改進隨機森林及其在人體姿態識別中的應用
2015-04-17 02:45:22周博翔
計算機工程與應用 2015年16期
周博翔,李 平,李 蓮
ZHOU Boxiang,LI Ping,LI Lian
長沙理工大學 計算機與通信工程學院,長沙410114
Institute of Computer and Communication Engineering, Changsha University of Science and Technology, Changsha 410114,China
1 引言
目前,研究人體姿態識別的方法有很多種,主要的兩種識別方法是:基于圖像分析的人體姿態識別和基于運動傳感器的人體姿態識別。基于圖像分析的識別方法能清晰看見人體運動姿態,準確性高,但對設備要求較高,應用場景特殊且不便攜帶。另一種方法是使用便攜采集器獲取人體運動時的加速度信號并加以識別。隨著MEMS 技術和無線傳感器網絡技術的快速發展,運動傳感器逐漸微型化、智能化,并與無線模塊相結合,在人體姿態識別、跌倒檢測、運動檢測等方面得到廣泛應用。
基于加速度傳感器的人體姿態識別主要有兩個步驟:特征提取和分類算法。提取的特征矢量的好壞影響著后續分類算法的性能。目前,特征提取主要從時域和頻域兩個方面進行分析。文獻[1]統計了2004—2010 年間常用的時域和頻域特征,統計結果表明:均值使用頻率最高,方差次之。其中,時域特征有:均值[2-4]、信號幅值面積[5]、均方根[4]、兩軸之間的相關系數[2-4]等;頻域特征有:FFT 系數[4]、頻域熵[2-4]等,文獻[6]通過實驗對比了多種特征對分類性能的影響,驗證了FFT 系數具有最高的識別率。基于加速度傳感器的人體姿態識別所使用的分類算法主要有:C4.5 決策樹[2,7]、k近鄰[3,7]、支持向量機[2,7]、樸素貝葉斯[8]和AdaBoost[5,9]等。文獻[8]對比了C4.5 決策樹、k近鄰和樸素貝葉斯的分類效果,得出:C4.5 決策樹識別精度最高,但容易出現過擬合現象。文獻[10]中采用SVM 分類算法有效地識別了老年人的9種日常動作。文獻[9]采用AdaBoost 算法集成多種分類器,提高了行為識別性能。
雖然FFT 具有最高的識別率[6],但仍存在計算量較大的問題,而時域特征提取簡單、計算復雜度低,有效解決了上述問題。鑒于此,本文采用了三種常用的時域特征:均值、均方根、信號幅值面積。為了更好地反映出加速度的變化速率,提取了近斜率和前后差兩個新的時域特征矢量,并加入原始加速度值作為本文的特征矢量集。雖然AdaBoost 識別性能有所提高[5],但它在訓練過程中,分類器精確度隨分類錯誤的權重加大不斷下降。隨機森林的泛化錯誤隨數據個數增加而收斂,解決了決策樹過度擬合問題,且相比AdaBoost,隨機森林具有更優的分類性能,對錯誤和離群點更具魯棒性。但隨機森林仍存在靜態性和容易陷入局部最優等問題。因此,本文提出了一種蜜蜂交配優化隨機森林作為分類算法對人體姿態進行識別。通過實驗證明:本文提取的特征矢量的非常有效,該算法能有效識別六種人體行為,且具有較高的準確率、穩定性和魯棒性。
2 相關知識介紹
2.1 隨機森林
隨機森林是以K棵決策樹{h(X,θk),k=1,2,…,K}為基本分類器,通過集成學習后得到的一個組合分類器。輸入的待分類樣本的最終所屬類別由森林中的每棵決策樹投票決定[11]。這里的{h(θk,k=1,2,…,K}是一個相互獨立且同分布隨機變量,它是由隨機森林的兩大隨機化思想決定的:
