永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法
2015-04-06 06:34:58魯家棟劉景林衛(wèi)麗超
電工技術(shù)學(xué)報(bào) 2015年7期
魯家棟 劉景林 衛(wèi)麗超
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院 西安 710129)
?
永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法
魯家棟 劉景林 衛(wèi)麗超
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院 西安 710129)
針對(duì)永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)已有方法存在的電機(jī)“抖動(dòng)”、對(duì)電機(jī)參數(shù)依賴性強(qiáng)、高頻電流信號(hào)數(shù)學(xué)處理算法復(fù)雜等問(wèn)題,提出一種基于高頻電壓信號(hào)注入法的永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法。該方法通過(guò)對(duì)三相高頻電壓信號(hào)的電流響應(yīng)進(jìn)行低通濾波,比較三相電流響應(yīng)幅值的大小關(guān)系,依據(jù)轉(zhuǎn)子位置角θ對(duì)三相高頻電流響應(yīng)信號(hào)幅值的調(diào)制規(guī)律,得到電機(jī)轉(zhuǎn)子初始位置信息,最后利用電機(jī)磁路飽和效應(yīng)區(qū)分電機(jī)轉(zhuǎn)子NS極性。理論分析及實(shí)驗(yàn)表明,該方法能準(zhǔn)確檢測(cè)出電機(jī)轉(zhuǎn)子初始位置信息,電機(jī)轉(zhuǎn)子不會(huì)發(fā)生“抖動(dòng)”,檢測(cè)方法對(duì)電機(jī)參數(shù)依賴性低,電流處理算法簡(jiǎn)單,不需要額外增加硬件電路,檢測(cè)誤差較小,可滿足永磁同步電機(jī)的平穩(wěn)起動(dòng)要求。
永磁同步電機(jī) 轉(zhuǎn)子初始位置 高頻信號(hào)注入 磁路飽和效應(yīng)
0 引言
在永磁同步電機(jī)控制中,若不能預(yù)知轉(zhuǎn)子初始位置,就會(huì)出現(xiàn)轉(zhuǎn)子短暫反轉(zhuǎn)或失步而起動(dòng)失敗。絕對(duì)式光電編碼器可知轉(zhuǎn)子初始位置,但存在成本高、體積大的缺點(diǎn),在一定程度上限制了其應(yīng)用[1-7]。
目前,國(guó)內(nèi)對(duì)永磁同步電機(jī)初始位置檢測(cè)方法的研究很多,但都有其缺點(diǎn)。基于電機(jī)反電勢(shì)的位置檢測(cè)方法計(jì)算方法簡(jiǎn)單,但其不足是低速運(yùn)行或零速時(shí)電機(jī)反電勢(shì)較小或?yàn)榱悖瑥亩焕谖恢脵z測(cè)或根本無(wú)法進(jìn)行電機(jī)初始位置的檢測(cè)[8]。高頻信號(hào)注入法解決了反電勢(shì)法低速運(yùn)行或零速時(shí)的位置檢測(cè)問(wèn)題,其高頻電流響應(yīng)信號(hào)中含有轉(zhuǎn)子的位置信息,但其對(duì)高頻電流響應(yīng)信號(hào)的解調(diào)算法很復(fù)雜,運(yùn)算量大,理論性強(qiáng),實(shí)際應(yīng)用往往問(wèn)題較多[6,7,9-13]。脈沖信號(hào)注入法檢測(cè)轉(zhuǎn)子初始位置方法簡(jiǎn)單,但檢測(cè)時(shí)間較長(zhǎng),且轉(zhuǎn)子也易受注入脈沖影響而轉(zhuǎn)動(dòng)[14,15]。
