一種小角度誤差快速檢測方法及不確定度分析
2015-04-13 09:31:38孫斌李云玲卜雄洙
計測技術 2015年6期
孫斌,李云玲,卜雄洙
(1.南京理工大學機械工程學院,江蘇南京210094;2.內蒙古北方重工業集團有限公司,內蒙古包頭014033)
0 引言
轉臺常常作為高精度的角度位置產生的基礎平臺。轉臺的位置輸出精度直接影響整個測試系統的校準或測量精度,因此需要經常對轉臺的角度系統進行誤差測量,為調校轉臺設備提供依據。傳統的機械測角法有多面體棱鏡法、分度臺法等;近些年來又研究出較多的光學測角法,如圓光柵法、衍射法、以及激光干涉法等[2]。機械方法自動化程度低、操作繁復且多只能用于靜態測量。光學法雖然操作簡便、自動化程度高,但實驗設備復雜、昂貴,設備通用性差,對環境要求嚴苛[3]。在存在振動等干擾的環境中,無論是傳統的機械測角法還是高精度的光學測角法都很難實施,即使條件允許,測量過程往往過于繁復。因此,研究具有較強環境適應性的快速測量方法很有必要。自準直經緯儀是最常用的光學測角儀器之一,具有自動補償機構,能很好地適應不同的應用環境,常用于大地觀測、微小角度測量等領域。本文以單軸俯仰轉臺為例,針對傳統角度誤差檢測設備難以對轉臺角度誤差進行快速測量的問題,提出一種適合于現場快速應用的自準直經緯儀對準靜態誤差測量方法,并建立其誤差測量模型,推導模型解算的方法,最后對其測量不確定度進行評定。
1 測量原理及系統組成
1.1 測量原理
利用自準直經緯儀測量轉臺角度誤差的原理如圖1所示,反射面做以轉臺水平軸中心O 為旋轉中心的同軸轉動。測量時,先轉動轉臺水平軸至預設角度誤差測量位置θ,反射面跟隨其同步轉動,調整自準直經緯儀,使其發出的光線經反射面垂直反射后成自準直像,即返回的十字像落在固定分劃線的雙十字刻線中心,然后讀取經緯儀上垂直角φ,根據光路可知,θ=φ-90°,結合轉臺自身角度輸出θ’,就可以得到該位置下轉臺的角度誤差,記錄結果并開始下一次測量,按照此步驟依次完成各個預設角度位置的誤差測量。