(1)Bagging 思想:從原始數據集X中有放回地隨機抽取K個與其同樣大小的訓練樣本集{X1,X2,…,XK}(每次約有37%的樣本未被抽中),每個訓練樣本集Xi構造一個對應的決策樹。
(2)隨機屬性選擇思想:在對決策樹每個節點進行分裂時,從全部屬性中等概率隨機抽取一個屬性子集(取個屬性,F為屬性總數),再從這個子集中根據信息增益選擇一個最優屬性來分裂節點。
2.2 蜜蜂交配優化算法
蜜蜂交配優化算法是Abbass[12]于2001 年提出的模擬蜜蜂繁殖行為的蜂群算法。一個完整的蜂群由蜂王、雄蜂、工蜂、幼蜂組成。雄蜂負責與蜂王交配。工蜂負責照顧幼蜂、采蜜等工作。蜜蜂交配算法的步驟如下:
步驟1隨機初始化一個蜂群,蜂群中適應度值最大的個體為蜂王,其余的為雄蜂。
步驟2(婚飛)初始化蜂王的能量和速度,判斷受精囊是否滿或者蜂王的能量是否達到預先設定的臨界值,如果是,則轉入步驟3;否則隨機選擇一個雄蜂,根據式(1)計算它的交配概率pi,如果pi>r(隨機數r∈[0,1]),則交配成功,將它的染色體加入受精囊S中。按式(2)、式(3)更新蜂王的速度和能量。

其中Δ(f)為雄蜂與蜂王的適應度之差,s(t)、E(t)為t時刻蜂王的速度和能量;μ∈(0,1)為衰減系數,θ∈(0,1)(式(4))為每次交配后能量的減少量,sC為受精囊容量,E(0)為初始能量,e=0.5。
步驟3(繁殖過程)從受精囊中隨機選擇一個染色體與蜂王的染色體交叉,產生幼蜂。
步驟4(飼養過程)工蜂代表不同的啟發式算法,利用工蜂進一步提高幼蜂的性能。
步驟5如果適應度最大的幼蜂優于蜂王,則將其替代蜂王,否則蜂王不變,其余幼蜂為雄蜂。
步驟6判斷是否達到最大婚飛次數,如果達到,則停止,否則轉至步驟2。
3 蜜蜂交配優化隨機森林算法
3.1 算法思想
隨機森林算法因引入兩大隨機思想,避免了過度擬合問題,分類精度高于其基分離器,但同時使得算法穩定性不強。另一方面,由于隨機森林算法是靜態算法,分類模型一旦被訓練就不能調整,因此,算法易陷入局部最優解,而達不得到全局最優解。鑒于此,本文提出了一種蜜蜂交配優化隨機森林算法(Honey-Bee Mating Optimization Random Forest,HBMORF)。該算法引入蜜蜂交配智能優化算法來動態改變隨機森林中的決策樹,以增強隨機森林的多樣性,提高隨機森林的分類能力與穩定性。
為了防止算法對數據集過度擬合,本文將原始數據集X分成三等份:訓練集D、驗證集M、測試集T。訓練集D用于訓練決策樹形成隨機森林(蜜蜂),進而生成初始蜂群;驗證集M用于計算初始蜂群的適應度值,并且用于工蜂飼養幼蜂;測試集T用于計算蜜蜂交配過程中的適應度,以及測試每次迭代中蜂王(最優的隨機森林)的性能。每次迭代,幼蜂繼承了蜂王的優良基因,所以子代種群向最優解進化的可能性變大。另一方面,為了避免早熟,本文中采用變異算子代表工蜂,利用工蜂為每只幼蜂產生新解,以保持進化種群的多樣性,加強算法的全局尋優能力。因引入多個隨機森林,且每次迭代都會調整森林間的決策樹以及引入新的決策樹,新生的蜂王性能要優于或等于上代蜂王,所以經過mfN次迭代后將產生性能最優的蜂王,且算法的穩定性較強。本文算法具體的代進化過程如圖1 所示。
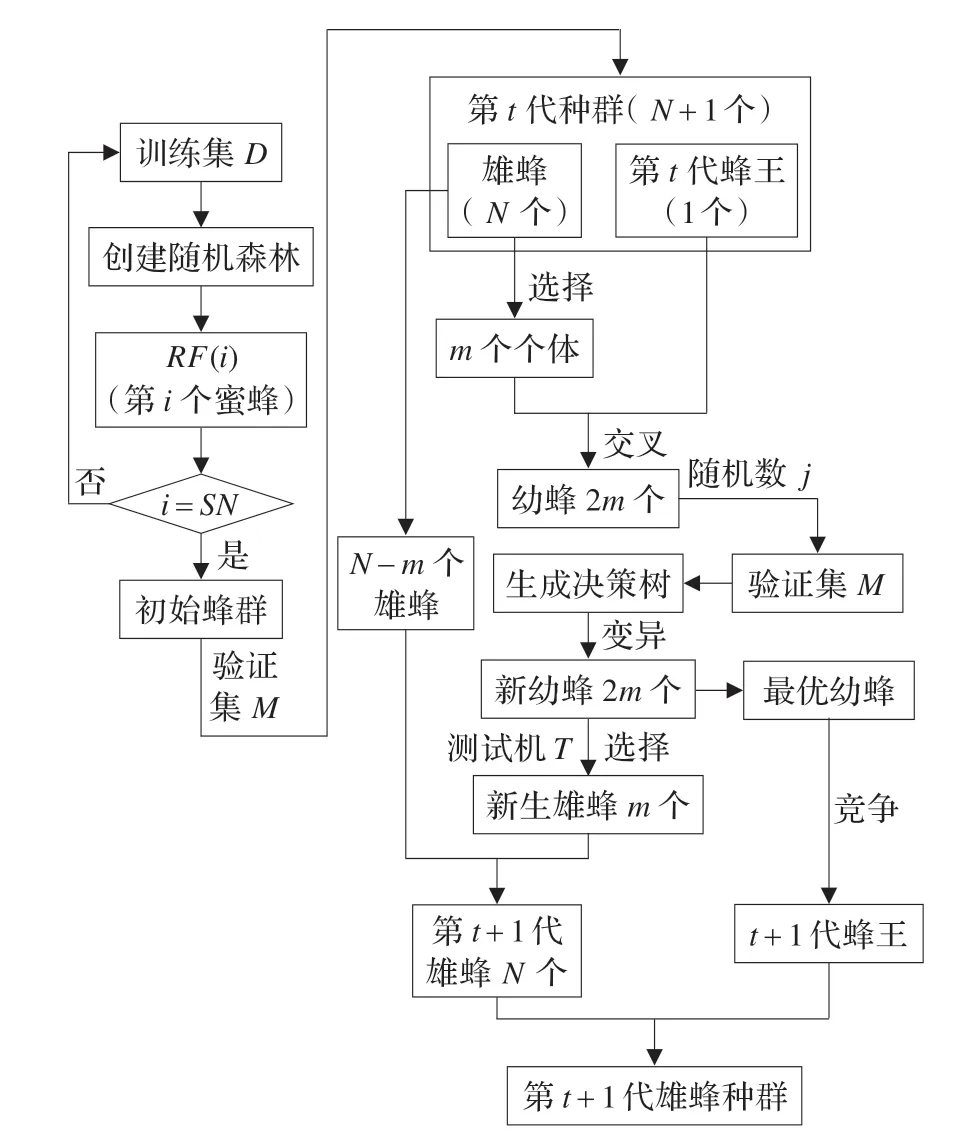
圖1 HBMORF 算法示意圖
3.2 適應度函數
每只蜜蜂zi的適應度值主要由其代表的隨機森林在驗證集(或測試集)上能正確分類的樣本數決定,如式(5)。

