基于星圖模擬的星空目標提取
2015-03-29 02:10:26徐韜祜孫華燕張廷華
激光與紅外 2015年1期
徐韜祜,孫華燕,張廷華,都 琳
(1.裝備學院研究生院,北京101416;2.裝備學院光電裝備系,北京101416)
1 引言
通過地基設備對空間目標進行觀測時,由于星空背景的影響,空間目標淹沒在大量的星體背景中,因此星空背景下的空間目標提取成為普遍關注的難點問題。
目前空間目標提取方法主要針對單幀或多幀圖像,其中,單幀圖像提取一般是基于目標信號特征進行濾波,由于信噪比極低,此類方法通常無法使用[1],多幀檢測多是基于目標運動軌跡連續特性的檢測,將連續兩幀圖像配準、差分、二值化與后一幀邊緣提取的圖像進行邏輯乘,得到目標[2],此方法對于前后兩幀時間間隔較長,有恒星進場或出場導致無法配準的情況不適用。文獻[3]還提出了一種將序列圖像疊加得到恒星背景圖像,并對星點圖像進行膨脹處理后生成掩模,利用生成的掩模對序列星圖進行去除恒星背景的處理,此方法只適用于序列圖像中恒星像素坐標相對運動較小的情況。
針對這些問題,本文提出了一種通過模擬星圖去除恒星背景提取目標的方法,利用模擬星圖生成掩模,對實拍星圖做去除恒星背景的處理。
2 基本原理
模擬星圖去除恒星背景提取目標的基本原理如圖1所示,通過實時引導信號傳輸到地基跟蹤轉臺對空間目標進行拍照,同時根據拍攝參數(曝光時刻、方位俯仰、測站天文坐標)生成對應視場的模擬星圖,即光測設備每拍攝一張照片,對應生成一張同視場的模擬星圖,然后利用模擬星圖生成掩模,對拍攝星圖進行去除恒星背景的處理,提取出空間目標,優勢在于利用一幀圖像和對應的模擬星圖就可以有效去除恒星背景提取空間目標。
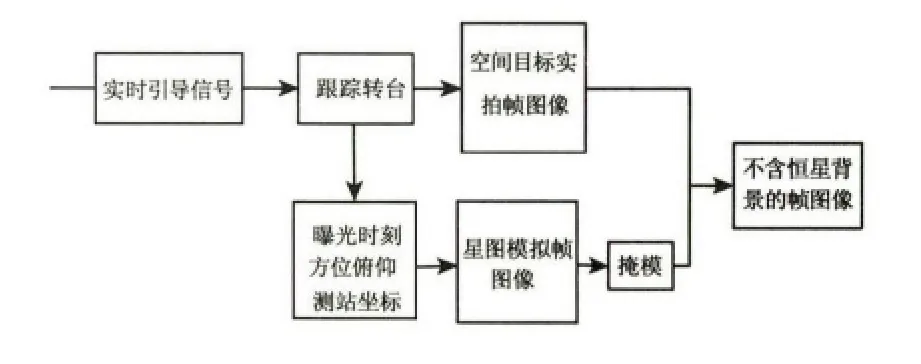
圖1 基于星圖模擬提取空間目標原理圖
這種方法的關鍵技術在于高精度星圖模擬,針對地基觀測設備星圖模擬主要有坐標系變換、視場星選取、星體赤道坐標修正三個步驟,并給出了利用模擬星圖提取空間目標的實驗結果。
3 坐標系變換
3.1 光軸指向計算
星圖模擬首先需要確定光軸指向對應的赤道坐標。根據觀測站的地理坐標、曝光時刻和光軸的方位俯仰可推算出光軸指向對應的赤經赤緯。各坐標系之間的關系如圖2所示,其中(λ,)表示測站天文坐標,(h,A)表示光軸高度角方位角,(LHA,δ)表示恒星地方時角坐標,(α,δ)表示光軸指向赤道坐標,GMST(Greenwich mean sidereal time)表示格林尼治恒星平時[4]。