圖1 角度誤差測量原理圖
1.2 系統組成
采用自準直經緯儀對準法進行靜態誤差測量的裝置如圖2所示,該套測量裝置主要由自準直經緯儀、反射棱鏡和上位機等組成。自準直經緯儀因其測量精度高、操作簡單及可靠性好等特點在高精度安裝和方向基準建立中得到廣泛應用。一般電子經緯儀的測角精度能達到秒級[4],對于一般轉臺的角度誤差測量而言已足夠。反射棱鏡是由圓柱體棱鏡在其側面加工出一個鍍膜反射面,如圖2 中面A所示,鍍膜的目的是提高反射率。安裝時,首先用分度值為0.0002 mm 的測微表來找正,調整定位夾具的芯軸與被測轉軸中心重合。在此基礎上,在轉臺處于水平時,用高精度光電準直儀水平將反射面的中心法線調整至水平,即反射面處于鉛垂,至此反射棱鏡安裝完畢,之后的測量過程中無需再調整。上位機主要完成測量控制、數據采集處理及結果顯示的工作,數據包括轉臺自身的轉動角度輸出以及自準直經緯儀的角度輸出。該套設備構成簡單,實用性強。針對不同的轉軸,只要加工相應的工裝使得反射棱鏡能夠同軸安裝即可,通用性明顯優于其他一些光學方法。
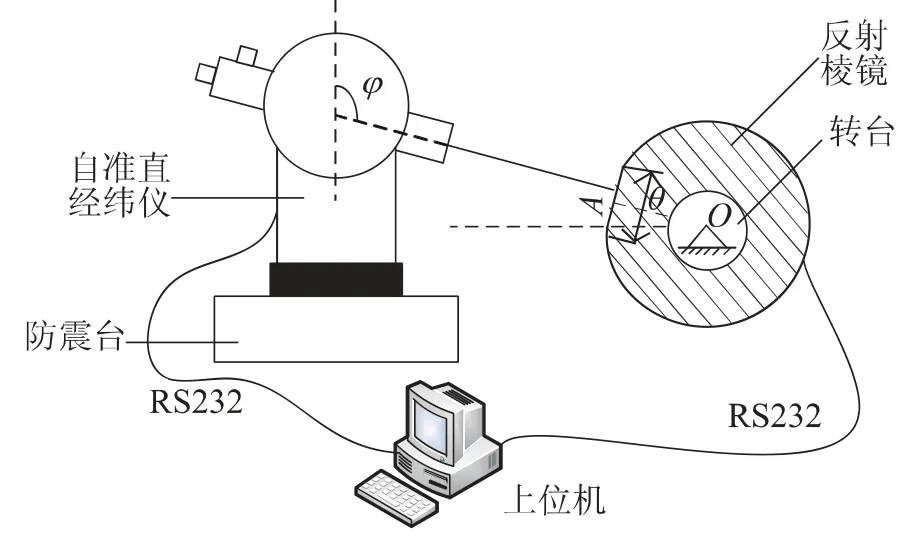
圖2 自準直經緯儀測量轉臺誤差裝置示意圖
2 空間反射模型及解算方法
2.1 空間反射模型
轉臺轉角誤差測量的反射模型如圖3所示。為了更準確地描述測量過程,選取參考坐標系OXYZ,矢量A,A'和N 分別為反射平面的入射光矢、反射光矢和反射面法線的單位矢量。圖3 中,φ 角為反射平面的入射光線A 與Z 軸的夾角,即自準直經緯儀的垂直角輸出;α 角是入射光線A 在XY 平面投影Axy與Y 軸的偏移角;θ 是反射棱鏡反射面中心法線N 與水平線的夾角,測量過程中以轉臺自身的角度輸出近似表示;β角是反射面法線N 在XZ 平面投影Nxz與Z 軸的偏移角。理想情況,φ,θ 處于YZ 平面且滿足θ=φ-90°,此時有α=β=0°,問題簡化為二維模型。但是實際測量時,由于安裝誤差、儀器誤差、人員誤差等的存在,α,β 均不為0 且兩者間不存在明顯的數學關系,此時φ,θ 不再滿足θ=φ-90°的關系。所以絕大多數情況下,簡化的二維模型不能反映實際測量中存在的許多誤差來源,即二維模型只能用于定性說明測量原理,無法用于實際測量。
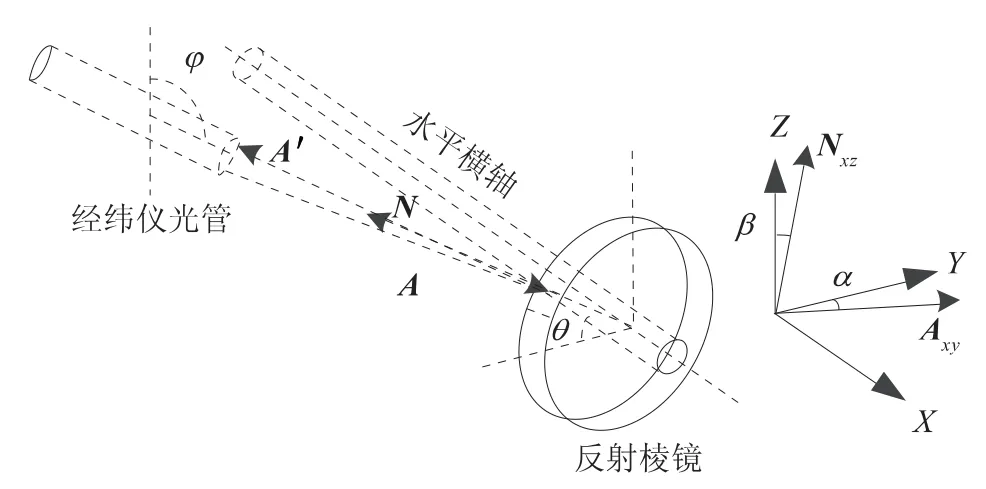
圖3 空間反射測量示意圖
為了解決上述問題,需要研究建立三維空間反射測量模型。結合光線的矢量性,采用矢量分析方法[5]建立的模型關系式為

2.2 模型解算
在圖3所示坐標系下可得

測量時,調整自準直經緯儀使其成自準直像,即光線是原路返回,則

結合式(1),(3)可得

將式(2)代入式(4)并化簡可得

式(5)說明此時φ,θ 為非線性關系,且與偏移角α,β 大小有關,α,β 的地位對等。圖4 是角α,β 存在下θ 與理論真值的誤差。

圖4 偏移角α,β 對測量結果的誤差
從圖4 可知,當cosα,cosβ 的值都接近1,即α,β接近0 時,偏差很小,這時可以進一步化簡式(5)可得

從式(6)得到了與二維平面分析一致的表達式。所以,當測量裝置安裝調校比較好的情況下,如果要求的測量精度不是很高,可以采用式(6)作為測量的反射模型。否則,采用式(5)更為合適,但是需要額外的增加對偏移角α,β 的測量,增加了實驗操作難度。
3 不確定度評定
3.1 數學模型
實驗被測對象為一臺A1-ST14A-JX-00 單軸電動俯仰轉臺,其位置誤差指標在15″以內,自準直經緯儀采用的是DT202C 電子經緯儀,垂直角測角誤差為2″,滿足測量不確定度之比在1/4 ~1/10 的條件[6],所以選擇式(6)作為角度誤差測量的反射模型。在該條件下,角度誤差可以表示為

式(7)中φ 與θ'相互獨立,故由不確定度傳播律得合成標準不確定度的平方為

式中:cφ,cθ’為靈敏系數,。
3.2 不確定度分量評定
3.2.1 自準直經緯儀讀數φ 相關誤差引入的不確定度
1)測量重復性引入的不確定度
實驗預設測量位置為-10° ~+20°,間隔2°,一共16 個測量點。設備安裝調節完后,通過各6 次盤左、盤右對預設角度位置進行重復測量,單次測量的標準不確定度s(x)=2.06″。故測量重復性引入的標準不確定度為