如果個體zi成功分類第j個樣本,則c(zi,j)=1,否則c(zi,j)=0;如果對第j個樣本,成功分類的決策樹個數等于錯誤分類的決策樹個數,則s(zi,j)=1,否則s(zi,j)=0;其中m為驗證集M中樣本數。
3.3 算法設計
(1)蜜蜂編碼
本文采用間接編碼方式,每一個染色體Zi代表一個隨機森林,組成染色體的每個基因zik代表一個指向決策樹根節點的指針。蜜蜂染色體編碼如下:
Zi=(zi1,zi2,…,zik)
(2)算法步驟
步驟1蜂王與雄蜂初始化
從訓練集D中有放回地隨機抽取K個與其同樣大小的訓練樣本集{D1,D2,…,DK},每個訓練樣本集Di構造一棵決策樹。以同樣的方式訓練得到K棵決策樹組合起來,就可以得到一個隨機森林即一個蜜蜂的染色體。反復執行SN次,生成SN個染色體{Z1,Z2,…,ZSN}。按式(5)計算每個染色體的適應度,適應度最大的染色體為蜂王q,其他的為雄蜂dri。
步驟2婚飛
步驟3繁殖過程
受精囊中每只雄蜂dri與蜂王按兩點雜交法交配,產生兩個幼蜂bri和bri'。
步驟4飼養過程
本文中將變異算子代表工蜂來飼養幼蜂:隨機選擇一個整數j∈[1,K],利用驗證集M隨機抽取m個樣本形成訓練樣本集Mb,訓練出一棵決策樹,替代原幼蜂的第j個基因,生成一只新幼蜂。
步驟5生成新種群
如果適應度最大的新幼蜂優于蜂王,則將其與蜂王交換,否則不變。從父親相應的兩只幼蜂中選擇最優的一只替代已死亡的父親(雄蜂)。
步驟6若當前迭代次數大于最大次數mfN,則停止迭代;否則轉到步驟3,T=T+1。
4 人體姿態識別
本文提出的基于三軸加速度傳感器與改進隨機森林算法的人體姿態識別結構如圖2 所示。從圖中可以看出,人體姿態識別過程為:首先采集測試者運動時產生的加速度信號,標識行為標記,對采集到的數據進行檢查,選擇有效數據;然后將這些加速度信號進行特征提取,形成特征向量;最后使用這些特征向量訓練模型和分類識別。
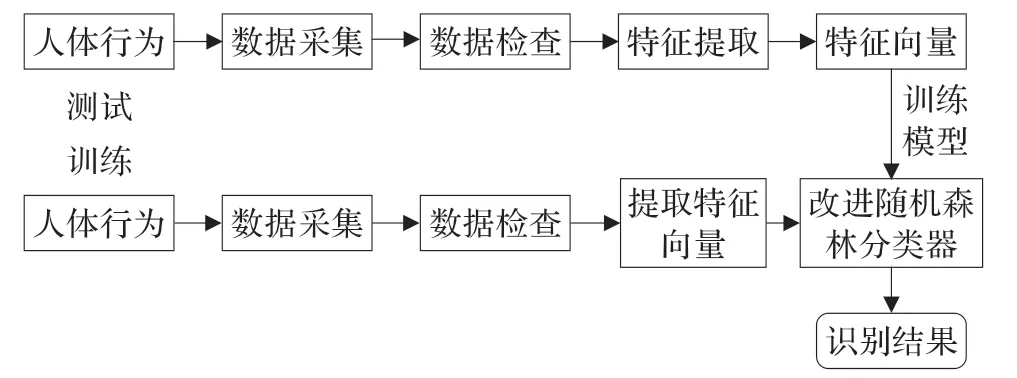
圖2 人體姿態識別結構圖
4.1 數據采集
(1)數據采集
數據采集系統主要由三部分組成:加速度信號采集模塊、無線接收模塊、PC 端控制軟件,具體如圖3 所示。加速度信號采集模塊包括一個三軸加速度傳感器和一個無線發送器。采集模塊佩戴在測試者的腰部,用于采集測試者運動時的加速度信號。無線接收模塊相當于一個網關,接收采集模塊傳送過來的無線數據,并通過串口將數據傳輸到PC 端控制軟件。PC 端控制軟件用于控制數據采集模塊的啟動和進行數據的存儲。
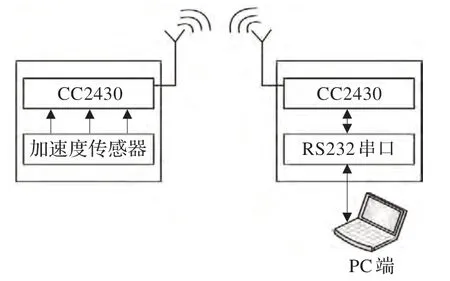
圖3 數據采集系統框圖
(2)硬件設計
在硬件設計中,三軸加速度傳感器采用Freescale 公司的MMA7260。該傳感器采用了信號調理、單級低通濾波器和溫度補償技術,并且提供了4 個可選量程(1.5g/2g/4g/6g)。無線通信模塊采用德州儀器公司的CC2430 節點。該芯片內置增強的8051 微控制器內核和適用于IEEE 802.15.4 標準的無線模塊,通過ADC 轉換器采集加速度信號,并及時傳送到無線接收模塊。其中,數據采集速度為40 Hz,無線比特率為250 kb/s。無線接收模塊CC2430 節點,將接收到的數據信息通過RS232 串口實時轉發給PC 端控制軟件。
4.2 特征提取
4.2.1 通用特征矢量
常用的特征矢量有:均值(mean)、信號幅值面積(SMA)、均方根(RMS)、兩軸之間的相關系數(corr)、能量(energy)和FFT 系數等。在本文中,引用了下面三種特征矢量:
(1)均值:滑動窗口內每個軸方向加速度值的平均值,如式(6)所示。

其中k表示滑動窗口的長度,A(j)為三軸方向之一的加速度值。
(2)均方根:某一條記錄三軸方向加速度值平方和的根,如式(7)所示。
建設工程施工中要考慮影響安全管理的各個因素,并采取積極的應對措施進行嚴格的管理。在安全監管方面,應建立健全的監管體系,加強對施工人員及管理人員的管理,增強各部門之間的溝通交流。將各部門的崗位職責進行詳細的分工,明確安全責任劃分。根據工程性質和工程特點細化安全管理制度,提高管理制度的可操作性和合理性。從監管體系上對人員進行嚴格的要求,規范工作人員的行為。

(3)信號幅值面積:滑動窗內三軸方向加速度值之和的窗口長度歸一化值。如式(8)所示。

其中xi,yi,zi表示XYZ軸的加速度值,w為滑動窗的大小。
4.2.2 新特征矢量
人體運動時,運動速度不同將導致加速度信號變化程度也不一樣,不同的動作加速度的變化速率也不同。因此,本文提出了兩種體現加速度變化速率的特征矢量。
(1)近斜率(Approximation Slope,APS),該特征矢量以貝塞爾曲線計算方法為參照求得。取臨近的四個點(前后各兩個點),求前后兩部分的中值之差的三等分,其值近似于斜率,如公式(9)。如取(0,2)、(2,4.5)、(4,6)、(6,5)、(8,3)五個點,先求取其相鄰兩點的中值,再以首尾值之差除以三個單位獲得近斜率值,近斜率直線則是以該值作為斜率的直線,如圖4 所示。

(2)前后差(Front and Rear Subtract,FRS),該特征矢量為相鄰時刻加速度值之差,代表相鄰加速度的變化速率,如式(10)所示。

其中A(i)表示三軸方向之一的加速度值。
本文共提取了5類特征矢量,特征向量為:V(i)={AS(i),MEANS(i),RMS(i),SMA(i),APSS(i),FRSS(i)},其中AS(i),MEANS(i),APSS(i),FRSS(i)分別包含XYZ軸的加速度值、均值、近斜率值和前后差值。
5 實驗驗證與分析
5.1 實驗設計
為了驗證本文算法和所提取的特征的有效性,實驗中采集了五種日常行為和一種異常行為,其行為類型和行為產生規則如表1 所示。本實驗選擇了7 名測試者(5男2 女,平均身高1.7 m,平均年齡25 歲,身體無明顯疾病)在自愿的情況下進行。
根據文獻[8]的實驗研究表明:測試者佩戴采集器的位置在很大程度上會影響實驗結果,將傳感器固定在大腿部位時識別率最高,其次是固定在腰部位置。在本文實驗中,所有測試者的采集器都佩戴在腰部。實驗中,每名測試者分別連貫地執行上述各類動作各5 次,并標記動作之間的轉換過程。每個測試者分別間斷地執行上述各類動作各5 次。
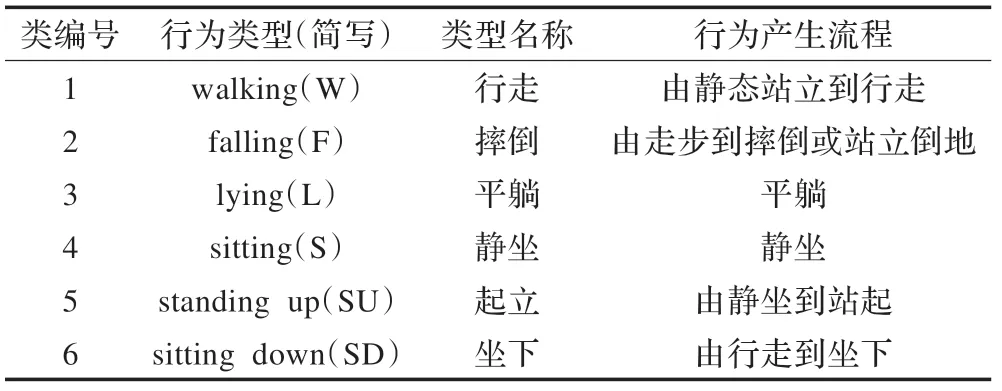
表1 行為類型和行為產生規則
5.2 實驗結果與分析
為了描述“正常行走-坐下-靜坐-起立-正常行走-摔倒-倒地躺下”這一系列連續動作的加速度信號值變化情況,本文繪制了x、y、z軸的加速度值變化情況波形圖,如圖5 所示。同時,根據式(8)、式(9)和式(5)分別計算了x、y、z軸的近斜率、前后差和均值,并繪制了與上述連續動作相對應的變化情況(為使圖更清晰,在圖中將y、z軸的值向上平移),如圖6、圖7 和圖8 所示。由圖5 可知連續動作過程中三軸加速度值的變化情況,且在行走過程中還存在噪聲數據。圖7 中的近斜率值反映了加速度值的變化快慢,在某一時刻加速度值波動比較大時,反應比較強烈,近斜率值變化比較大。與圖8的均值相比較,近斜率更能反應加速度值的變化程度。圖7 中的前后差反應了相鄰時刻加速度值的變化程度。
