直流多落點系統(tǒng)自抗擾附加阻尼控制
2015-04-06 06:33:53李從善劉天琪劉利兵李興源李文峰
電工技術(shù)學(xué)報 2015年7期
關(guān)鍵詞:系統(tǒng)
李從善 劉天琪 劉利兵 李興源 李文峰
(1.四川大學(xué)電氣信息學(xué)院 成都 6100652.國網(wǎng)河南省電力公司經(jīng)濟技術(shù)研究院 鄭州 450052)
?
直流多落點系統(tǒng)自抗擾附加阻尼控制
李從善1劉天琪1劉利兵1李興源1李文峰2
(1.四川大學(xué)電氣信息學(xué)院 成都 6100652.國網(wǎng)河南省電力公司經(jīng)濟技術(shù)研究院 鄭州 450052)
提出將自抗擾控制技術(shù)應(yīng)用到直流多落點系統(tǒng),通過其附加控制以提高系統(tǒng)的阻尼水平。首先采用擾動測試法,找出系統(tǒng)的最佳控制地點。然后采用總體最小二乘-旋轉(zhuǎn)不變技術(shù)(TLS-ESPRIT)辨識出系統(tǒng)數(shù)學(xué)模型,根據(jù)奇異值降階理論對系統(tǒng)降階,降階后得到二維低階被控系統(tǒng),并將其轉(zhuǎn)換為狀態(tài)空間形式,據(jù)此設(shè)計出抑制系統(tǒng)低頻振蕩的HVDC自抗擾附加阻尼控制器。由于自抗擾控制技術(shù)具有對系統(tǒng)擾動實時估計性能,并將估計出的實時擾動量補償?shù)娇刂浦腥ィ虼嗽摽刂破骶哂斜痊F(xiàn)有常規(guī)控制器抗擾動能力強的優(yōu)點。以三直流三機和四機兩區(qū)域系統(tǒng)為例進行時域仿真,結(jié)果表明HVDC自抗擾附加控制器相比傳統(tǒng)PID控制器具有更強的魯棒性。
自抗擾控制器 直流多落點系統(tǒng) 低頻振蕩 漢克爾奇異值降階
0 引言
直流作為大規(guī)模遠距離送電手段,因具有高效、經(jīng)濟及快速可控等優(yōu)點而得到廣泛應(yīng)用[1]。通過直流聯(lián)絡(luò)線附加控制可增加對交流系統(tǒng)機電振蕩的阻尼,提高系統(tǒng)穩(wěn)定性[2]。國內(nèi)外學(xué)者在直流系統(tǒng)參與電網(wǎng)穩(wěn)定控制領(lǐng)域開展了大量研究。主要集中在反饋線性化方法[3-5]、滑模變結(jié)構(gòu)控制[6-9]、非線性魯棒控制[10-12]及非線性自適應(yīng)控制[12,13]。上述控制方法對交直流系統(tǒng)穩(wěn)定性具有明顯改善,但對模型攝動強烈、系統(tǒng)模型參數(shù)不準(zhǔn)確或存在大的擾動情況,其控制能力具有一定局限性。滑模變結(jié)構(gòu)控制對系統(tǒng)參數(shù)的攝動和外部干擾具有較強的魯棒性,其缺點在于控制規(guī)律因高速切換而存在高頻抖動。
自抗擾控制技術(shù)(Active Disturbance Rejection Control,ADRC)[14-18]由中國科學(xué)院數(shù)學(xué)與系統(tǒng)科學(xué)研究院系統(tǒng)科學(xué)研究所研究員韓京清提出,該控制方法以PID控制為基礎(chǔ)并加以改進形成。通過對整定值設(shè)置合適的過渡過程,一定程度上解決了控制超調(diào)和快速性之間的矛盾;將傳統(tǒng)PID控制的誤差反饋線性組合形式發(fā)展到非線性形式,可實現(xiàn)比例、積分、微分三者的最佳組合方式;并采用擴張狀態(tài)觀測器實時估計出系統(tǒng)擾動,將其補償?shù)娇刂浦校岣吡丝刂频目箶_動性能和魯棒性能。因此ADRC控制具有“超調(diào)小、響應(yīng)速度快、抗擾性強”等優(yōu)點。