針對(duì)以上問(wèn)題,本文提出一種基于旋轉(zhuǎn)高頻信號(hào)注入法的永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法。通過(guò)對(duì)三相高頻電壓信號(hào)的電流響應(yīng)進(jìn)行低通濾波,得到三相電流響應(yīng)信號(hào)幅值大小關(guān)系,再根據(jù)三相電流響應(yīng)幅值大小隨轉(zhuǎn)子位置角不同而變化的規(guī)律得出轉(zhuǎn)子初始位置信息,最后利用電機(jī)磁路飽和效應(yīng)區(qū)分電機(jī)轉(zhuǎn)子NS極性。理論分析及實(shí)驗(yàn)表明,該方法能準(zhǔn)確檢測(cè)出電機(jī)轉(zhuǎn)子初始位置信息,因注入高頻電壓信號(hào)頻率高、幅值低,檢測(cè)過(guò)程中電機(jī)轉(zhuǎn)子不會(huì)發(fā)生“抖動(dòng)”現(xiàn)象,電機(jī)起動(dòng)過(guò)程不會(huì)出現(xiàn)反轉(zhuǎn)現(xiàn)象,該方法能滿足永磁同步電機(jī)平穩(wěn)起動(dòng)的要求。
1 轉(zhuǎn)子初始位置檢測(cè)原理
永磁同步電機(jī)在靜止ABC坐標(biāo)系中定子電壓和磁鏈方程分別為
(1)
(2)
(3)
式中,ψA、ψB、ψC分別為A、B、C相繞組的全磁鏈;D代表對(duì)時(shí)間t的微分;ψfA、ψfB、ψfC分別為永磁勵(lì)磁磁鏈過(guò)A、B、C三相繞組產(chǎn)生的磁鏈;ψf為永磁體勵(lì)磁磁鏈;θ為d軸和靜止三相坐標(biāo)系A(chǔ)軸的夾角。定子繞組自感、互感分別為
(4)
(5)
式中,LS0為自感系數(shù)平均值;LS2為自感系數(shù)二次諧波幅值,即LS=LS0+LS2cos(2θ),且有
(6)
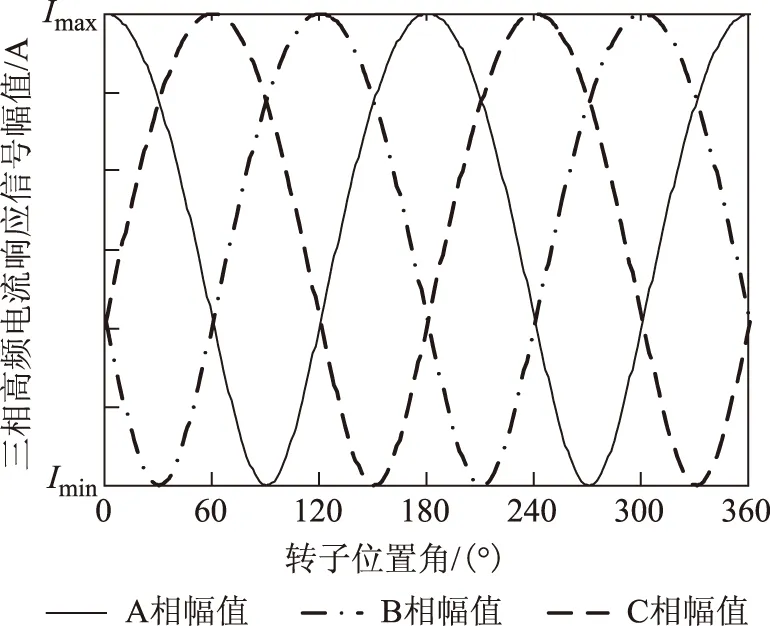
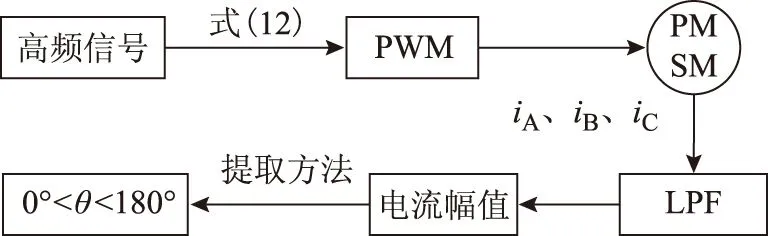
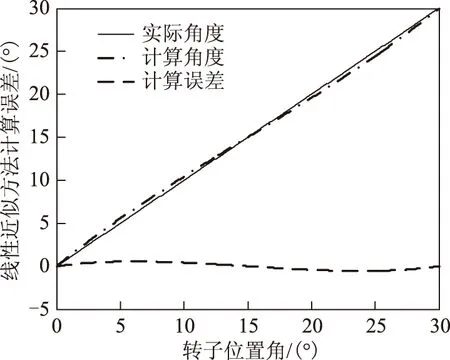
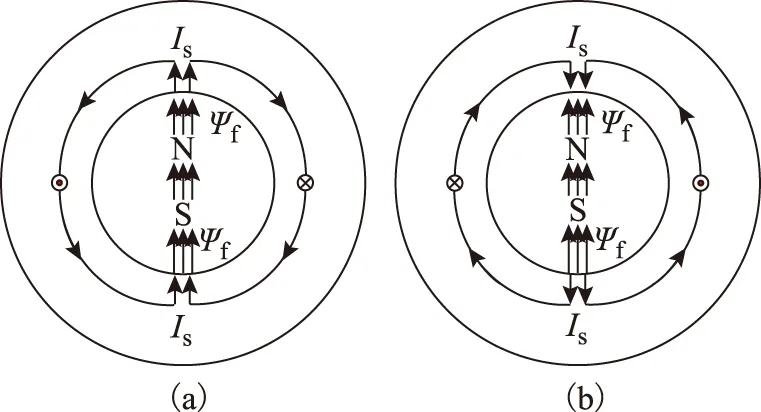
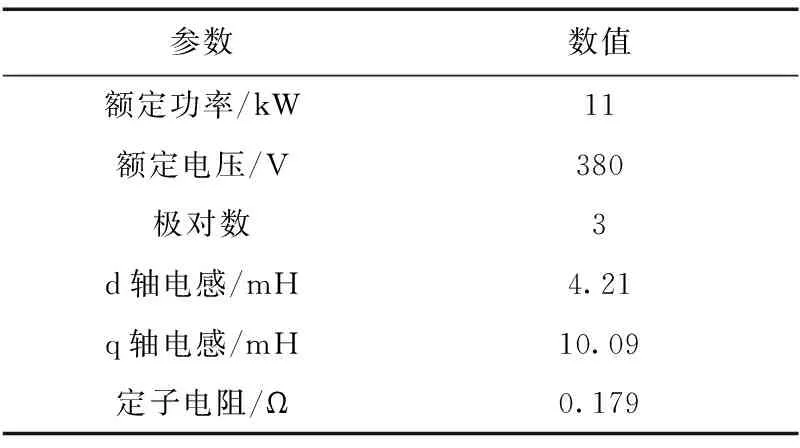
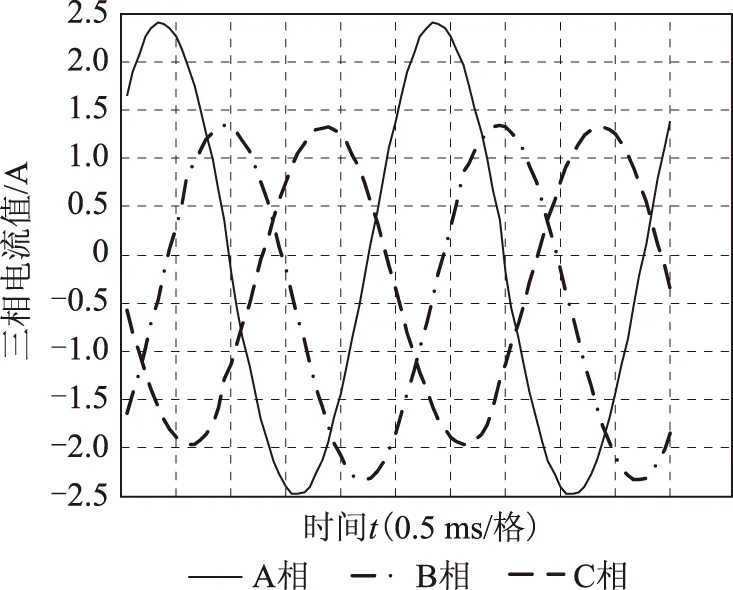
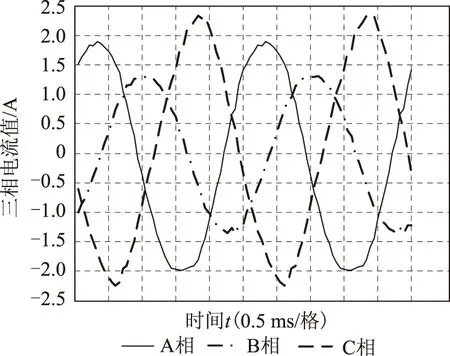
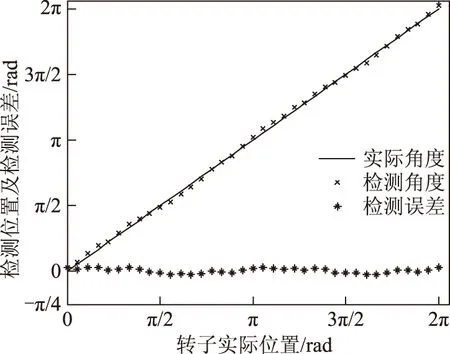
式中,LSd、LSq分別是同步電機(jī)直軸、交軸瞬態(tài)電感,對(duì)于凸極同步電機(jī)LSd (7) 將式(3)~式(5)帶入式(1)和式(2)中,再通過(guò)3/2坐標(biāo)變換可得永磁同步電機(jī)在靜止α-β坐標(biāo)系中定子電壓和磁鏈方程分別為 (8) (9) 式中,ω為轉(zhuǎn)子角速度,ω=dθ/dt, 由于進(jìn)行初始位置檢測(cè)時(shí)電機(jī)靜止,令ω=0,由于電機(jī)繞組中通入的是高頻電壓信號(hào),故可忽略定子電阻壓降,將式(9)帶入式(8)得定子電壓方程 (10) 檢測(cè)轉(zhuǎn)子初始位置需要通過(guò)檢測(cè)定子高頻電流響應(yīng)信號(hào)來(lái)實(shí)現(xiàn),通過(guò)式(10)求得電流響應(yīng)信號(hào)為 (11) 對(duì)定子繞組注入持續(xù)的高頻旋轉(zhuǎn)電壓信號(hào),在三相靜止坐標(biāo)系中的電壓表達(dá)式為 (12) 式中,U為注入高頻電壓信號(hào)的幅值;ωh為注入高頻電壓信號(hào)的角頻率。通過(guò)3/2變換到兩相靜止α-β坐標(biāo)系中 (13) 將式(13)帶入式(11)中,經(jīng)計(jì)算可得高頻電流響應(yīng)信號(hào)在兩相靜止α-β坐標(biāo)系中的表達(dá)式為 (14) (15) 可看出A、B、C三相高頻電流響應(yīng)信號(hào)均是兩個(gè)同頻率正弦信號(hào)的差,由電工基礎(chǔ)知識(shí)可知兩個(gè)同頻率正弦交流電壓之和(差)仍是正弦交流電壓,其幅值由兩信號(hào)各自幅值和兩信號(hào)的相位差決定。