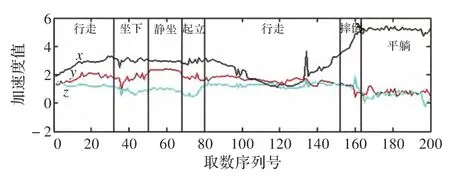
圖5 原始加速度值波形圖
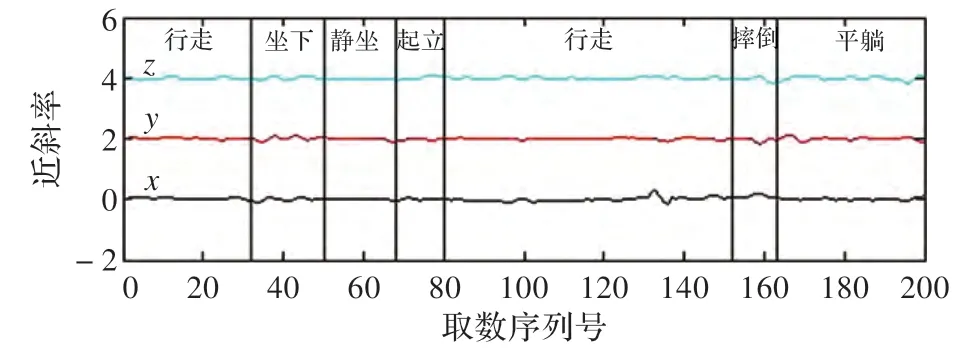
圖6 近斜率值波形圖
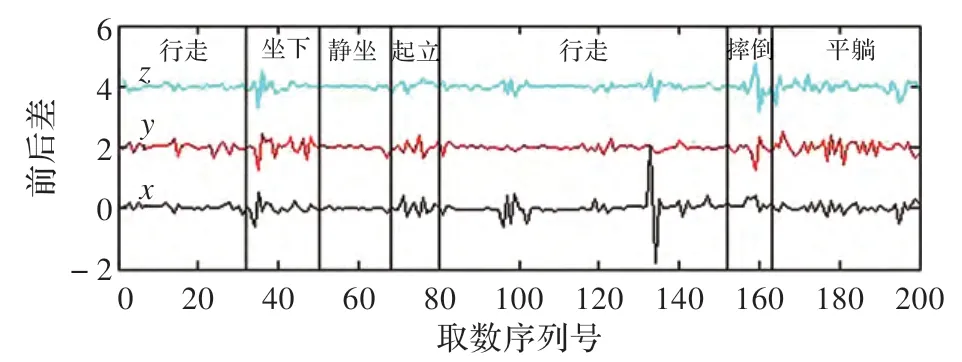
圖7 前后差值波形圖
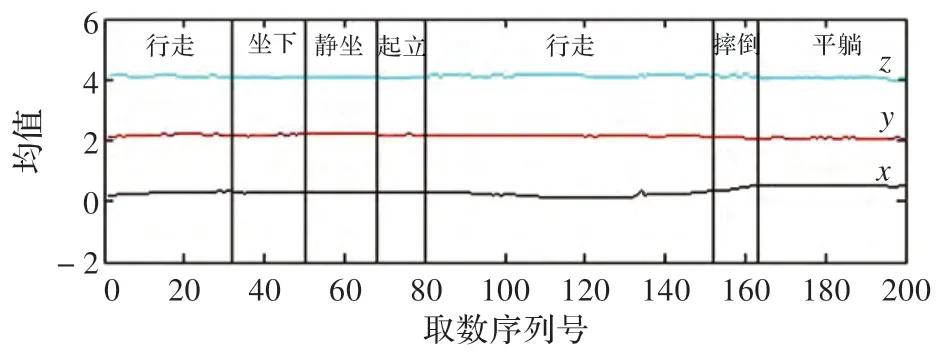
圖8 均值波形圖
特征選擇是利用一系列的規則,得到特征重要程度的相對關系[1]。隨機森林通過對特征重要性進行度量的方式實現特征排名,常用的技術包括:(1)對特征作為分割特征的次數進行統計,并用特征作為分割特征的頻度來表示它的重要程度;(2)構建決策樹的時候,節點的分割效果度量采用基尼指數的方法,即通過計算特征的“Gini Importance”來表明特征的重要性程度等[13]。本文為了突顯根節點在整個決策樹中的重要性,選擇特征時賦予權值,如式(11)。

其中c(t,s,i)表示權值,如果特征i被根節點選擇為分割特征,則c(t,s,i)=2,如果特征被其他節點選擇為分割特征,則c(t,s,i)=1,否則c(t,s,i)=0。其中,treeNum表示隨機森林中決策樹棵數,s表示分割序列。
經過特征選擇,抽取了三個數據集,其類別數為6、屬性維度數為14,其他特征如表2 所示。為了測試算法對噪聲數據的容忍度,所采集的數據不對噪聲數據進行處理。
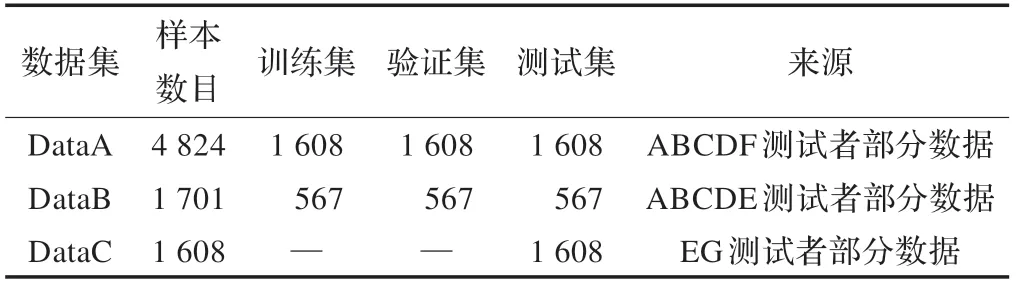
表2 實驗中所涉及的數據集
為了驗證本文算法進行人體姿態識別的可行性、有效性和魯棒性,本文進行了多種實驗。實驗過程中的參數設置為,RF 算法:決策樹棵數treeNum=100;本文算法:蜂王數QN=1,雄蜂數DN=99,受精囊容量sC=50,決策樹棵數treeNum=100,最大迭代次數mfN=1 000,E(0)=0.8,end_E=0.1,S(0)=0.8,μ=0.98。
(1)特征矢量使用頻度分析
通過隨機森林算法對數據集DataB 進行特征矢量使用頻度實驗,在保證準確率達到90%以上的情況下,隨機森林屬性的使用頻度如圖9 所示。從圖中可以看出,APS 和FRS 所占比重比較大。經統計:所有屬性總使用 頻度為5 312 次,APS 和FRS 使用 頻度為2 620 次,所占比重為49.3%。其中APSx 使用頻度最高,APSz 次之,APS 和FRS 的使用頻度都高于或者等于其他特征的使用頻度。特征作為分割特征的次數越多,則該特征就越重要。因此,APS 和FRS 兩組特征矢量對人體姿態識別的重要意義。
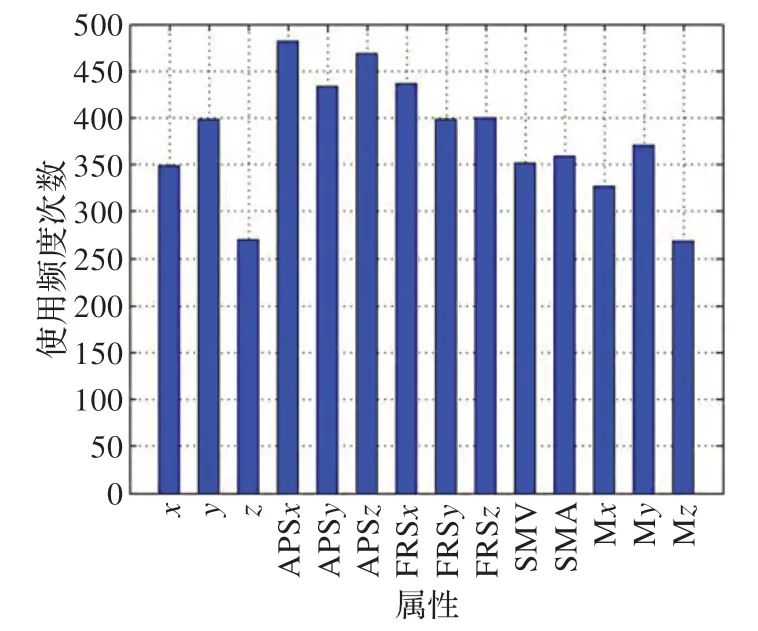
圖9 屬性使用頻度圖
(2)接收者操作特征曲線
接收者操作特征(ROC)曲線是一種比較兩個分類模型的有效工具,曲線顯示了給定模型的真正例率(TPR)和假正例率(FPR)之間的權衡[14]。RF 和本文算法在進行最優分類投票時計算類預測概率,模型給出每個檢驗元組的類預測概率(CP(i)=正確類票數/總票數)。從數據集DataA 中隨機選擇50 個檢驗元組(包含25 個正元組(falling)和25 個負元組(walking))進行分類之后,將檢驗元組按概率的遞減排序,并計算元組的TPR和FPR,將所求數據進行5 階多項式曲線擬合后得到的ROC 曲線,如圖10 所示。
