擬合法和平差法在點(diǎn)云中建立物體曲面的比較
2015-04-18 07:18:50段存宏
關(guān)鍵詞:測(cè)量
段存宏
(中國(guó)人民解放軍 61175部隊(duì),山東 淄博 255000)
擬合法和平差法在點(diǎn)云中建立物體曲面的比較
段存宏
(中國(guó)人民解放軍 61175部隊(duì),山東 淄博 255000)
使用3D激光掃描儀的目的是獲取物體的表面形狀.現(xiàn)在大多使用擬合的方法對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行處理來(lái)建立曲面.以約束球?yàn)槔龑?duì)以最小二乘為準(zhǔn)則的擬合法和平差法進(jìn)行了討論,擬合法雖然有一定的優(yōu)點(diǎn),但同時(shí)也存在不能對(duì)數(shù)據(jù)進(jìn)行精度評(píng)定的不足,而平差法正好彌補(bǔ)了這一缺陷.除此之外,平差法還可求出參數(shù)的點(diǎn)位中誤差,進(jìn)而可畫出誤差橢球,豐富了點(diǎn)云數(shù)據(jù)的處理過(guò)程,使點(diǎn)云數(shù)據(jù)的處理結(jié)果趨于形象化,為點(diǎn)云處理提供了新的思路.
擬合法;平差法;物體曲面;點(diǎn)云處理
高速3D激光掃描儀和擁有持續(xù)掃描探測(cè)坐標(biāo)的測(cè)量?jī)x正在更多的應(yīng)用到采集物體表面點(diǎn)數(shù)據(jù)的實(shí)踐中.由于這些點(diǎn)數(shù)據(jù)具有很高的密度,所以通常被稱作點(diǎn)云[1].利用空間三維點(diǎn)云數(shù)據(jù)建立曲面有許多可行的算法,這些算法包括Hoppe的水平集算法[2],Bernardini的球旋轉(zhuǎn)算法,Amenta的外殼算法[3]等.在測(cè)量中一般使用曲面擬合法,對(duì)點(diǎn)云數(shù)據(jù)自由參數(shù)的曲面擬合是計(jì)算機(jī)輔助設(shè)計(jì)和計(jì)算機(jī)制圖中遇到的基本問(wèn)題[4].
一般的曲線和曲面的擬合方法的目的是通過(guò)點(diǎn)云得到一個(gè)近似的物體表面形狀[5],沒(méi)有進(jìn)行結(jié)果的精度評(píng)定.在測(cè)量中,對(duì)測(cè)量結(jié)果進(jìn)行精度評(píng)定是重要的一步,它可以直觀的表現(xiàn)出測(cè)量結(jié)果的好壞以及是否達(dá)到工程要求.通過(guò)基于多因素決定的最小二乘準(zhǔn)則,通常能得到關(guān)于結(jié)果精度和準(zhǔn)確性的可靠信息[6].以最小二乘為準(zhǔn)則的擬合法能夠把誤差的影響降到最小,但這種方法存在著許多不足之處.擬合法采用的是多項(xiàng)式,如果待求參數(shù)存在非獨(dú)立項(xiàng),則參數(shù)之間只有滿足相應(yīng)的關(guān)系才能得到預(yù)期的擬合面,而擬合沒(méi)有對(duì)相關(guān)項(xiàng)的約束;觀測(cè)值是帶有誤差的,擬合沒(méi)有考慮觀測(cè)值誤差的影響.平差法是依據(jù)最小二乘準(zhǔn)則,由一系列帶有觀測(cè)誤差的測(cè)量數(shù)據(jù)來(lái)求定未知量的最佳估值及精度.本研究以約束球?yàn)槔龑?duì)擬合法與附有參數(shù)的條件平差法進(jìn)行了比較,得到了比較嚴(yán)謹(jǐn)?shù)慕Y(jié)論.文中把半徑已知的球稱為約束球,半徑未知的球稱為自由球.