對自抗擾控制器的基本原理和結(jié)構(gòu)進行了詳細分析,并將其運用到直流附加控制上,以提高系統(tǒng)的穩(wěn)定性。在PSCAD中搭建三直流三機系統(tǒng),采用TLS-ESPRIT辨識方法辨識出系統(tǒng)數(shù)學(xué)模型,根據(jù)奇異值降階理論將系統(tǒng)降為二階系統(tǒng),然后轉(zhuǎn)換為狀態(tài)空間形式,以此設(shè)計出自抗擾控制器,并在直流傳統(tǒng)主控制基礎(chǔ)上搭建自抗擾附加控制器。通過與傳統(tǒng)PID控制進行對比,驗證了該方法具有很強的魯棒性。由于該控制方法能夠?qū)ο到y(tǒng)的內(nèi)外擾動進行實時的估計補償,因此將高階被控系統(tǒng)降為二階系統(tǒng)所帶來的系統(tǒng)模型不準(zhǔn)確性可由擴張狀態(tài)觀測器加以補償,這樣可使被控系統(tǒng)的維數(shù)很低,給控制器的設(shè)計帶來方便。因此具有較好的實用性。
1 自抗擾控制器基本原理
1.1 自抗擾控制器基本思想
自抗擾控制器的核心是將系統(tǒng)的不確定部分和內(nèi)擾外擾擴張成系統(tǒng)的狀態(tài)量,并依此建立擴張狀態(tài)觀測器,估計其對系統(tǒng)的實時作用量,進而補償?shù)娇刂破髦校瑥亩鴮崿F(xiàn)反饋線性化[18]。由此,將非線性系統(tǒng)轉(zhuǎn)換為標(biāo)準(zhǔn)線性系統(tǒng)的積分串聯(lián)型系統(tǒng)。設(shè)系統(tǒng)數(shù)學(xué)模型的一般表達式為
(1)

(2)
選擇控制量為
(3)
則非線性系統(tǒng)可轉(zhuǎn)換為線性系統(tǒng)
(4)
1.2 自抗擾控制器結(jié)構(gòu)及各部分功能
以二階自抗擾控制器為例,其控制結(jié)構(gòu)如圖1所示。由4部分構(gòu)成:
1)安排過渡過程。由整定值v0安排過渡過程v1并得到其微分信號v2,采用跟蹤微分器(Tracking Differentiator,TD)實現(xiàn)。對整定值安排合適的過渡過程,可在一定程度上解決超調(diào)和快速性之間的矛盾。
2)擴張狀態(tài)觀測器(Extended State Observer,ESO)。根據(jù)被控對象的輸出y和輸入u估計對象的狀態(tài)量z1、z2和作用于對象的總和擾動量z3。
3)狀態(tài)誤差的非線性反饋(Nonlinear State Error Feedback,NLSEF)。狀態(tài)誤差e1=v1-z1,e2=v2-z2,由誤差e1、e2的非線性組合確定控制量u0。
4)擾動估計補償。將擾動估計值z3補償?shù)椒答伩刂屏縰0中形成最終控制量u。

圖1 自抗擾控制器結(jié)構(gòu)圖Fig.1 ADRC structure
2 直流多落點系統(tǒng)控制敏感點確定
由文獻[19,20]可知,對于直流多落點系統(tǒng),由于直流在系統(tǒng)中所處位置的不同會影響其附加控制對系統(tǒng)振蕩的抑制效果。因此,當(dāng)系統(tǒng)存在擾動時,采用HVDC附加控制對系統(tǒng)振蕩抑制時,必存在最佳的一條HVDC,即控制敏感點。控制敏感點的選取可通過控制敏感因子指標(biāo)來確定。其計算式為
(5)
式中,Δδ為主振模態(tài)對應(yīng)的強相關(guān)機組的功角變化量;ΔP為直流參考功率施加的擾動量。控制敏感因子越大,即在該直流施加附加控制,其抑制振蕩效果越好。具體求取步驟如下:
1)通過TLS-ESPRIT算法[21]辨識得到系統(tǒng)振蕩模態(tài),并篩選出主振模態(tài),選出與主振模態(tài)相對應(yīng)的強相關(guān)機組。
2)分別在不同直流上施加相同擾動ΔP,測出強相關(guān)機組間的功角變化量。