由式(15)和式(7)可知,在電機(jī)參數(shù)和高頻注入信號(hào)確定后,θ對(duì)三相高頻電流響應(yīng)信號(hào)的幅值有調(diào)制作用,也就是說(shuō)θ的不同將導(dǎo)致三相高頻電流響應(yīng)信號(hào)幅值的變化,其調(diào)制作用如圖1所示,表示θ由0°~360°變化時(shí)A、B、C三相電流幅值的變化規(guī)律。圖中幅值大小變化范圍(A、B、C三相相同)為 (16) (17) 將圖1中三相高頻電流響應(yīng)信號(hào)的幅值隨θ角的變化規(guī)律近似為正弦規(guī)律。ΔI由電機(jī)凸極性決定,電機(jī)凸極性越強(qiáng)(LSq-LSd)越大,因而三相高頻電流響應(yīng)信號(hào)幅值變化的幅度ΔI也越大。在后面的分析中可看出,此ΔI值越大越有利于轉(zhuǎn)子位置角θ的提取。從這種規(guī)律中提取出θ角信息的過(guò)程如圖2所示,其中LPF為低通濾波器,提取方法在后文中會(huì)進(jìn)行詳細(xì)介紹。 圖1 θ對(duì)三相高頻電流響應(yīng)幅值的調(diào)制作用Fig.1 Modulation of θ on three-phase high frequency current amplitude response 圖2 θ角提取過(guò)程Fig.2 The extraction process of θ 根據(jù)圖1直接采用查表法提取位置信息會(huì)受到注入高頻電壓信號(hào)的幅值U和角頻率ωh影響,根據(jù)圖1中三相電流幅值大小的比例關(guān)系提取位置信息則不會(huì)受到影響。從圖1可看出三相高頻電流響應(yīng)幅值大小隨轉(zhuǎn)子位置不同而變化的規(guī)律如式(18)所示。 (18) 式中,IA、IB、IC分別為A、B、C三相電流幅值大小,180°<θ<360°的情況與0°<θ<180°的情況相同。通過(guò)對(duì)三相電流幅值大小進(jìn)行比較可將θ確定在180°之前的某一個(gè)30°范圍內(nèi)(先不對(duì)NS極性進(jìn)行區(qū)分,認(rèn)為0°<θ<180°),根據(jù)式(19)的線性近似方法計(jì)算θ值。 (19) 圖3 線性近似方法計(jì)算誤差Fig.3 Calculation error of linear approximation 可計(jì)算出此誤差不超過(guò)0.56°(電角度),說(shuō)明這種數(shù)學(xué)線性近似方法本身不會(huì)帶來(lái)大的計(jì)算誤差,這個(gè)由計(jì)算帶來(lái)的誤差,對(duì)永磁同步電機(jī)的起動(dòng)控制,其影響可忽略。 由式(15)可知,盡管各相電流大小及幅值會(huì)受到k值的影響,但在式(19)所示的轉(zhuǎn)子位置角θ的提取方法中,k值對(duì)各相電流大小及幅值的影響相互抵消,因而,圖2所示提取轉(zhuǎn)子位置角θ的過(guò)程以及式(18)和式(19)所示的提取方法,不受注入高頻電壓信號(hào)的幅值U和角頻率ωh影響,對(duì)電機(jī)參數(shù)不敏感,魯棒性強(qiáng)。 上節(jié)所述提取轉(zhuǎn)子位置角θ的方法,并不能對(duì)轉(zhuǎn)子NS極性進(jìn)行區(qū)分,也就是說(shuō)θ可能對(duì)應(yīng)著N極,也可能對(duì)應(yīng)著S極,而轉(zhuǎn)子NS極性的區(qū)分要用到磁路飽和效應(yīng)。為了充分利用材料,電機(jī)再設(shè)計(jì)時(shí)往往要讓磁路處于微飽和狀態(tài)。