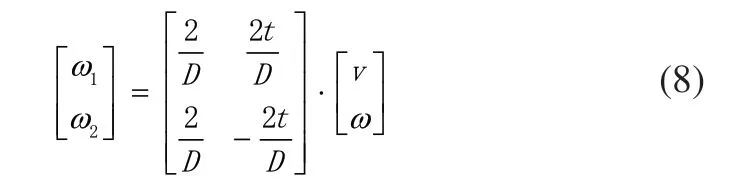
對于左右兩驅動輪的角速度ω1、ω2與速度矢量的關系式為:
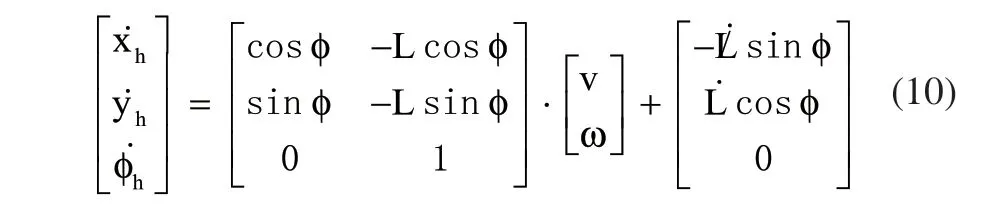
如圖2所示,在笛卡爾坐標系下,可由移動焊接機器人移動中心點A(xa,ya,φa)推導出機器人執行末端旋轉電弧傳感器實時焊接點h(xh,yh,φh)的運動學方程:
對上式求導即可得出速度方程:
2.2 焊接偏差計算
建立焊縫中一參考點C(xc,yc,φc),并在移動焊接機器人參考坐標系中得出其速度矩陣:
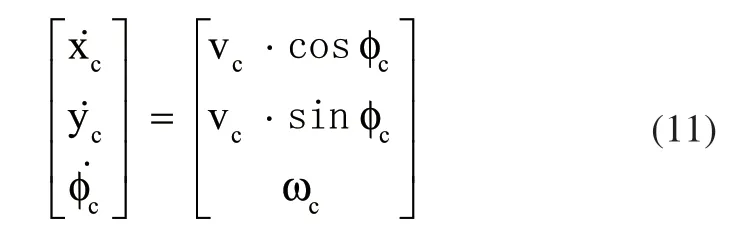
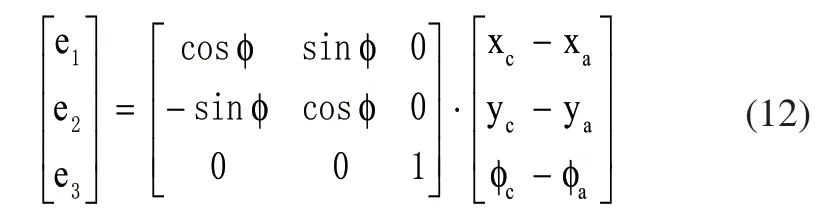
圖2中定義了偏差矢量e,則計算得出移動焊接機器人在跟蹤平面曲線時的偏差矢量e表示為:
3 建立虛擬樣機
ADAMS是美國MDI公司研制的集建模、求解、可視化技術為一體的虛擬樣機軟件,是世界上使用最廣泛的機械系統仿真分析軟件。可真實地仿真復雜機械系統的運動過程。設計移動焊接機器人在虛擬樣機中進行試驗,直到獲得優化的工作性能,大大減少了昂貴的物理樣機制造和實驗次數,提高了設計成功率。
由于ADAMS自身建模能力并不強大,因此借助CATIA建模功能,而Simdesigner是CATIA與ADAMS軟件之間的接口模塊,可實現二者的無縫連接,利用Simdesigner添加相應的運動約束,再導入ADAMS中,可保證模型的仿真精度。移動焊接機器人是一個復雜機械系統,對其仿真需要大量的計算工作,為了減少計算機計算量,需要對整體移動焊接機器人進行簡化,刪去螺紋、過渡圓弧等,將其中不發生相對運動的部件進行合并固定,圖3為簡化后的虛擬樣機模型。
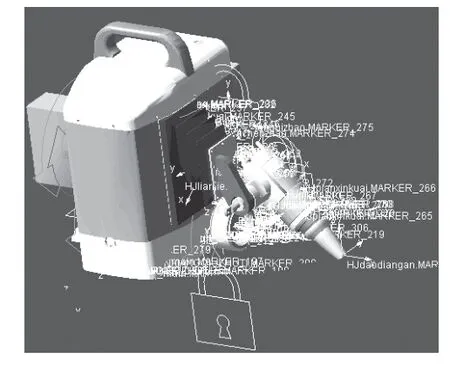
圖3 虛擬樣機模型

圖4 彎曲焊縫軌跡
為了驗證模型的正確性,對模型進行軌跡仿真。首先對垂直滑塊不施加驅動,對兩驅動輪和水平滑塊分別添加驅動參數。左右兩輪分別為180°/s。水平滑塊驅動函數為:STEP(time,0,0d,1,-3600d)+STEP(time,1,0d,2,3600d)+STEP(time,2,0d,3,-1800d)+STEP(time,3,0d,4,1800d)。進行仿真后,得出彎曲焊縫軌跡如圖4所示,可知此焊接移動機器人模型正確并可完成各種平面運動軌跡。
4 聯合仿真
