基于空間矢量變換的TCR控制裝置的仿真與設計
2015-04-22 05:48:14李銘胡桂明王威楊麗
電氣開關 2015年4期
李銘,胡桂明,王威,楊麗
(廣西大學 電氣工程學院,廣西 南寧 530004)
?
基于空間矢量變換的TCR控制裝置的仿真與設計
李銘,胡桂明,王威,楊麗
(廣西大學 電氣工程學院,廣西 南寧 530004)
對負載側進行無功補償是改善電能質量問題的有效手段。TCR+FC型SVC憑借其穩定的性能,相對低廉的造價成為用戶的首選。通過MATLAB中的SIMULINk對基于空間矢量變換的補償算法進行仿真,在此基礎上,設計一種以DSP芯片和CPLD芯片為核心的TCR控制裝置,以解決現有SVC存在的響應速度較慢、晶閘管觸發脈沖抗干擾性弱等問題。
晶閘管控制電抗器;靜止無功補償;復雜可編程邏輯器件;矢量變換
1 引言
隨著我國工業和科技的飛速發展,諸如電氣化鐵路、軋鋼機、電弧爐等具有非線性、不平衡性等特性的沖擊性負荷,在電網中的比例逐年升高。在負載側進行無功補償以成為改善電能質量問題的有效手段。TCR(Thyristor Controlled Reactor,晶閘管控制電抗器)型SVC(Static Var Compensator,靜止無功補償裝置)具有結構簡單、技術成熟、實用便利等優點,所以目前乃至今后一定時間它仍將是用戶進行無功補償時的首選[1,2]。
針對TCR的補償算法現在有很多,例如特定時刻采樣法、平均功率法等,但都有各自的局限性和缺點。本文采用基于空間矢量變化的補償算法,以DSP芯片和CPLD芯片為核心,設計一種TCR控制裝置,用以解決現有算法和裝置存在的響應速度較慢、晶閘管觸發脈沖抗干擾性弱等問題。
2 基于空間矢量變換的補償算法
2.1 與對稱分量法
斯坦門茨(C.P.Steinmetz)平衡化原理主要用于對三相不對稱負荷進行補償,并且可以實現分相補償。通過向負荷加載補償電感或電容實現三相平衡。圖1為平衡化原理圖。

圖1 平衡化原理圖
通過推導可以得出理想補償器補償電納為:
(1)

對稱分量法用于不對稱電路的研究,它將電量分解為對稱的零序、正序、負序電量。當滿足充要條件:負序電流補償為零、正序電流分量虛部補償為0時。可以保證負荷平衡化補償的實現。得到的平衡化補償公式[4]為:
(2)

2.2 基于的補償算法

針對包含正序,負序分量及各次諧波的負荷線電流,假設其瞬時值為:
(3)
式(4)中n為諧波諧波次數,對負荷三相電流進行dq變換得,In1、In2分別為正、負序n次諧波的幅值,θn1、θn2分別為n次諧波初相。

(4)
變換后得到式(5),
(5)

(6)
(7)
將式(6)代入式(7)可得
(8)
(9)
(11)
3 MATLAB仿真模型
利用MATLAB中內嵌的SIMULINK,進行補償算法及SVC控制裝置的建模仿真,其工作原理如下:首先由電源側電流和電壓計算出補償電納,然后通過查表模塊將補償電納換算為觸發角。最后將觸發角變成與電網同步的觸發脈沖用以觸發TCR。模型主要包括電源模塊、補償電納計算模塊、觸發角轉換模塊以及脈沖觸發模塊等。
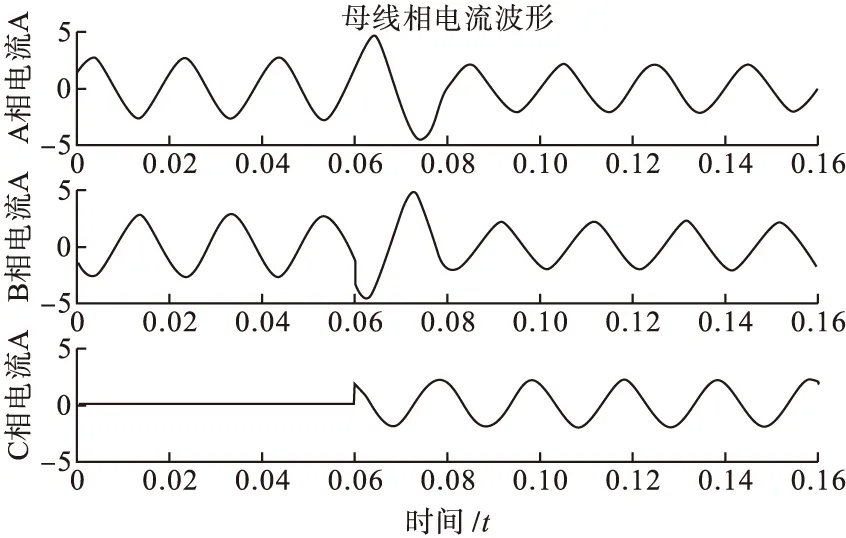
圖2 SVC投入前后母線相電流瞬時值(電阻性負載)