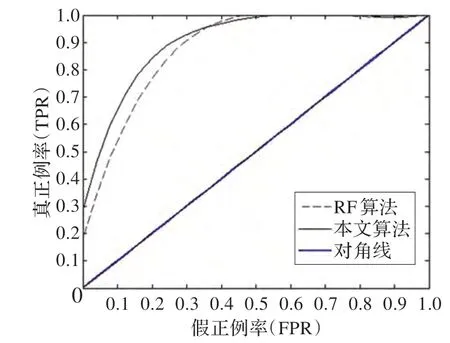
圖10 RF 及本文算法的ROC 曲線
圖10 給出了RF 和本文算法的ROC 曲線,對角線代表隨機猜測。模型的ROC 曲線離對角線越近,模型的準確率就越低。由圖10 可知,本文算法離對角線遠于RF 算法,且本文算法曲線開始遇到真正例元組,隨元組向高編號移動,曲線陡峭上升,后來,遇到的真正例元組越來越少,假正例元組越來越多,曲線平緩并變得更加水平。由此可見,相比RF 算法,本文算法更準確,分類預測效果更佳。
(3)人體姿態識別結果分析
為了進一步驗證本文算法的性能,進行了如下兩組實驗。
實驗1:使用數據集DataA 訓練分類模型和測試分類模型。
實驗2:使用數據集DataA 訓練分類模型,選取數據集DataC 測試分類模型。
通過實驗1 和實驗2 得到本文算法的適應度隨迭代次數增加的變化情況如圖11 所示。
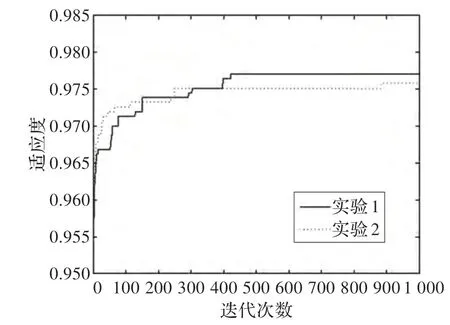
圖11 實驗1 和實驗2 適應度變化情況
由圖11 可知:因初始蜜蜂性質優良,適應度值變化范圍較小,并在迭代過程中不斷改變。每次迭代中,蜂王與優良的雄蜂交配產生的幼蜂繼承了蜂王優良基因,所以子代種群向最優解進化的可能性變大,算法能快速收斂于局部最優。隨著迭代次數的增加,不斷引入隨機蜜蜂,保持進化種群多樣性,使算法能多次跳出局部最優,最終達到全局最優。雖然RF 因兩大隨機思想的引入,克服了單一分類器的過度擬合的缺點,但算法的穩定性仍然較差,本文算法引入蜜蜂交配優化算法,增強了RF 算法的穩定性。此可見,本文算法能有效地避免陷入局部極值,具有很強的全局搜索能力和穩定性。
為了進一步驗證本文算法的性能,本文按照實驗1和實驗2 進行了10 次獨立實驗,每次以不同的隨機種子來獲取訓練集Di以及屬性子集,生成不同的初始蜂群。對10 次實驗結果求得平均準確率,并將實驗結果與RF、SVM 算法進行比較,如表3 所示。
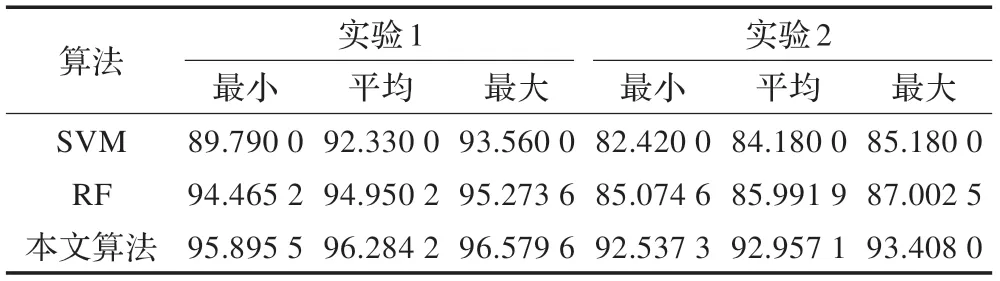
表3 各分類算法分類準確率比較 %
通過表3 中的實驗結果可知,改進后的隨機森林算法在準確率方面有很大的提高,在實驗1 中最大準確率達到96.579 6%,比RF 算法的最大準確率高出1.37%,比SVM 高出3.23%。在實驗2 中本文算法的最大準確率比RF 算法高出7.36%。且與實驗一的最大準確率相比,相差僅為3.17%,而RF 算法的最大準確率卻相差8.27%。這說明了本文算法對人體姿態識別不僅準確率高,而且魯棒性更強。在實驗1 和實驗2 中,本文算法的最低準確率遠高于SVM、RF 算,且最小準確率和最大準確率相差甚小,說明了本文算法穩定性較強,對不同測試者的人體姿態識別有較強的適應性。
為進一步分析分類結果,獲得每個類的識別率,分析了實驗中RF 和本文算法獲得最大準確率時相關的混淆矩陣,如表4~表7 所示。其中,行代表原始數據的類別,列代表預測的類別。
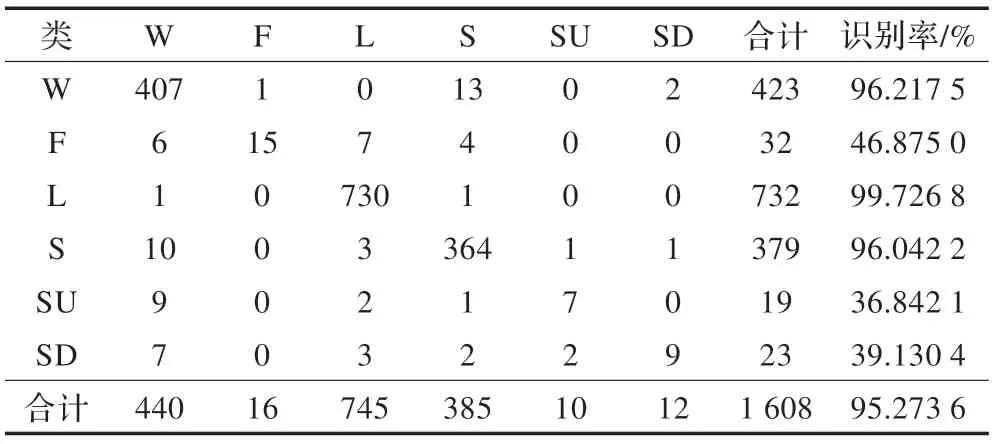
表4 實驗1 RF 算法分類結果混淆矩陣
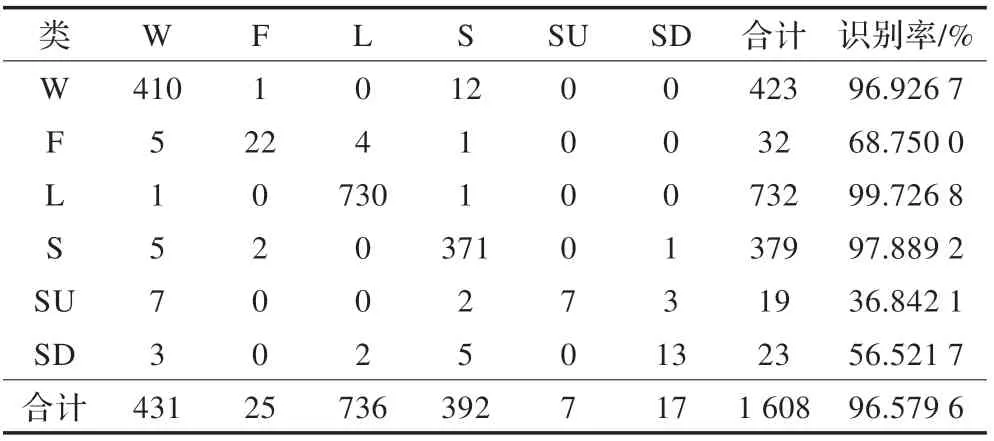
表5 實驗1 本文算法分類結果混淆矩陣
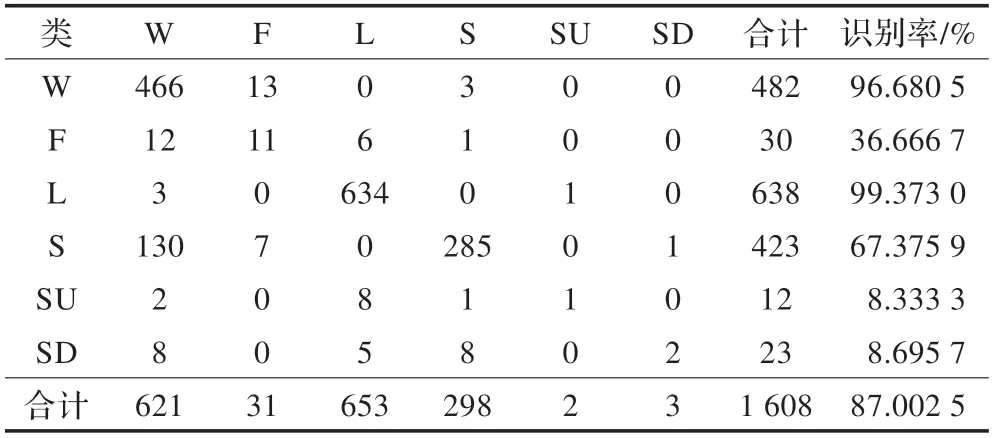
表6 實驗2 RF 算法分類結果混淆矩陣