3)計算控制敏感因子,控制敏感因子最大值對應(yīng)的直流為最佳的控制地點。
[20],在PSCAD中搭建三直流三機輸電系統(tǒng),拓撲結(jié)構(gòu)如圖2所示。該系統(tǒng)中,三條直流線路均采用標(biāo)準(zhǔn)的CIGRE模型,直流系統(tǒng)主控制器采用傳統(tǒng)PI控制,控制方式為整流側(cè)定直流電流、逆變側(cè)定關(guān)斷角。直流線路每回功率為Pdc=1 000 MW,Vdc=500 kV。發(fā)電機模型均采用詳細六階模型且都包含勵磁和調(diào)速系統(tǒng),都未裝電力系統(tǒng)穩(wěn)定器。發(fā)電機G1和G3的額定容量相等為700 MV·A,G2為512 MV·A。慣性時間常數(shù)H=6.5。
在圖2所示的仿真系統(tǒng)中施加擾動,1 s時節(jié)點4突然失去負荷,持續(xù)0.5 s后恢復(fù)。分別測出G1、G2、G3的功角變化曲線如圖3所示。
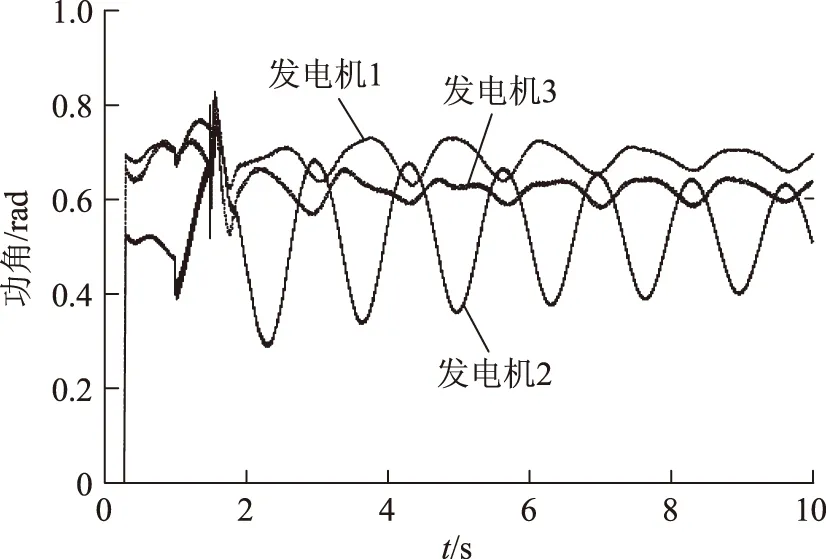
圖3 3臺發(fā)電機功角振蕩曲線Fig.3 Power angle curves of three generators
采用prony辨識方法得到系統(tǒng)的主振模態(tài)及各臺發(fā)電機的初相角,如表1所示。
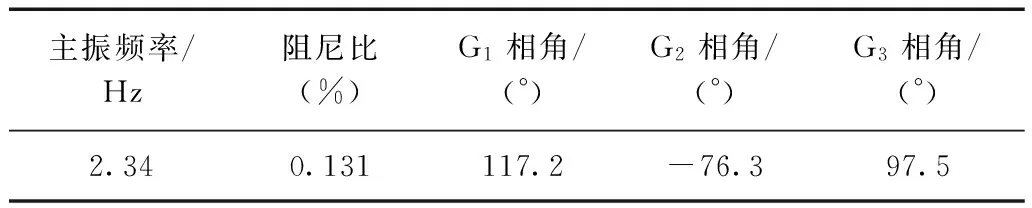
表1 三直流三機系統(tǒng)主振模式Tab.1 Oscillation modes of three HVDC transmission system with three alternators
由表1可見,發(fā)電機G2初相角與G1、G3相差近180°。以G2與G1、G3頻率差為觀測目標(biāo),在無直流附加控制下,分別在3條直流上施加50 MW的功率波動,選取Δω23為觀測目標(biāo)。通過式(5)計算得到各條直流的控制敏感因子如表2所示。
由表2可見,HCDC3的控制敏感因子明顯大于HVDC1和HVDC2,由此得出HVDC3是系統(tǒng)的最佳控制點。
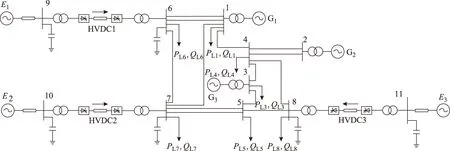
圖2 三直流三機輸電系統(tǒng)
Fig.2 Three HVDC transmission system with three alternators

表2 三直流三機系統(tǒng)控制敏感因子Tab.2 Control sensitive factor of three HVDC transmission system with three alternators
3 直流多落點系統(tǒng)自抗擾附加控制器設(shè)計
3.1 系統(tǒng)模型辨識
在圖2所示直流系統(tǒng)整流側(cè)定電流控制信號上施加階躍擾動作為輸入信號,以發(fā)電機G2與G3轉(zhuǎn)子角速度偏差Δω23為輸出。采用TLS-ESPRIT算法辨識系統(tǒng)的數(shù)學(xué)模型。以HVDC3直流為例,辨識得到傳遞函數(shù)為
(6)
式中,y為角速度偏差Δω23。系統(tǒng)的零極點分布如圖4所示。
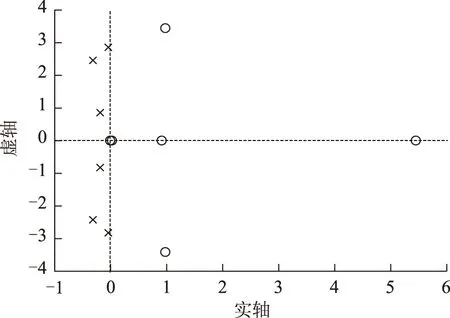
圖4 零極點分布Fig.4 Pole-zero map
采用漢克爾奇異值降階理論對系統(tǒng)降階。首先計算每個模態(tài)的相對能量,如圖5所示。
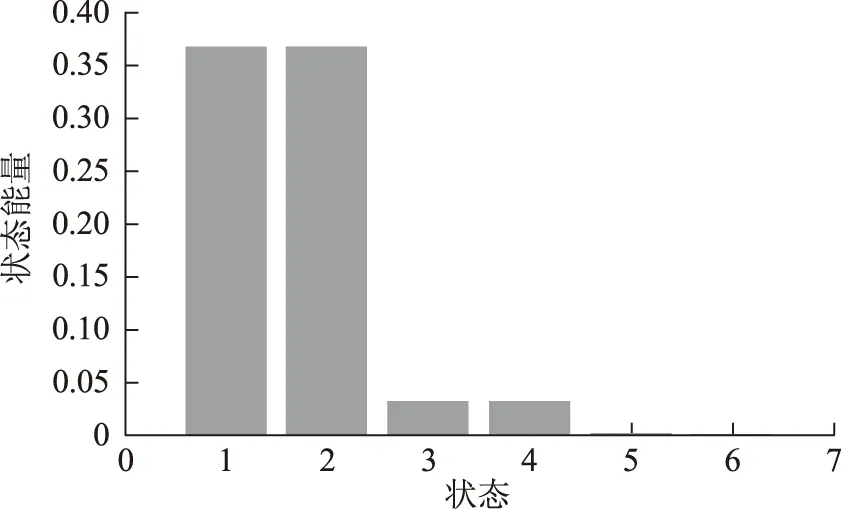
圖5 漢克爾奇異值Fig.5 Hankel singular values