圖2 坐標系轉換關系
陰影部分為球面三角形,球面三角形PAS中內角K未知,由球面正弦定理可得一組方程:
由球面余弦定理可得兩組方程:
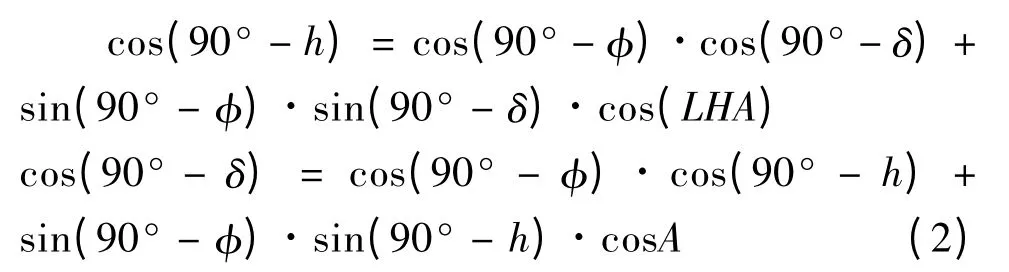
時角、格林尼治恒星平時、赤道經度以及地理經度的關系為:

3.2 赤道坐標到焦平面坐標變換
光軸指向計算中求得的赤道坐標為站心赤道坐標,星體站心赤道坐標系和相機坐標系轉換只有旋轉變換,其關系為:

其中,(Xi,Yi,Zi)為星點在相機坐標系的坐標,(xi,yi,zi)為星點在赤道坐標系的直角坐標表示,(αi,δi)為星點的赤經赤緯。
設由式(1)(2)(3)求出的光軸指向的赤道坐標為(α0,δ0),旋轉矩陣可表示為[5]:

其中,0表示橫滾角,橫滾角由相機安裝方式決定,一般情況下固定不變。

圖3 相機坐標系和圖像坐標系映射關系
相機坐標系和圖像坐標系的映射關系忽略鏡頭的畸變影響,其坐標系變換如圖3所示,滿足相似三角形原理,則圖像坐標系星點坐標(xi',yi')可表示為:
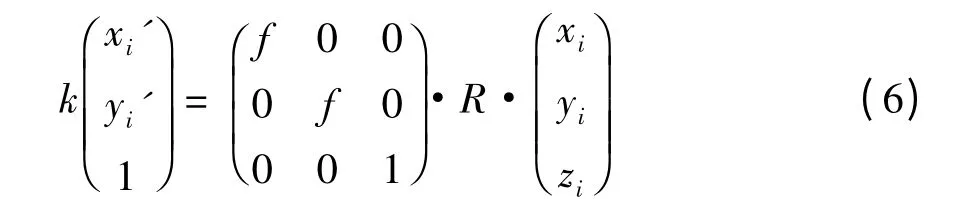
系數k,由第i顆星的Zi決定。已知CCD上光軸對應的像素為(u0,v0),像元尺寸為(dx,dy),星點對應的像素坐標(ui,vi)為:

4 視場星的選取
為保證能夠去除星圖中所有恒星背景,應選擇完備導航星庫,第谷第二星表涵蓋了99%的11.0等以下的恒星,當光測設備具有較強的探測能力時,應選擇第谷第二星表制作模擬星庫。本文實驗中,拍攝星圖曝光時間短,只拍攝到了較亮的星,所以選取了依巴谷星表[6]中亮于9星等的星作為模擬星庫。
視場為矩形視場,選定光軸指向附近較大范圍內的星,先進行投影變換,再檢測投影變換后的坐標是否在指定的像素坐標范圍內,處于邊界附近的星,考慮到星點成像的半徑,可能出現星點質心在視場范圍內,而像點部分像素溢出視場邊緣,因此在對投影變換后的星像點選取時,對于星點質心坐標處于圖4中陰影范圍r內的星也予以剔除,r由恒星像點半徑決定。
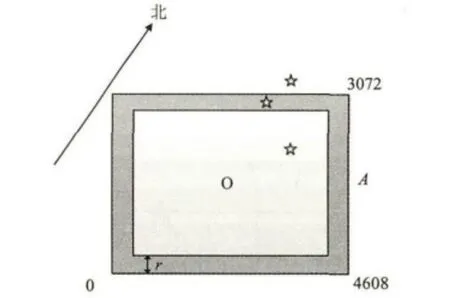
圖4 視場星選取示意圖
確定像點位置后,還需模擬星等亮度,星等轉為灰度大小和像點大小[7],灰度大小G和像點半徑R(單位:像素)與星等M的關系采用簡單線性變換,變換公式為:


像點在以質心為中心半徑為R的范圍內服從標準差為1的高斯分布,R由統計實拍星圖星點大小得出,考慮到實拍星圖與模擬星圖星點位置誤差,通過形態學膨脹處理,模擬星圖生成的星點半徑R大于實拍星圖中的星點半徑4個像素。
5 星體赤道坐標修正
上述坐標系變換用到的星體赤道坐標是以測站為中心的赤道坐標(站心坐標),而依巴谷星表提供的星體赤道坐標是太陽系質心(日心)J2000時刻的赤道坐標,因此需要將星表中的J2000時刻日心赤道坐標轉為當前時刻的站心坐標,其計算流程如圖5所示。
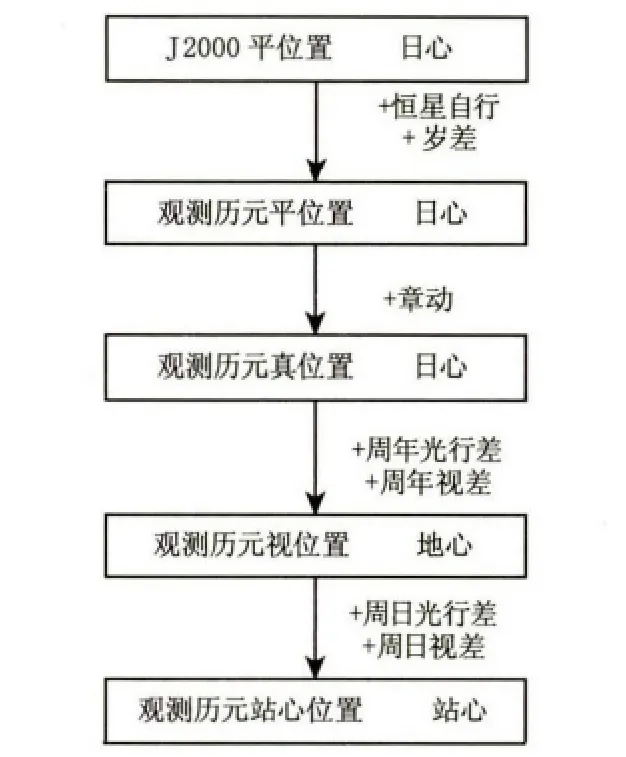
圖5 星體赤道坐標修正流程圖
其中恒星周年視差均小于1″[8],由于地球半徑遠小于公轉軌道半徑,所以周日視差可以忽略不計。周日光行差由地球自轉造成,與測站位置有關,為方便計算,在計算時不修正恒星的赤經赤緯,而是修正恒星的地平坐標[9],修正大小均小于0.32″。設備所用相機一個像素對應的視場角約為4.1″,因此周年視差、周日視差和周日光行差對模擬星圖恒星位置的影響不足1/3個像素,模擬星圖用來生成掩模,不用來做精確計算,其精度滿足去除恒星背景的需求。計算結果相當于忽略了周年視差影響的觀測歷元視位置。
恒星自行、光行差參考了文獻[4],歲差章動模型采用了IAU2000A歲差章動模型[10],限于篇幅這里不再討論具體計算過程,對獵戶座的參一(星號26727)、參二(星號26311)、參三(星號25930)星宿給出2014年10月10日世界時0時的視位置計算結果,對比《2014中國天文年歷》(恒星視位置坐標)結果給出計算精度,如表1所示。

表1 視位置計算結果比較
6 實驗結果
設備所用相機的分辨率為4608×3072,CMOS尺寸32 mm×24 mm,鏡頭焦距為391.3 mm,口徑140 mm。北京時間2013年11月18日0時27分57秒(計算時需轉為世界時)拍攝的獵戶座星圖如圖6所示,由于拍攝的星圖中并沒有空間目標,在拍攝星圖中添加一個亮點作為空間目標來提取(圖中用圓圈所標記亮點)。方位俯仰:(146.51727°,43.33358°),橫滾角:-26.33001°,測站坐標:(116.4075°,39.9040°),修正大氣蒙差后的方位俯仰:(146.51727°,43.32331°),求得光軸指向為(83.95605°,-1.450843°),將星表J2000平位置坐標轉為當前紀元視位置坐標,選取星點得到模擬星圖如圖7所示。

圖6 添加了目標的拍攝星圖

圖7 模擬星圖
利用模擬星圖生成掩模,對拍攝星圖去除恒星的處理結果如圖8所示。結果顯示恒星背景得到了有效地去除,提取出了添加的亮點目標。對拍攝星圖標記星點1~7(如圖9所示)進行像素坐標誤差統計[11],結果如表2所示。