因此,對(duì)電機(jī)轉(zhuǎn)子d軸正方向(即N極)施加電壓,會(huì)使電機(jī)d軸磁路過(guò)飽和,如圖4a所示;對(duì)電機(jī)轉(zhuǎn)子d軸負(fù)方向(即S極)施加電壓,會(huì)使電機(jī)d軸磁路退飽和,如圖4b所示。而電機(jī)直軸電感LSd會(huì)隨d軸磁路的過(guò)飽和而減小,隨d軸磁路的退飽和而增大。 圖4 定子磁勢(shì)對(duì)d軸磁路影響Fig.4 Influence of stator magnetomotive force to d-axis flux 由式(14)和式(6)可得電機(jī)d軸電流表達(dá)式為 (20) 為了驗(yàn)證所提供的永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法的正確性,以一臺(tái)額定功率為11 kW,額定電壓為380 V的內(nèi)嵌式永磁同步電機(jī)為研究對(duì)象,進(jìn)行了大量實(shí)驗(yàn)。電機(jī)參數(shù)如表1所示。控制系統(tǒng)以TMS320F2812為核心,主電路采用三相電壓源逆變器,向電機(jī)注入的高頻電壓信號(hào)幅值大小為80 V,頻率為400 Hz。 表1 永磁同步電機(jī)主要參數(shù)Tab.1 Main parameters of PMSM 圖5 θ=0°時(shí)的三相高頻電流響應(yīng)波形Fig.5 Three-phase high frequency current amplitude response θ=0° 圖6 θ=40°時(shí)的三相高頻電流響應(yīng)波形Fig.6 Three-phase high frequency current amplitude response θ=40° 圖7 轉(zhuǎn)子位置檢測(cè)誤差Fig.7 Detection error of rotor position 產(chǎn)生誤差的主要原因有電流采樣誤差、系統(tǒng)外部干擾、數(shù)學(xué)近似模型帶來(lái)的誤差以及電機(jī)結(jié)構(gòu)不對(duì)稱和轉(zhuǎn)子不同位置飽和度不同帶來(lái)的電流響應(yīng)誤差等。對(duì)于各種導(dǎo)致電流檢測(cè)不準(zhǔn)的因素,可采用對(duì)三相高頻電流響應(yīng)信號(hào)進(jìn)行低通濾波,濾除雜波信號(hào)后再提取電流響應(yīng)幅值大小的方法。在工程實(shí)踐中,也可增加注入的高頻信號(hào)的周期數(shù),從而得到多個(gè)周期電流響應(yīng)信號(hào)的幅值,采用平均值法計(jì)算電流幅值,從而最大化地減少電流檢測(cè)不準(zhǔn)對(duì)線性近似方法的影響。 [1] 劉家曦,李立毅,杜鵬程.考慮磁場(chǎng)交叉耦合的內(nèi)嵌式永磁同步電機(jī)初始位置檢測(cè)技術(shù)[J].電工技術(shù)學(xué)報(bào),2013,28(7):32-38.LiuJiaxi,LiLiyi,DuPengcheng.Initialrotorpositionestimationconsideringmagneticcross-couplingbasedonIPMSM[J].TransactionsofChinaElectrotechnicalSociety,2013,28(7):32-38. [2] 周元鈞,蔡名飛.改進(jìn)的永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法[J].電機(jī)與控制學(xué)報(bào),2010,14(3):68-72.ZhouYuanjun,CaiMingfei.InitialrotorpositioninspectionofPMSMbasedonrotatinghighfrequencyvoltagesignalinjection[J].ElectricMachinesandControl,2010,14(3):68-72. [3] 金光哲,徐殿國(guó),高強(qiáng),等.