漢克爾奇異值反映了所對應(yīng)的狀態(tài)量對系統(tǒng)輸入/輸出的影響。較小的漢克爾奇異值,其所對應(yīng)的狀態(tài)量對系統(tǒng)影響較小,將4個較小的漢克爾奇異值對應(yīng)的狀態(tài)量剔除,得到二階傳遞函數(shù)為
(7)
降階前后系統(tǒng)的階躍響應(yīng)如圖6所示。由圖6可知,階躍響應(yīng)曲線雖然存在一定偏差,但保留了系統(tǒng)的主要特征,而由降階導(dǎo)致的系統(tǒng)模型的不確定性,可通過擴張狀態(tài)觀測器對其補償。
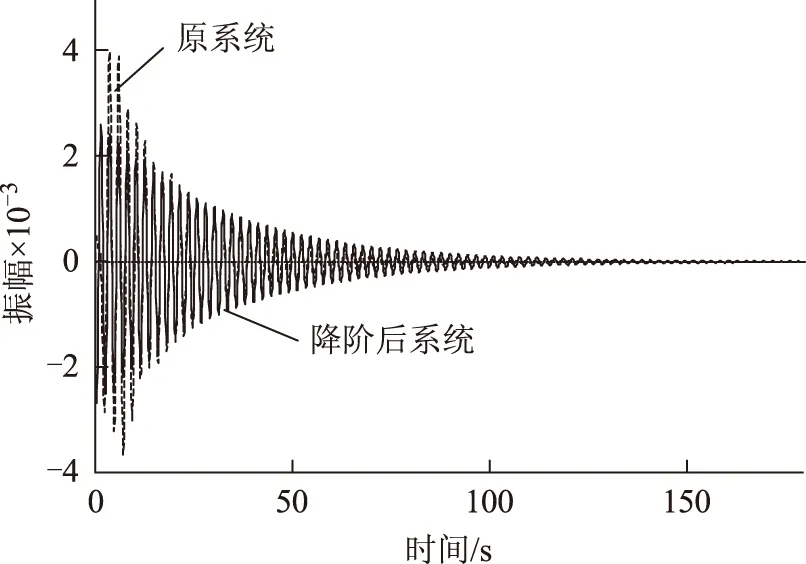
圖6 系統(tǒng)降階前后階躍響應(yīng)Fig.6 Step response of controller and reduced-order controller of the system
3.2 自抗擾附加控制器設(shè)計
以降階得到的二階傳遞函數(shù)為控制對象,首先將傳遞函數(shù)轉(zhuǎn)換為微分方程形式為
(8)
式中,a1=0.034 82,a0=8.306,b2=0.000 655 8,b1=0.007 66,b0=-6.276×10-18。令u1=0,若系統(tǒng)存在外擾以及由參數(shù)攝動引起的系統(tǒng)的不確定部分,統(tǒng)記為w(t)。則式(8)變?yōu)?/p>
(9)

(10)
式中,a(t)為w(t)的導(dǎo)數(shù)。對式(10)建立擴張狀態(tài)觀測器為
(11)
式中,z1、z2和z3分別為狀態(tài)量x1、x2和x3的觀測值;β1、β2、β3為一組觀測器參數(shù);fal(·)是非光滑函數(shù)
(12)
式中,0<α≤1,一般情況下取1;δ由采樣步長決定。
采用TD算法對整定值安排過渡過程
(13)
式中,h為采樣頻率;r0為決定過渡過程快慢的參數(shù),函數(shù)fhan(x1,x2,r0,h)算法為
(14)
控制量u0通過誤差的NLSEF得到
(15)
式中,c、r、h1為可調(diào)參數(shù);fhan算法同式(14)。
通過將觀測器估計出的系統(tǒng)擾動補償?shù)娇刂屏縰0中,形成最終控制量u
(16)
自抗擾附加控制器控制結(jié)構(gòu)如圖7所示。
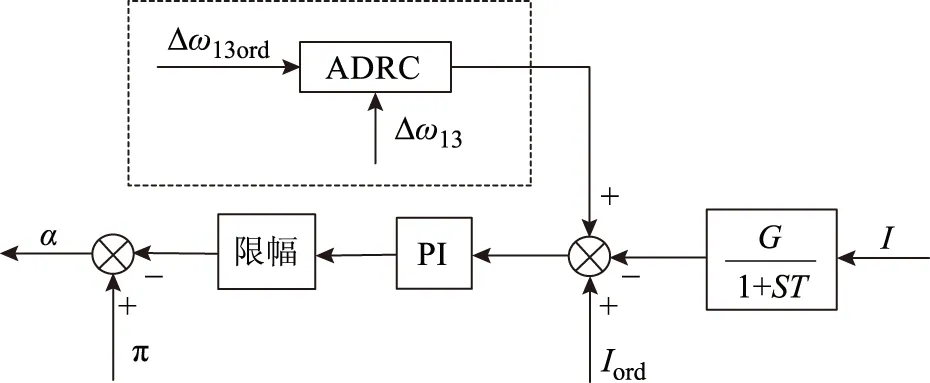
圖7 HVDC自抗擾附加控制器結(jié)構(gòu)圖Fig.7 Diagram of ADRC of HVDC systems
3.3 自抗擾控制器參數(shù)整定
自抗擾控制器涉參數(shù)較多,但從自抗擾控制器的原理和結(jié)構(gòu)看,自抗擾控制器的各組成部分獨立地實現(xiàn)相應(yīng)的功能,可按照“分離性原理”獨立整定參數(shù),以簡化自抗擾控制器的設(shè)計[18]。由分離性原則最終可確定ADRC參數(shù)整定公式為
(17)
由此,除擾動補償因子b0外,其他參數(shù)都可通過式(17)得到。參數(shù)b0一般取與系統(tǒng)參數(shù)b相等,且適當(dāng)加大b0值可有效補償擾動和模型的不確定因素。
3.4 傳統(tǒng)PID控制器設(shè)計
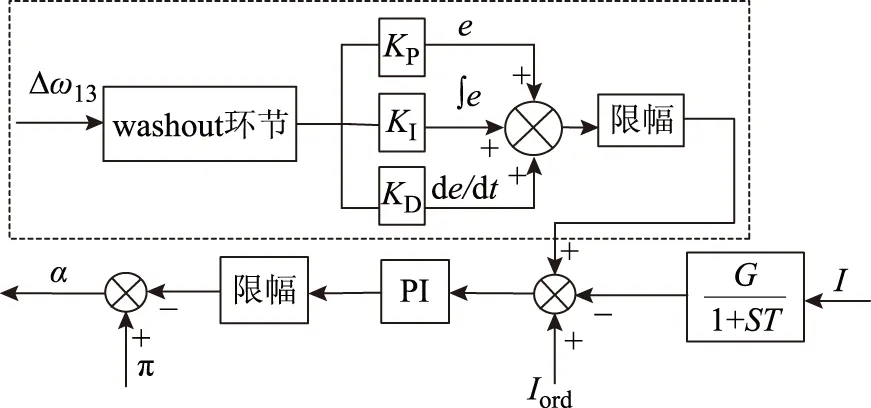
圖8 傳統(tǒng)PID控制器結(jié)構(gòu)圖Fig.8 Structure diagram of traditional PID controller
4 仿真分析
4.1 控制敏感點驗證
2s時刻,母線4處發(fā)生三相短路故障,持續(xù)0.5s
恢復(fù)。以發(fā)電機G2、G3的轉(zhuǎn)子角速度偏差變化作為控制目標(biāo),分別在無直流調(diào)制下和三條直流分別調(diào)制時進行仿真,直流調(diào)制采用經(jīng)典PID控制。控制效果如圖9所示。