1 球面擬合原理
根據(jù)文獻(xiàn)[8],用X={Xi,i=1,…,m}表示一系列形成目標(biāo)曲面的數(shù)據(jù)點(diǎn),用S(u,v,P)表示B樣條曲面,其中P={P0,…,Pn}為曲面S(u,v,P)的控制點(diǎn),u,v為曲面S(u,v,P)的參數(shù).擬合的準(zhǔn)則為
(1)
式中d(S,Xi)是Xi到S(u,v)的垂直距離,d(S,Xi)=‖Xi-S(ui,vi)‖,fs是P的一個(gè)二次函數(shù).
(u,v,w)為球心坐標(biāo),r為球的半徑,k點(diǎn)應(yīng)滿足方程:
(2)
展開(kāi)式(2),兩邊同除-(u2+v2+w2-r2),并用A,B,C,D表示系數(shù)得到
(3)
由A,B,C,D計(jì)算u,v,w,r公式為
(4)
根據(jù)上述擬合原理用EEXLT程序(平臺(tái)為IDL語(yǔ)言)對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行處理,得到約束球未知參數(shù)u,v,w,r的值.
2 約束球的三個(gè)位置特征參數(shù)確定
在掃描點(diǎn)的過(guò)程中,只能得到物體表面的點(diǎn)的數(shù)據(jù).在將規(guī)則物體作為標(biāo)靶時(shí),往往需要確定該物體的其他參數(shù).因此,把該參數(shù)作為未知參數(shù)參與平差過(guò)程,這就是在測(cè)量工作中經(jīng)常用到的附有未知參數(shù)的條件平差.
平差的數(shù)學(xué)模型為

(5)

依據(jù)最小二乘準(zhǔn)則min= VTV最終可得
(6)
(7)
(8)
(9)
式中

(10)
(11)
(12)
對(duì)于n(n>4)個(gè)點(diǎn)組成方程

(13)
系數(shù)陣A的形式為
其中?表示1×3的0矩陣,球心坐標(biāo)和點(diǎn)云三維坐標(biāo)的改正數(shù)可由公式(6)、(7)得到,所以約束球的三個(gè)位置特征參數(shù)得到確定.
球心坐標(biāo)的點(diǎn)位中誤差公式為
(14)
式中Quu、Qvv、Qww可由
根據(jù)Cardan解法可以求出誤差橢球的三個(gè)特征值,進(jìn)而可以求出主軸向量畫出誤差橢球來(lái)形象表示圓心坐標(biāo)在各個(gè)方向上的誤差.
3 實(shí)驗(yàn)分析
3.1 實(shí)驗(yàn)數(shù)據(jù)
本實(shí)驗(yàn)數(shù)據(jù)是由3D激光掃描儀得到的四組球面測(cè)量數(shù)據(jù),在進(jìn)行本實(shí)驗(yàn)前須先對(duì)掃描數(shù)據(jù)進(jìn)行剔除粗差很大的噪聲點(diǎn)的預(yù)處理工作.
3.2 參數(shù)結(jié)果對(duì)比及分析
通過(guò)用EEXLT程序(平臺(tái)為IDL語(yǔ)言)對(duì)數(shù)據(jù)分別進(jìn)行處理,完成約束球的擬合與平差過(guò)程,得到的參數(shù)差值(平差參數(shù)值-擬合參數(shù)值)見(jiàn)表1.