高頻注入電壓預(yù)估同步電機(jī)轉(zhuǎn)子位置檢測(cè)方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2014,34(09):1376-1383.JinGuangzhe,XuDianguo,GaoQiang,etal.Asynchronousmotorrotorpositiondetectionmethodbasedonhigh-frequencyinjectionvoltageprediction[J].ProceedingsoftheCSEE,2014,34(09):1376-1383. [4] 張濤.基于高頻信號(hào)注入的IPMSM轉(zhuǎn)子初始位置估計(jì)[J].硅谷,2009(11):37-38.ZhangTao.InitialrotorpositionestimationbasedonhighfrequencysignalinjectionforIPMSM[J].SiliconValley,2009(11):37-38. [5] 楊立永,陳為奇.永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)研究[J].電氣傳動(dòng),2012,42(3):57-61.YangLiyong,ChenWeiqi.StudyoninitialpositionofPMSMrotor[J].ElectricDrive,2012,42(3):57-61. [6] 唐芬,金新民,周?chē)[,等.一種低成本直驅(qū)永磁風(fēng)力發(fā)電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法[J].電氣應(yīng)用,2012,31(16):100-104.TangFen,JinXinmin,ZhouXiao,etal.Alowcostmethodfordirect-drivepermanentmagnetwindturbinerotorinitialpositiondetection[J].ElectrotechnicalApplication,2012,31(16):100-104. [7] 于艷君,柴鳳,歐景,等.基于旋轉(zhuǎn)高頻信號(hào)法的IPMSM無(wú)位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2013,28(7):26-31.YuYanjun,ChaiFeng,OuJing,etal.PositionsensorlesscontrolofIPMSMbasedonrotatinghighfrequencysignalmethod[J].TransactionsofChinaElectrotechnicalSociety,2013,28(7):26-31. [8] 李志強(qiáng),夏長(zhǎng)亮,陳煒.基于線反電動(dòng)勢(shì)的無(wú)刷直流電機(jī)無(wú)位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2010,25(7):38-44.LiZhiqiang,XiaChangliang,ChenWei.ApositionsensorlesscontrolstrategyforBLDCMbasedonlineBack-EMF[J].TransactionsofChinaElectrotechnicalSociety,2010,25(7):38-44. [9] 劉穎,周波,馮瑛,等.永磁同步電機(jī)低速無(wú)傳感器控制及位置估計(jì)誤差補(bǔ)償[J].