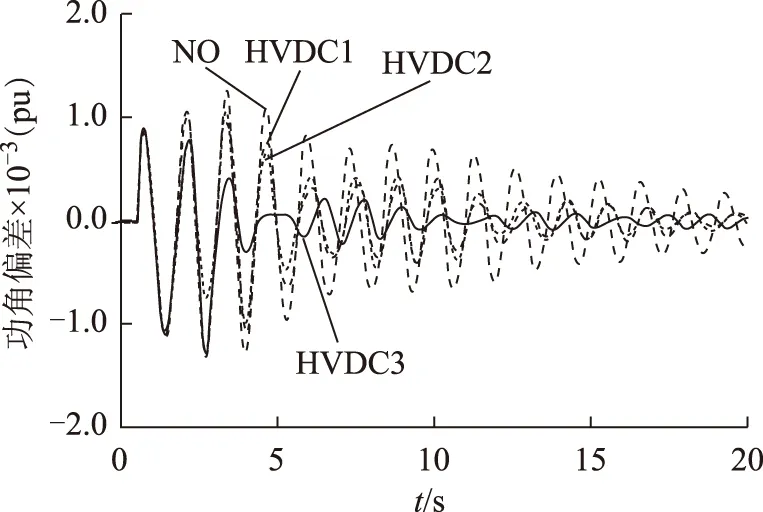
圖9 不同直流調(diào)制下Δω23Fig.9 Diagram of Δω23 under different DC modulation
由圖9可見,各條直流附加控制均一定程度上對系統(tǒng)振蕩起到了抑制效果,但HVDC3抑制效果明顯好于HVDC2和HVDC1。驗證了控制敏感點選取的正確性。
4.2 傳統(tǒng)PID控制與ADRC控制效果對比
1)仿真分析1
為驗證ADRC方法的有效性,在圖2的仿真系統(tǒng)中分別施加兩種形式的擾動,與傳統(tǒng)的PID控制進行對比。仿真時PID控制器參數(shù)比例增益KP=50,積分時間常數(shù)Ti=11 s,微分時間常數(shù)Td=2.7 s。ADRC控制器的參數(shù)r0=1,[β1,β2,β3]=[100,3 333,313],r=5 000,h1=0.05,b0=1。
擾動1:1 s時節(jié)點4突然失去負荷,持續(xù)0.5 s后恢復(fù)。由擴張觀測器估計的實時擾動量z3如圖10所示。自抗擾控制器與傳統(tǒng)PID控制器對系統(tǒng)振蕩的抑制效果對比如圖11所示。
擾動2:2s時刻,整流側(cè)定電流控制器的電流整定值由1pu減小至0.95pu。由擴張觀測器估計的實時擾動量z3如圖12所示。自抗擾控制器與傳統(tǒng)PID控制器對區(qū)域間低頻振蕩的抑制效果對比如圖13所示。
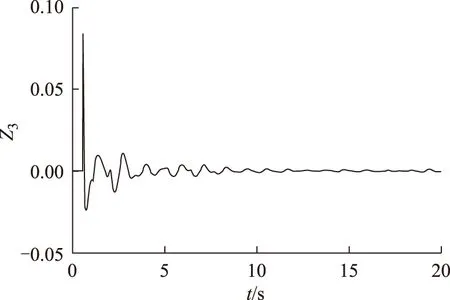
圖10 擾動1時z3Fig.10 Diagram of z3 under the first disturbance
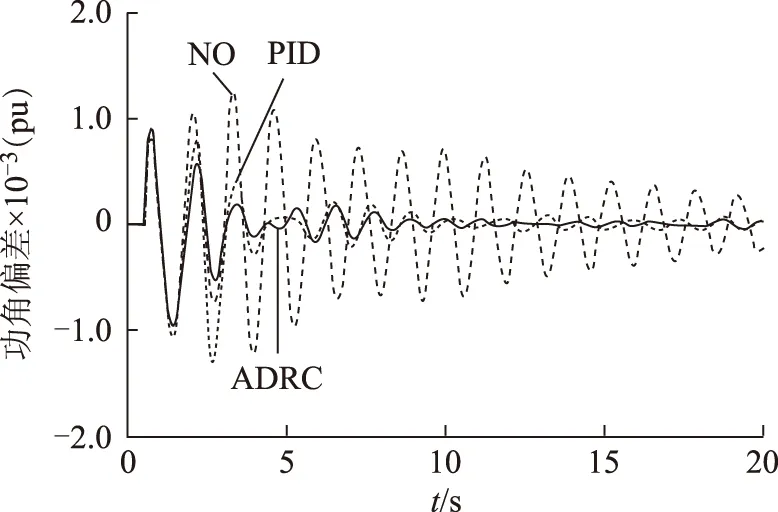
圖11 擾動1時Δω23Fig.11 Diagram of Δω23 under the first disturbance
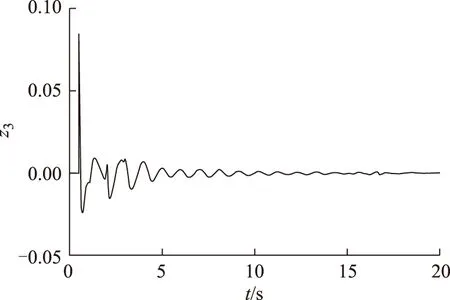
圖12 擾動2時z3Fig.12 Diagram of z3 under the second disturbance
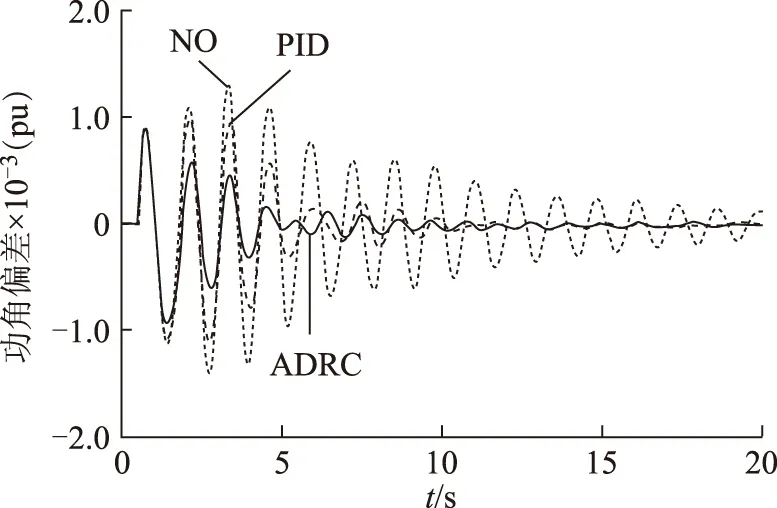
圖13 擾動2時Δω23Fig.13 Diagram of Δω23 under the second disturbance
由圖11、圖13可見,當(dāng)系統(tǒng)發(fā)生擾動時,傳統(tǒng)PID和ADRC都對系統(tǒng)的振蕩均具有抑制效果。但相比傳統(tǒng)PID控制器,HVDC自抗擾附加控制器具有超調(diào)小、穩(wěn)定快的優(yōu)點,證明了該控制器的有效性和魯棒性。
2)仿真分析2
為進一步驗證ADRC控制器的適應(yīng)性,以四機兩區(qū)域交直流并聯(lián)系統(tǒng)為例,系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)和詳細參數(shù)見文獻[22],仿照算例分析1,分別搭建PID控制器和ADRC控制器,以發(fā)電機G1和發(fā)電機G3的轉(zhuǎn)子角速度偏差變化作為控制目標(biāo),施加兩種形式的擾動,對比分析兩種控制器的控制效果。
擾動1:3s時刻,整流側(cè)定電流控制器的電流整定值由1pu減小至0.95pu。兩種控制器的控制效果如圖14所示。
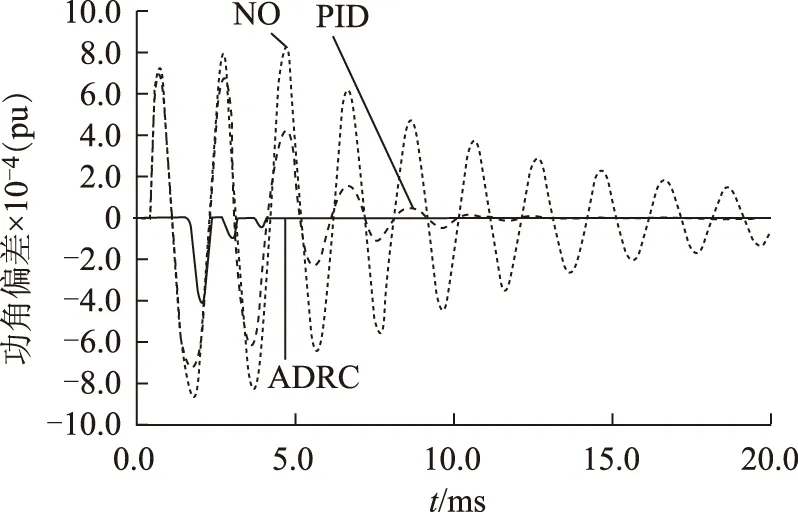
圖14 擾動1時Δω13Fig.14 Diagram of Δω13 under the first disturbance