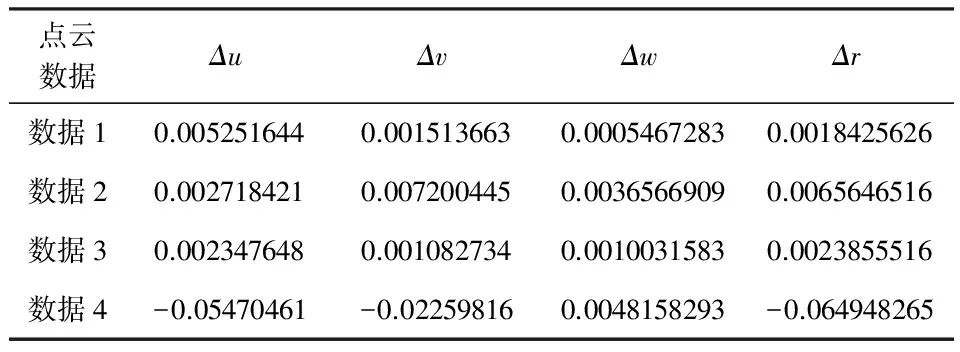
表1 3D激光掃描數(shù)據(jù)差值表 m
從數(shù)據(jù)差值表中可以看出擬合得到的約束球的四參數(shù)與平差得到的相差不大.原因是在進(jìn)行實(shí)驗(yàn)前對(duì)數(shù)據(jù)進(jìn)行了大量的預(yù)處理工作,除去了誤差大的點(diǎn),使用的是數(shù)據(jù)誤差都比較小.
3.3 平差法進(jìn)行精度評(píng)定
使用擬合法無(wú)法對(duì)參數(shù)結(jié)果進(jìn)行精度評(píng)定,而平差法可以.使用平差法時(shí)可用中誤差σ做為評(píng)定精度指標(biāo),但前提是數(shù)據(jù)只存在偶然誤差,而在實(shí)際測(cè)量過(guò)程中還存在著系統(tǒng)誤差和粗差,所以需要驗(yàn)證該實(shí)驗(yàn)數(shù)據(jù)是否大致符合偶然誤差的四個(gè)性質(zhì).將點(diǎn)在geomegic軟件中打開(kāi),并且導(dǎo)入擬合球面數(shù)據(jù)將其封裝得到圖1~4.
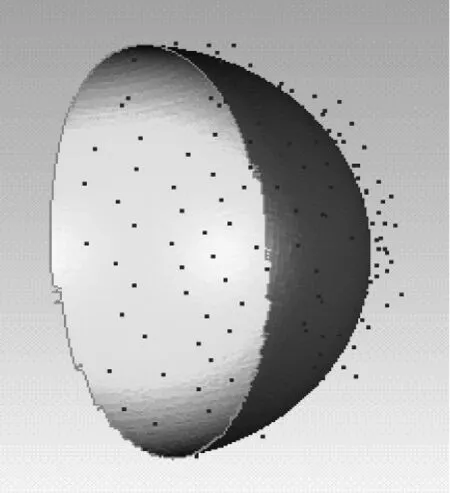
圖1 3D激光掃描數(shù)據(jù)1
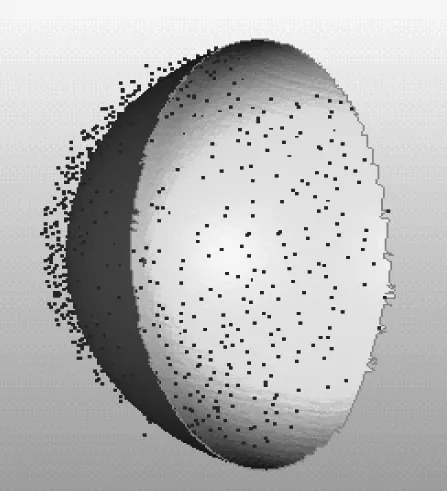
圖2 3D激光掃描數(shù)據(jù)2
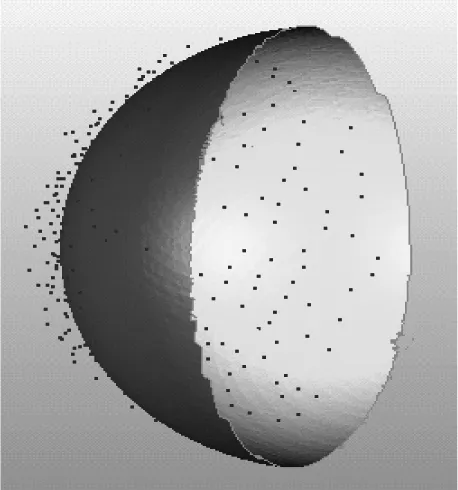
圖3 3D激光掃描數(shù)據(jù)3
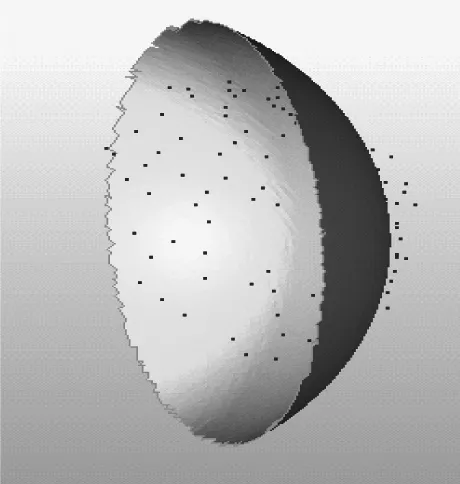
圖4 3D激光掃描數(shù)據(jù)4