電工技術(shù)學(xué)報(bào),2012,27(11):38-45.LiuYing,ZhouBo,F(xiàn)engYing,etal.AnovelsensorlesscontrolmethodofSPMSMatlowspeedandestimatedrotorpositionerrorcompensation[J].TransactionsofChinaElectrotechnicalSociety,2012,27(11):38-45. [10]楊興華,姜建國(guó).永磁同步電機(jī)精確瞬時(shí)速度檢測(cè)[J].電工技術(shù)學(xué)報(bào),2011,26(4):71-76.YangXinghua,JiangJianguo.Preciseinstantaneousspeeddetectionforpermanentmagnetsynchronousmotors[J].TransactionsofChinaElectrotechnicalSociety,2011,26(4):71-76. [11]HuangZhaobin,YouLinru,WangZhaodong.MotionsimulationandanalysisduringinitialrotorpositionidentificationforPMSMbasedonhighfrequencyvoltageinjection[C].26thChineseControlandDecisionConference,Changsha,2014:1929-1935. [12]王高林,楊榮峰,李剛,等.基于高頻信號(hào)注入的IPMSM無(wú)位置傳感器控制策略[J].電工技術(shù)學(xué)報(bào),2012,27(11):62-68.WangGaolin,YangRongfeng,LiGang,etal.PositionsensorlesscontrolstrategyofIPMSMbasedonhighfrequencysignalinjection[J].TransactionsofChinaElectrotechnicalSociety,2012,27(11):62-68. [13]何棟煒,彭俠夫,蔣學(xué)程,等.內(nèi)置式永磁同步電機(jī)轉(zhuǎn)子初始位置估計(jì)方法[J].電機(jī)與控制學(xué)報(bào),2013,17(3):49-55.HeDongwei,PengXiafu,JiangXuecheng,etal.InitialrotorpositionestimationmethodforIPMSM[J].ElectricMachinesandControl,2013,17(3):49-55. [14]陳東升,張淼,張矛盾.基于互感電壓的無(wú)位置傳感器SRM初始位置檢測(cè)[J].電氣傳動(dòng),2010,40(6):75-77.ChenDongsheng,ZhangMiao,ZhangMaodun.InitialpositiondetectionofsensorlessSRMbaseonmutual—inductancevoltage[J].ElectricDrive,2010,40(6):75-77. [15]林瑤瑤,仲崇權(quán).無(wú)傳感器永磁同步電機(jī)初始位置檢測(cè)研究[J].電力電子技術(shù),2013,47(10):102-104.LinYaoyao,ZhongChongquan.StudyofinspectionofthesensorlessinitiairotorpositionofPMSM[J].PowerElectronics,2013,47(10):102-104. Estimation of the Initial Rotor Position for Permanent MagnetSynchronous Motors LuJiadongLiuJinglinWeiLichao (School of Automation Northwestern Polytechnical University Xi’an 710129 China) An estimation method for the initial rotor position for permanent magnet (PM) synchronous motor based on the high frequency voltage injection is presented on account of the problems in existing methods,which includes that the rotor may jitter,the methods depend highly on the motor parameters,and the mathematical processing algorithm of the high-frequency current responses during the estimation is complex.In the proposed method,the three phase high frequency voltage signals are laid on the motor first.By comparing the amplitudes of the three-phase high frequency current responses through LPF (low-pass filter),the method obtains the initial rotor position following the rules that the rotor position affects the amplitudes of the three-phase high frequency current responses.Then the motor magnetic saturation effect is used to distinguish the NS poles.The algorithms and the experimental results show that the proposed estimation method for the initial rotor position is correct.And during the estimation,the rotor does not jitter.The method does not need any additional circuits.The mathematical processing algorithm for the high-frequency current response is easy.And the estimation error is small.This estimation method can be used in motor’s smooth start. Permanent magnet synchronous motor,initial rotor position,high frequency signal injection,magnetic saturation effect 陜西省科技統(tǒng)籌創(chuàng)新工程計(jì)劃(2013KTCQ01-20),航空基金(2013ZC53045)和中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金(3102014JCY01006)資助項(xiàng)目。 2014-11-20 改稿日期2015-01-25 TM315 魯家棟 男,1990年生,博士研究生,研究方向?yàn)檫\(yùn)動(dòng)控制及伺服控制技術(shù)。(通信作者) 劉景林 男,1964年生,教授,博士生導(dǎo)師,研究方向?yàn)楹娇蘸教煳⑻仉姍C(jī)及驅(qū)動(dòng)系統(tǒng)、電機(jī)智能控制及測(cè)試技術(shù)等。
2 轉(zhuǎn)子NS極性判斷
3 實(shí)驗(yàn)與結(jié)果分析


4 結(jié)論
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25