擾動2:3s時刻,換流站2靠近母線節(jié)點發(fā)生單相短路接地故障,故障持續(xù)時間為0.1s。兩種控制器的控制效果如圖15所示。
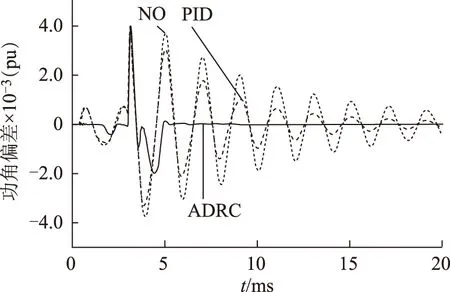
圖15 擾動2時Δω13Fig.15 Diagram of Δω13 under the second disturbance
通過對四機兩區(qū)域交直流并聯(lián)系統(tǒng)的進一步仿真分析,結(jié)果表明在直流附加控制中使用ADRC控制器可以提高系統(tǒng)阻尼水平的適用性和魯棒性。
5 結(jié)論
針對直流輸電系統(tǒng)簡化模型存在誤差以及現(xiàn)有控制器抗擾能力不足的問題,提出直流自抗擾附加控制器設(shè)計方法。由TLS-ESPRIT辨識出系統(tǒng)模型,根據(jù)奇異值理論對系統(tǒng)模型進行降階。以降階后的系統(tǒng)模型為基礎(chǔ),設(shè)計出抑制直流多落點系統(tǒng)低頻振蕩的HVDC自抗擾控制器。
ADRC是PID控制的改進,保留了其基于誤差消除誤差的精髓,并對整定值安排適當(dāng)?shù)倪^渡過程,一定程度上可消除控制的超調(diào)量;采用擴張狀態(tài)觀測器對系統(tǒng)的實時擾動量進行補償,實現(xiàn)控制的反饋線性化,并拓寬了控制器對參數(shù)攝動的適應(yīng)性。采用非線性反饋的適當(dāng)組合,是對以往線性組合的一種改進,可實現(xiàn)尋求更適合更有效的組合形式。因此,具有超調(diào)小、響應(yīng)速度快、控制準(zhǔn)確度高、抗擾性強等優(yōu)點。該控制器由于對模型的不確定性和內(nèi)外擾動具有實時補償作用,因此對系統(tǒng)模型的準(zhǔn)確性要求不高,該優(yōu)點是其他需要以系統(tǒng)準(zhǔn)確數(shù)學(xué)模型為基礎(chǔ)的控制方法所不具備的。需要說明的是,雖然該控制器不需要準(zhǔn)確的數(shù)學(xué)模型,但系統(tǒng)數(shù)學(xué)模型越準(zhǔn)確越能減輕觀測器的負擔(dān)。
以三直流三機輸電系統(tǒng)和四機兩區(qū)域交直流并聯(lián)系統(tǒng)為例進行了時域仿真,結(jié)果表明HVDC自抗擾附加控制器比傳統(tǒng)PID控制器具有更好的控制效果。被控系統(tǒng)采用奇異值理論降階后,系統(tǒng)模型更低,以此設(shè)計的控制器階數(shù)更低,便于工程實現(xiàn)。因此該控制方法具有一定的實用價值。
參考文獻
[1] 郭小江,馬世英,卜廣全,等.直流系統(tǒng)參與電網(wǎng)穩(wěn)定控制應(yīng)用現(xiàn)狀及在安全防御體系中的功能定位探討[J].電網(wǎng)技術(shù),2012,36(8):116-123.GuoXiaojiang,MaShiying,BuGuangquan,etal.PresentapplicationsituationofDCsystemparticipatinginpowersystemstabilitycontrolanddiscussiononpositionofitsfunctionsinsecuritydefensesystem[J].PowerSystemTechnology,2012,36(8):116-123.
[2] 李興源.高壓直流輸電系統(tǒng)的運行與控制[M].北京:科學(xué)出版社,2010.
[3] 李潔,孔維超,鐘彥儒.一種不引入零動態(tài)的異步電機反饋線性化控制[J].電工技術(shù)學(xué)報,2014,29(1):110-115.LiJie,KongWeichao,ZhongYanru.Feedbacklinearizationcontrolofinductionmachineswithoutintroducingzerodynamics[J].TransactionsofChinaElectrotechnicalSociety,2014,29(1):110-115.