由圖可證實(shí)偶然誤差的兩個(gè)性質(zhì):在一定觀測(cè)條件下,誤差的絕對(duì)值有一定的限制;絕對(duì)值較小的誤差比絕對(duì)值較大的誤差出現(xiàn)的概率大.對(duì)于性質(zhì)3(絕對(duì)值相等的正負(fù)誤差出現(xiàn)的概率相等)和性質(zhì)4(偶然誤差的數(shù)學(xué)期望為0)可由表2(n1為擬合球面上的點(diǎn),n2為擬合球面下的點(diǎn)數(shù),N為總點(diǎn)數(shù))看出,所以用中誤差σ可以較好的地表示計(jì)算精度.
表2 3D激光掃描數(shù)據(jù)點(diǎn)數(shù)表

點(diǎn)云數(shù)據(jù)n1n2Nn1Nn2NE(Δ)數(shù)據(jù)1126862120.594339620.405660380.001815數(shù)據(jù)23935459380.418976550.58102345-0.00122數(shù)據(jù)32681524200.638095240.36190476-0.00073數(shù)據(jù)458721300.446153850.55384615-0.00637
使用擬合法和平差法都可對(duì)數(shù)據(jù)進(jìn)行處理,處理結(jié)果由表1可以看出相差不大,但平差法可以對(duì)結(jié)果數(shù)據(jù)進(jìn)行精度評(píng)定.可計(jì)算出球心坐標(biāo)的點(diǎn)位中誤差.
表3 參數(shù)的點(diǎn)位中誤差
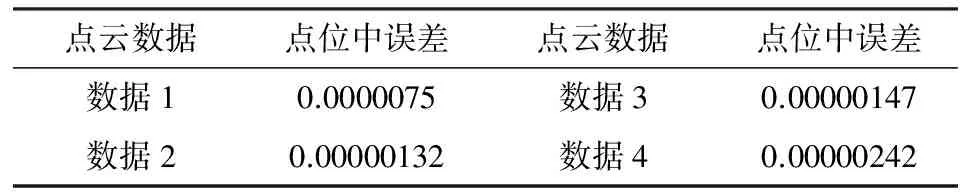
點(diǎn)云數(shù)據(jù)點(diǎn)位中誤差點(diǎn)云數(shù)據(jù)點(diǎn)位中誤差數(shù)據(jù)10.0000075數(shù)據(jù)30.00000147數(shù)據(jù)20.00000132數(shù)據(jù)40.00000242
引用Cardan解法可以得到結(jié)果數(shù)據(jù)的誤差橢球,可以看出圓心坐標(biāo)在各個(gè)方向上的誤差,為了形象展示立體效果,用geomagic封裝,如圖5~8所示.