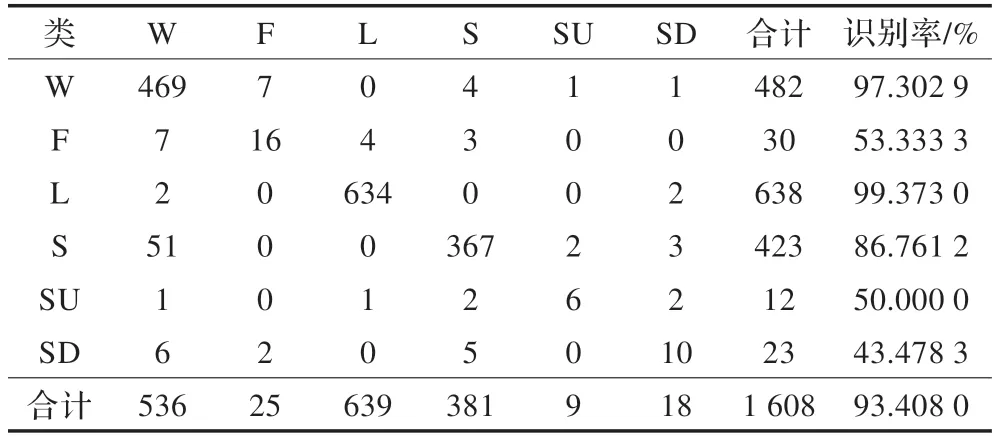
表7 實驗2 本文算法分類結果混淆矩陣
從表4 和表5、表6 和表7 的對比結果可以看出,對于六種行為的識別率,本文算法均高于RF 算法。實驗1和實驗2 用于測試模型的數據集來源不同,測試者之間身體差異等原因將導致所采集的加速度規律會有所區別。從表4 和表6 中可以看出,RF 算法對F 行為的識別率低于50%,而本文算法的識別率能達到60%左右;對SU 和SD 的識別率低于40%,而本文算法的識別率能達到50%左右。F 識別率低,主要是被錯誤地識別為W 和L 行為,因為數據采集過程中存在一些噪聲數據而導致;SU 和SD 主要被錯誤的識別為W 和S 等行為,因為這些行為有些接近,但通過結果比較可知,本文算法對噪聲數據具有更好的處理能力。
6 結束語
通過建立三軸加速度傳感器MMA7260 和CC2430節點相結合的數據采集系統獲取人體運動時的加速度信號,設計了兩類特征矢量:近斜率和前后差,并結合均值、均方根和SMA 作為所選特征矢量集,以此作為判斷標準,最后采用蜜蜂交配優化隨機森林作為識別算法。本文算法通過動態調整蜜蜂間的基因,來提高了算法的最優解搜索的效率,并在迭代中不斷地引入新基因,提高了蜂群的多樣性,使算法能多次跳出局部最優解而達到全局最優解。通過對人體六種行為進行檢測,證明了本算法的可行性、穩定性、魯棒性和準確性。
[1] 薛洋.基于單個加速度傳感器的人體運動模式識別[D].廣州:華南理工大學,2011.
[2] Wang S,Yang J,Chen N,et al.Human activity recognition with user-free accelerometers in the sensor Networks[C]//IEEE Int Conf Neural Networks and Brain,2005,2:1212-1217.
[3] Wu J H,Pan G,Zhang D Q,et al.Gesture recognition with a 3-D accelerometer[J].Ubiquitous Intelligence and Computing,2009,5585(6):25-38.
[4] Li M,Rozgic V,and Thatte G,et al.Multimodal physical activity recognition by fusing temporal and cepstral information[J].IEEE Trans on Neural Systems and Rehabilitation Engineering,2010,18(4):1-10.
[5] Cheng W Ch,Jhan D M.Triaxial accelerometer based fall detection method using a self-constructing cascade-Ada-Boost-SVM Classifier[J].IEEE Journal of Biomedical and Health Informatics,2013,17(2):411-419.
[6] Preece S J,Goulermas J Y,Kenney L P J,et al.A comparison of feature extraction methods for the classification of dynamic activities from accelerometer data[C]//IEEE Trans on Biomedical Engineering,2009,56:871-879.