[4] 王利兵,毛承雄,陸繼明,等.基于反饋線性化原理的直驅(qū)風(fēng)力發(fā)電機組控制系統(tǒng)設(shè)計[J].電工技術(shù)學(xué)報,2011,26(7):1-6,20.WangLibing,MaoChengxiong,LuJiming,etal.Feedback-linearizationcontrolofdirect-drivenpermanentmagnetsynchronousgeneratorwindturbines[J].TransactionsofChinaElectrotechnicalSociety,2011,26(7):1-6,20.
[5] 翁華,徐政,許烽,等.基于廣域測量信息的HVDC魯棒控制器設(shè)計[J].中國電機工程學(xué)報,2013,33(4):103-109.WengHua,XuZheng,XuFeng,etal.RobustdesignofHVDCsupplementarycontrollersbasedonWAMSsignals[J].ProceedingsoftheCSEE,2013,33(4):103-109.
[6]HuertaH,LoukianovAG,CanedoJM.Robustmultimaclainepowersystemscontrolviahighorderslidingmodes[J].ElectricPowerSystemsResearch,2011,8l(7):1602-1609.
[7]HuertaH,LoukianovAG,CaedoJM.Decentralizedslidingmodeblockcontrolofmultimachinepowersystems[J].InternationalJournalofElectricalPower&EnergySystems,2010,32(1):1-11.
[8] 郭旭剛,金新民,馬添翼,等.電網(wǎng)不平衡下基于滑模變結(jié)構(gòu)的三相電壓型PWM整流器恒頻控制[J].電力系統(tǒng)保護與控制,2013,41(10):126-133.GuoXugang,JinXinmin,MaTianyi,etal.Constantfrequencycontrolforthree-phasevoltagePWMrectifierunderunbalancedgridvoltageconditionsbasedonslidingmodecontrol[J].PowerSystemProtectionandControl,2013,41(10):126-133.
[9]LiY,RehtanzC,RubergS,etal.Wide-arearobustcoordinationapproachofHVDCandFACTScontrollersfordampingmultipleinterareaoscillations[J].IEEETransactionsonPowerDelivery,2012,27(3):1096-1105.
[10]阮陽,袁榮湘,萬黎,等.同步發(fā)電機的非線性魯棒電壓控制[J].電工技術(shù)學(xué)報,2012,27(9):9-16.RuanYang,YuanRongxiang,WanLi,etal.Nonlinearrobustvoltagecontrolforsynchronousgenerators[J].TransactionsofChinaElectrotechnicalSociety,2012,27(9):9-16.