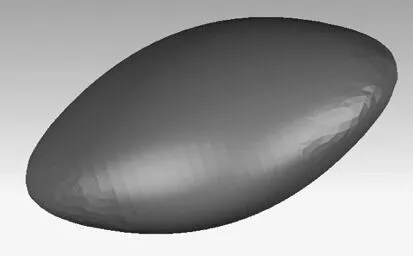
圖5 數(shù)據(jù)1處理結(jié)果的誤差橢球
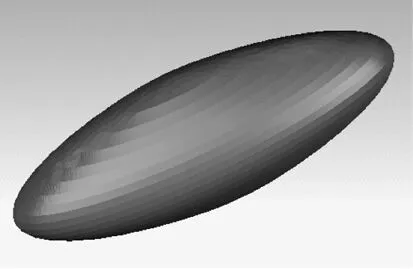
圖6 數(shù)據(jù)2處理結(jié)果的誤差橢球
圖7 數(shù)據(jù)3處理結(jié)果的誤差橢球
圖8 數(shù)據(jù)4處理結(jié)果的誤差橢球
4 結(jié)論
通過(guò)理論分析與實(shí)驗(yàn)證明可得到以下結(jié)論:
1) 在測(cè)量數(shù)據(jù)存在較小系統(tǒng)誤差的情況下,通過(guò)擬合方法得到的結(jié)果與平差得到的相當(dāng);在測(cè)量數(shù)據(jù)存在較大系統(tǒng)誤差的情況下,擬合法得到的結(jié)果比平差法得到的要精確一些.
2) 平差方法具有擬合法所不具備的一些特征.由平差法可求出參數(shù)的點(diǎn)位中誤差,進(jìn)而可畫出誤差橢球,豐富了點(diǎn)云數(shù)據(jù)的處理過(guò)程,使點(diǎn)云數(shù)據(jù)的處理結(jié)果趨于形象化.
3) 在實(shí)際的測(cè)量過(guò)程中系統(tǒng)誤差不可避免的會(huì)出現(xiàn),這對(duì)使用平差法有一定的影響,所以在使用平差法前要對(duì)數(shù)據(jù)進(jìn)行更加精確的預(yù)處理.
[1]DaoS,OuY.Onthenormalvectorestimationforpointclouddatafromsmoothsurfaces[J].Computer-AidedDesign(PEG),2005, 3 (7) :1071-1079.
[2] 張睿智. 結(jié)合模糊理論的灰度不均勻圖像水平集分割算法研究[D]. 南京: 南京理工大學(xué),2014.
[3] 牛玉美. 基于CUDA的可視外殼并行計(jì)算方法研究[D].青島:中國(guó)石油大學(xué),2011.
[4]PengBB,WenP,WangA.Arevisittofittingparametricsurfacestopointclouds[J].Computers&Graphics(PEG),2012,36(1):534-540.
[5]SimonF,F(xiàn)ittingcurvesandsurfacestopointcloudsinthepresenceofobstacles[J],ComputerAidedGeometricDesign.(PEG),2009,26(1): 192-202.
[6] 潘國(guó)榮, 房鶴飛, 唐杭. 基于等效全最小二乘準(zhǔn)則的穩(wěn)健球面擬合方法[J].測(cè)繪通報(bào), 2013,S1:99-102.
(編輯:劉寶江)
The comparison research of fitting and the compensation oferrors in setting the object surface in the point cloud
DUAN Cun-hong
(61175 Troops,The Chinese People′s Liberation Army,Zibo 255000,China)
The purpose of using a 3D laser scanner is to obtain the shape of the object surface. Now the fitting method is mostly used to process point cloud data to create the surface. In this study, we took the restraint ball as an example, and developed the scientific and deeply discussion on fitting method and the compensation of errors, based on the rule of the least squares. Although there are certain advantages of the fitting method, it can’t give the accuracy judgement of the data at the same time. However, the compensation of errors make up the disadvantage. Besides, the second method can also make out the point error of the parameters, then draw out the error ellipsoid. It enriches the process of point cloud data, make the processing result of point cloud data tend to be visualized, and provides a new way of thinking for point cloud processing.
fitting; the compensation of errors; the object surface; point cloud processing
2015-01-30
段存宏, 男, 275503036@qq.com
1672-6197(2015)06-0039-04
P
A
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00