[7] Yang J,Wang S Q,Chen N J,et al.Wearable accelerometer based extendable activity recognition system[C]//IEEE Int Conf on Robotics and Automation Anchorage Convention District,2010:3641-3647.
[8] Lin B,Intille S S.Activity recognition from user-annotated acceleration data[C]//Proc of the 2nd International Conference on Pervasive Computing.Berlin:Springer,2004:1-17.
[9] Van L K,Gellersen H W.Spine vs.porcupine:a study in distributed wearable activity recognition[C]//The Eighth IEEE International Symposium on Wearable Computers,Washington DC,USA,2004:142-149.
[10] Song S K,Jang J,Park S.An efficient method for activity recognition of the elderly using tilt signals of tri-axial acceleration sensor[C]//Proc of 6th Int Conf on Smart Homes and Health Telematics,2008:99-104.
[11] LEO B.Random forests[J].Machine Learning,2001,45:5-32.
[12] Abbass H A.MBO:marriage in honey bees optimization:a haplometrosis polygynous swarming approach[C]//Proc of IEEE Congress on Evolutionary Computation.[S.l.]:IEEE Service Center,2001:207-214.
[13] Menze B H,Kelm B M,Masuch R,et al.A comparison of random forest and its Gini importance with standard chemometric methods for the feature selection and classification of spectral data[J].BMC Bioinformaties,2009,10(213).
[14] Han J W,Kamber M,Pei J.數據挖掘概率與技術[M].范明,孟小峰,譯.北京:機械工業出版社,2012:211-254.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52