移動焊接機器人本身是一個復雜的機械系統,而焊接過程中的焊縫跟蹤又需要復雜的控制系統作為支撐,ADAMS雖然功能強大,但要做到對復雜機械系統進行準確控制,ADAMS自身很難完成。所以本文采用ADAMS與MATLAB聯合仿真技術對移動焊接機器人的移動平臺進行控制仿真,以獲得平臺運動性能,為后期控制算法提供依據。
4.1 仿真原理
ADAMS和MATLAB之間的通訊是依靠狀態變量進行數據傳輸的,需建立一組狀態變量作為輸入和輸出,其輸入輸出關系如圖5所示。
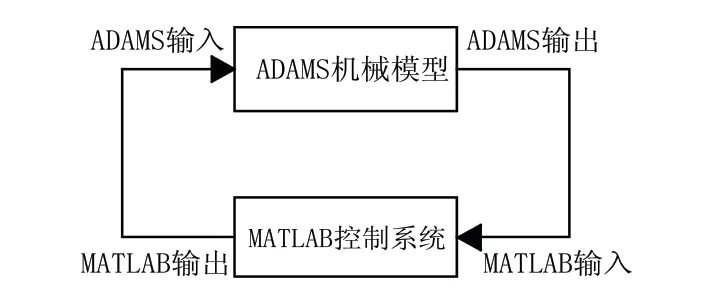
圖5 聯合仿真輸入輸出關系
4.2 仿真系統建立
對于移動焊接機器人移動平臺的控制,輸入必須為力矩,所以建立左右兩輪的驅動力矩作為輸入狀態變量,運用ADAMS中VARVAL函數,控制狀態變量實時返回控制力矩的值。設置兩輪轉速作為輸出狀態變量,轉速單位統一為度/秒。
當對移動平臺驅動輪施加同樣力矩時,由于移動焊接機器人為非對稱結構,使得機器人在行走方向上左輪支反力大于右輪,導致移動焊接機器人行走軌跡不為一條直線。在MATLAB中建立控制系統直接控制兩輪轉速,消除由于機構原因而帶來的行走偏差,可進一步提高焊接跟蹤精度
采用PID控制,在MATLAB中建立驅動輪穩速閉環系統,定義反饋量為左右兩輪的轉速,輸入量為一常值與反饋轉速的差值,輸出量為驅動扭矩。建立閉環系統后的控制模型如圖6所示。控制系統中adams_sub為移動焊接機器人機械系統模型。
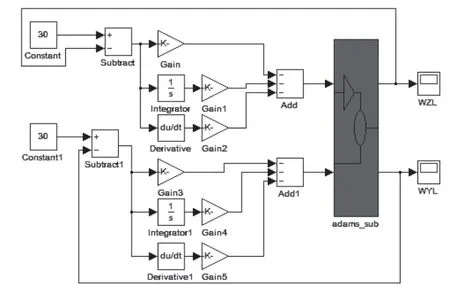
圖6 速度仿真控制模型
經過多次仿真實驗后,得到合理左右兩輪PID控制參數分別為:KP=3,KI=800,KD=100,設定兩輪轉速均為30°/s,移動焊接機器人兩驅動輪速度響應曲線如圖7(a)、7(b)所示,由曲線可知,采用PID控制可仿真出移動焊接機器人驅動輪的轉速控制特性。
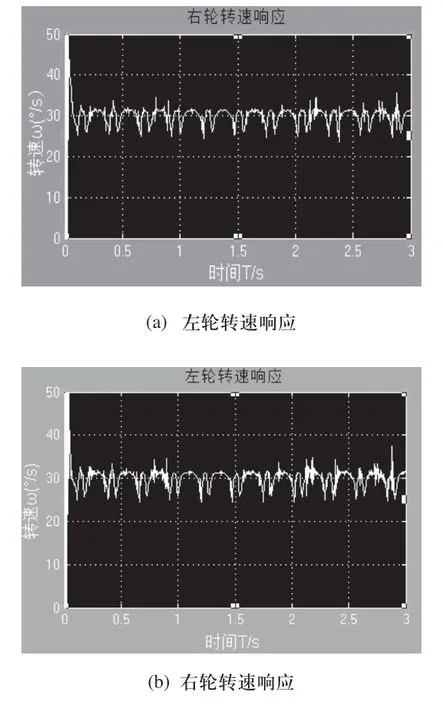
圖7 左右轉速響應
如圖8所示,為根據仿真進行的物理實驗,實驗參數為焊接電流200A,電壓25V,輪子移動速度40cm/min, 焊絲直徑1.2mm,保護氣體(Ar)80%+(CO2)20%, 保護氣流量15L/min,母材的厚度為6mm。

圖8 直線焊接實驗結果
5 結論
1)本文針對狹小空間內平面焊縫自動化焊接的工況,建立了移動焊接機器人平臺,在笛卡爾平面坐標下建立了移動焊接機器人數學模型,并針對彎曲焊縫焊接軌跡進行了運動學方程的建立和偏差計算,為其控制算法提供理論依據。