[11]LiYong,RehtanzC,RübergS,etal.Wide-arearobustcoordinationapproachofHVDCandFACTScontrollersfordampingmultipleinterareaoscillations[J].IEEETransactionsonPowerDelivery,2012,27(3):1096-1105.
[12]SatoM,HonjoN,YamajiK,etal.HVDCconvertercontrolforfastpowerrecoveryafterACsystemfault[J].IEEETransactionsonPowerDelivery,1997,12(3):1319-1326.
[13]RostamkolaiN,PhadkeAG,LongWf,etal.AnadaptiveoptimalcontrolstrategyfordynamicstabilityenhancementofAC/DCpowersystems[J].IEEETransactionsonPowerSystems,1988,3(3):1139-1145.
[14]韓京清.自抗擾控制技術(shù)[J].前沿科學(xué),2007,1(1):24-31.HanJingqing.Autodisturbancerejectioncontroltechnique[J].FrontierScience,2007,1(1):24-31.
[15]鄧文浪,令弧文娟,朱建林.應(yīng)用自抗擾控制器的雙級矩陣變換器閉環(huán)控制[J].中國電機工程學(xué)報,2008,28(18):13-19.DengWenlang,LinghuWenjuan,ZhuJianlin.Closed-controlfortwo-stagematrixconverterbasedonauto-disturbancerejectioncontroller[J].ProceedingsoftheCSEE,2008,28(18):13-19.
[16]韓京清.從PID技術(shù)到“自抗擾控制”技術(shù)[J].控制工程,2002,9(3):13-18.HanJingqing.FromPIDtechniquetoactivedisturbancesrejectioncontroltechnique[J].ControlEngineeringofChina,2002,9(3):13-18.
[17]丁祖軍,劉保連,張宇林.基于自抗擾控制技術(shù)的有源電力濾波器直流側(cè)電壓優(yōu)化控制[J].電網(wǎng)技術(shù),2013,37(7):2030-2034.DingZujun,LiuBaolian,ZhangYulin.OptimalcontrolforDCsidevoltageofactivepowerfilterbasedonAuto-Disturbancerejectioncontrol[J].PowerSystemTechnology,2013,37(7):2030-2034.
[18]韓京清.自抗擾控制技術(shù)-估計補償不確定因素的控制技術(shù)[M].北京:國防工業(yè)出版社,2013:255-261.
[19]王曦,李興源,王渝紅,等.基于TLS-ESPRIT辨識的多直流控制敏感點研究[J].電力系統(tǒng)保護與控制,2012,40(19):121-125.WangXi,LiXingyuan,WangYuhong,etal.Analysisoncontrollabilitysensitivepointsofmulti-HVDCsystemsbasedonTLS-ESPRITmethod[J].PowerSystemProtectionandControl,2012,40(19):121-125.
[20]郭利娜,劉天琪,程道衛(wèi),等.直流多落點系統(tǒng)控制敏感點挖掘技術(shù)研究[J].電力系統(tǒng)保護與控制,2013,41(10):7-12.GuoLina,LiuTianqi,ChengDaowei,etal.Studyondiggingthemostsensitivecontrolpointofmulti-terminalHVDCsystem[J].PowerSystemProtectionandControl,2013,41(10):7-12.
[21]蔣平,吳熙,羅曦.基于TLS-ESPRIT算法的附加勵磁阻尼控制抑制次同步振蕩[J].電力自動化設(shè)備,2009,29(10):25-29.JiangPing,WuXi,LuoXi.SSOmitigationusingsupplementaryexcitationdampingcontrollerbasedonTLS-ESPRIT[J].ElectricPowerAutomationEquipment,2009,29(10):25-29.
[22]KunderP.Powersystemstabilityandcontrol[M].NewYork:McGraw-Hill,1994.
李從善 男,1985生,博士研究生,研究方向為電力系統(tǒng)擾動監(jiān)測及穩(wěn)定與控制方面的研究。
劉天琪 女,1962生,教授,博士生導(dǎo)師,研究方向為高壓直流輸電、電力系統(tǒng)穩(wěn)定與控制方面的研究。(通信作者)
A Auto-disturbance Rejection Controller of Multi-HVDC
LiCongshan1LiuTianqi1LiuLibing1LiXingyuan1LiWenfeng2
(1.Electrical Engineering and Information College of Sichuan University Chengdu 610065 China 2.State Grid Electric Power Company of Henan Province Economic and Technology Research Institute Zhengzhou 450052 China)
The auto-disturbance rejection control(ADRC) technique is applied to the multi-HVDC system’s supplementary control to improve the damping level of system.Firstly,the best place of the control system is found using the disturbance test method.Then the total least squares estimation of the rotational invariance technique (TLS-ESPRIT) is used to identify the mathematical model of the system.Based on the singular value reduction theory,the system has been reduced to the two-dimensional low order system and transformed into a state space form.The ADRC supplementary damping controller for HVDC system’s low frequency oscillation is then designed.Because ARDC technique can estimate the disturbance of the system in real-time,which can also be compensated to the control system in real time,the controller has better anti disturbance ability than the existing conventional controller.A system with three HVDC and three generators is used as an example for the time domain simulation.The results show that the robustness of the ADRC controller for HVDC is higher than that of the traditional PID controller.
Auto disturbance rejection controller,multi-HVDC system,low frequency oscillation,singular value theory
國家電網(wǎng)公司科技重大專項(SGCC-MPLG027-2012)資助項目。
2014-11-15 改稿日期2015-01-14
TM7
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32