自由度ν1=n-1=5。
2)自準直經緯儀引入不確定度
自準直經緯儀引入誤差包含儀器誤差和對準誤差兩部分。儀器誤差通過查產品合格證書:U=1″,k=2,可得不確定度分量
u2=1/2=0.5″
相對不確定度為90%,則自由度ν2=50。
對準誤差主要是由人眼的分辨力限制造成的。實驗所用自準直經緯儀望遠鏡放大率為30,對準方式為壓線對準和夾線對準相結合,其人眼分辨誤差約為δ=15″[7],所以其對準誤差的不確定度分量為
u3=15″/30=0.5″
相對不確定度為80%,自由度ν3=12。
3)反射棱鏡引入不確定度
反射棱鏡引入誤差包括反射棱鏡反射面的面形誤差及其安裝誤差。反射平面并不是絕對的平面,因此其法線方向會有微小的變化。實驗所用反射棱鏡的鍍膜反射面面形誤差為高光圈N=1,所以由其造成的角度測量不確定度分量[8]為

式中:λ 為光波波長,取λ=5×10-4mm;l 為反射面的長度,l=100 mm。將弧度轉為角秒得

相對不確定度為80%,自由度ν4=12。
反射棱鏡采用光電自準直法[9]安裝至轉臺軸上,轉臺的零位調校也是用光電自準直儀法。所采用的準直光管誤差為±1″,反射面法線與轉臺零位線之間的安裝誤差最大值為2″,其分布按均勻分布[10],則由安裝誤差引入的不確定度為

相對不確定度為75%,則自由度為ν5=8。
以上引入各不確定度分量的因素互不相關,所以由這些分量得到與φ 相關的標準不確定度分量為

3.2.2 轉臺測角系統輸出角度θ'誤差引入的不確定度
采用多面體棱鏡法測量得到轉臺自身輸出角度存在誤差[11],由其引入的不確定度為

式中:σmax和σmin分別為用多面體棱鏡法測得的最大和最小偏差。實驗所用多面體棱鏡為二十三面體[12],自由度為ν6=m-1=22。
3.2.3 合成標準不確定度及擴展不確定度
將uφ,uθ'的值代入公式(8),可得系統的合成標準不確定度為

有效自由度[13]為

取置信概率為95%,查t 分布表得t95(32)=2.04,則擴展不確定度為

4 結論
本文介紹了一種利用自準直經緯儀快速測量轉臺轉角誤差的方法——自準直經緯儀對準法,通過深入分析該方法所采用的空間反射模型,給出了精確表達式,為以后進一步提高該方法精度提供了理論依據。對測量裝置的不確定度評定結果表明,擴展不確定度在10″以內,能夠滿足轉臺小角度范圍測量誤差的精度要求。該方法與傳統方法相比具有操作簡便、成本低、抗環境干擾強的優點,具有工程應用價值。
[1]曾鳴,王錦賀,張健,等.轉臺測角系統標定方法的研究[J].中國慣性技術學報,1998,6(4):84-88.
[2]黃仙錦,卜雄洙,楊波,等.自準直經緯儀測角系統及不確定度分析[J].計量技術,2013(8):13-16.
[3]孫安斌,馬驪群,曹鐵澤,等.室內GPS 發射器角度校準裝置的設計與分析[J].計測技術,2013,33(6):35-39.
[4]劉凱.新型光電自準直經緯儀關鍵技術研究[D].北京:北京交通大學,2012.
[5]樊春麗,崔瑩.六面體轉鼓分度和塔差的檢測方法及測量結果不確定度的評定[J].紅外與激光工程,2008,37(增刊):337-339.
[6]韓素超,高雪,李紅菊,等.專用分度頭校準方法探討[J].計測技術,2015,35(S0):32-33.
[7]楊雙燕.光束的矢量性表征及其應用[D].上海:上海大學,2014.
[8]馬峰,周駿.角度塊角度偏差測量值的不確定度評定[J].計量與測試技術,2015(1):44-45.
[9]何海霞.基于光電自準直的二維小角度測量技術研究[D].武漢:湖北工業大學,2009.
[10]國家質量監督檢驗檢疫總局.JJF 1210-2008 低轉速轉臺校準規范[S].北京:中國計量出版社,2008.
[11]Liang W Y,Dong J W,Wang H Z.Directional emitter and beam splitter based on self-collimation effect[J].OPTICS EXPRESS,2007,15(3):1234-1239.
[12]Cheng Fang,Fan Kuangchao.Linear diffraction grating interferometer with high alignment toleranceand high accuracy[J].APPLIED OPTICS,2011,50(22):4551-4556.
[13]Zhao Lirong,Zhu Wei,Zhang Yaoyu,et a1.The Method of the System Error Modification of Photoelectric Theodolite of T Type[C]//2012 International Conference on Optoelectronies and Mieroeleetronics.Changchun.Jilin:IEEE,2012:384-387.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