2)利用虛擬樣機技術在ADAMS中建立移動焊接機器人虛擬樣機,并進行了軌跡仿真,驗證了模型的正確性,證明了移動焊接機器人可完成平面內焊縫焊接工作。
3)對移動焊接機器人移動平臺進行了ADAMS+MATLAB聯合仿真,根據移動焊接機器人結構特點,建立出其驅動輪速度控制模型,并利用PID控制進行仿真得出了其控制響應曲線,利用算法消除了由于機構特點而帶來的行走偏差,為物理樣機實驗提供了理論依據。最后進行了實驗,實驗表明修正由于機構原因而帶來的行走偏差可進一步提高焊接跟蹤精度。
[1] 沈紅芳,鄭建榮.ADAMS在弧焊機器人運動學中的仿真分析和應用[J].機械設計,2004,21(12):50-52.
[2] 于殿勇,錢玉進.基于ADAMS動力學仿真參數設置的研究[J]. 計算機仿真,2006,23(9):103-107.
[3] 易聲耀,潘存云.一種新型移動平臺動力學仿真與試驗研究[J]. 機械設計與研究,2007,23(2):55-59.
[4] 卞向娟,龔友平,陳國金.焊接機器人的虛擬樣機設計與仿真[J]. 機械設計,2008,25(4):27-29.
[5] 毛志偉.旋轉電弧傳感移動焊接機器人機構設計與仿真[D].南昌:南昌大學,2007.
[6] 符婭波,邊美華,許先果.弧焊機器人的應用與發展[J].熱加工工藝,2006,35(11):79-81.
[7] 劉晉霞,胡仁喜,康士廷,等.ADAMS2012虛擬樣機從入門到精通[M].北京:機械工業出版社,2013.
[8] 游世明,陳思忠,梁賀明.基于ADAMS的并聯機器人運動學和動力學仿真[J].計算機仿真,2005,22(8):181-185.
[9] 張華,王海東,徐建寧,等.基于旋轉電弧傳感的新型輪式自主移動焊接機器人系統[J].機器人,2003,25(6):536-538,553.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2021年6期)2021-06-09 05:57:08
裝備制造技術(2021年1期)2021-05-21 07:55:04
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
制造技術與機床(2018年12期)2018-12-23 02:40:58
制造業自動化(2017年2期)2017-03-20 14:26:13
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