圖8 目標提取結果

圖9 拍攝星圖恒星標記
由上述數據可以看出,視場中心附近實拍星圖和模擬星圖星點坐標誤差較小,視場邊緣坐標誤差較大,產生以上誤差主要原因有:①轉臺碼盤輸出的方位俯仰與光軸實際的方位俯仰的誤差,屬于系統誤差;②投影變換中未考慮鏡頭畸變,導致視場邊緣坐標誤差較大;③大氣情況復雜,大氣蒙差校正有誤差。本文中未作以上修正,通過形態學膨脹處理確定了模擬星圖星點半徑R,使模擬星圖生成的掩模能夠去除質心位置有偏差的實拍星圖的星點背景。下一步工作中可對鏡頭畸變導致的誤差進行精確修正,使模擬星圖恒星所占的像素大小與實拍星圖恒星所占像素更加接近,可預防當空間目標與恒星相近鄰時,由于模擬星點太大而將空間目標像點的部分去除。同時還應考慮行星的影響,以降低目標檢測虛警率。

表2 像素坐標誤差統計
7 結論
實驗證明用地基光測設備探測空間目標時,只需獲取每幀圖像的曝光時刻、測站天文坐標、設備光軸方位俯仰,就可通過星圖模擬生成的掩模有效去除恒星背景,提取出幀圖像中的空間目標圖像。此方法不依賴于相鄰幀圖像之間的關系,利用一幀圖像和對應的模擬星圖就可以提取空間目標,具有較強實用性。
[1] LIAO Bin.Research of the targets detection in the sky background[D].Changsha:National University of Defense Technology,2002.(in Chinese)廖斌.星空背景下的目標檢測研究[D].長沙:國防科技大學,2002.
[2] SHAO Xiujuan,HU Bingliang,YAN Peng.Research on target recognition algorithm for microspacecraft[J].Modern Electronics Technique,2010(4):163-165.(in Chinese)邵秀娟,胡炳樑,閆鵬.星空背景中目標識別算法研究[J].現代電子技術,2010(4):163-165.
[3]ZHANG Chunhua,ZHOU Xiaodong,CHEN Weizhen.Target trace acquisition method of star images based on background elimination[J].Infrared and Laser Engineering,2008,37(1):143-146.(in Chinese)張春華,周曉東,陳維真.基于背景抑制的星空圖像目標運動軌跡提取[J].紅外與激光工程,2008,37(1):143-146.
[4] Meeus J H.Astronomical algorithms[M].Willmann-Bell:Incorporated,1998.
[5] ZHANG Guangjun.Star Identification[M].Beijing:National Defense Industry Press,2011.(in Chinese)張廣軍.星圖識別[M].北京:國防工業出版社,2011.
[6] Data-sharing Network of Astronomy Science[DB/OL].http://lamost. geodata. cn/Portal/dataCatalog/dataList.jsp.2014-04-20.(in Chinese)天文數據分中心[DB/OL].http://lamost.geodata.cn/Portal/dataCatalog/dataList.jsp.2014-04-20.
[7]CHEN Weizhen,ZHANGChunhua,WANGXuewei,et al.Moving target simulation of space observation serial images[J].Laser&Infrared,2008,38(3):300-303.(in Chinese)陳維真,張春華,王學偉,等.空間觀測序列圖像目標運動成像仿真[J].激光與紅外,2008,38(3):300-303.
[8] WANG Anguo,JIA Chuanying,SUN Peng.Precise apparent position calculation of star in navigation[J].Journal of Traffic and Transportation Engineering,2004,4(4):117-120.(in Chinese)王安國,賈傳熒,孫鵬.航用恒星視位置高精度計算[J].交通運輸工程學報,2004,4(4):117-120.
[9] ZHANG Chao.System-level development and application research on astronomic surveying system base on electronic theodolites[D].Zhengzhou:PLA Information Engineering University,2009.(in Chinese)張超.基于電子經緯儀的天文測量系統及應用研究[D].鄭州:鄭州信息工程大學,2009.
[10]McCarthy D D,Petit G.IERS conventions(2003)[R].International Earth Rotation and Reference Systems Service(IERS)(GERMANY),2004.
[11]LI Deliang,RUAN Jin.Method adapting to the star sensor’s star extraction[J].Laser&Infrared,2009,39(12):1348-1350.(in Chinese)李德良,阮錦.一種適用于星敏感器的星點提取方法[J].激光與紅外,2009,39(12):1348-1350.