圖3 SVC投入前后TCR三相電流波形(電阻性負載)
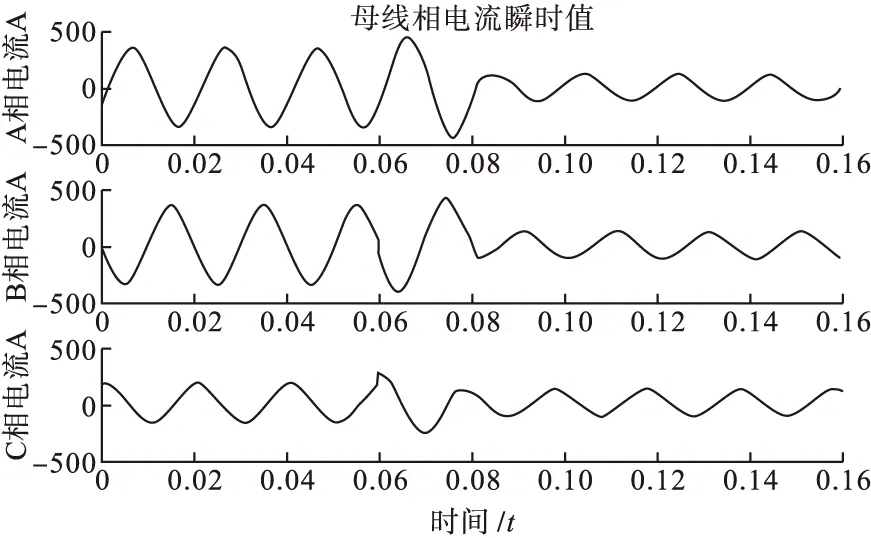
圖4 SVC投入前后母線相電流瞬時值(阻感性負載)

圖5 SVC投入前后TCR三相電流波形(阻感性負載)
仿真結果分析:分別對負載為電阻性不平衡和阻感性不平衡的情況進行仿真,在0.06s投入SVC。針對電阻性不平衡負載補償時,由圖2可以看到補償后母線三相電流幅值基本相等,不平衡度δ由補償前100%降到1.8%。針對阻感性不平衡負載補償時,補償前電流電壓明顯純在相位差,補償后母線三相電流幅值基本相等,電流電壓相位基本一致。二種情況下,SVC投入后短時間內各項波形達到穩定、功率因數都提高到0.95以上。可以得到采用基于空間矢量變換的補償算法的仿真模型能快速,準確的達到補償目的。
4 SVC硬件電路設計
硬件裝置主要包括前端模擬信號處理模塊、DSP算法處理模塊、CPLD晶閘管觸發和監控模塊、上位機顯示模塊等,如圖6所示。
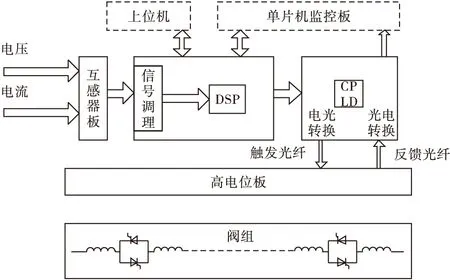
圖6 硬件電路設計
模擬信號處理模塊包括電壓電流互感器、信號調理電路、過零比較電路和A/D轉換電路等。用來提供控制所需數字量和同步電壓信號過零點。
4.1 DSP算法處理模塊
采用TI公司最新信號處理器TMS320F2812。算法處理模塊對模擬信號處理模塊采集的數字量進行計算得到補償電納,通過將其轉化為觸發角并傳遞給晶閘管觸發和監控模塊。在這里DSP只負責補償電納的計算和觸發角的轉化,大大提升了運算速度。
4.2 CPLD晶閘管觸發和監控模塊
該模塊由CPLD芯片和光電收發裝置組成。CPLD的主要功能為:對DSP計算的數據進行分析后,通過光纖發送同步觸發脈沖信號;對回報板接受的工況監測信號進行編碼處理,再傳送給DSP。CPLD具有很好的I/O口擴展功能,能夠提供的高精度的觸發脈沖信號,同時采用光纖傳輸技術,進一步提高了觸發脈沖的抗干擾能力。
4.3 上位機顯示模塊
上位機顯示模塊采用NI公司的LABVIEW軟件對人機交互界面進行設計,具有良好的操作性和可視性。能夠對三相電壓、電流、有功、無功、功率因數、觸發角度等進行顯示。

圖7 上位機顯示模塊
5 結束語
本文利用SIMULINK對基于空間矢量變換的補償算法進行仿真分析,并設計了以DSP和CPLD為核心的SVC控制裝置,能夠快速準確計算出補償電納,并進行快速補償。采用CPLD和光纖傳輸技術可以提高觸發脈沖的精度和抗干擾能力,用LABVIEW設計的人機交互界面具有良好的操作性,具有一定的實際工程應用價值。
[1] 王兆安,楊君,劉進軍.諧波抑制和無功功率補償[M].北京:機械工業出版社,2002.
[2]王兆安,張明勛主編.電力電子設備設計和應用手冊[M].2版.北京:機械工業出版社,2002.
[3]AKAGI H,KANAZAWA Y,NABAE A.Generalised Theory of the Instan-taneous Reactive Power in Three-phase Circuits[J].In:IEEE&JIEE.Pro-ceedings IPEC.Tokyo:IEEE,1983.
[4]紀飛峰,周荔丹,姚鋼,等.基于同步對稱分量法的靜止無功補償裝置[J].中國電機工程學報,2005.
[5]SCHAUDER C,GERNHARDT M,STACEY E,et al.Development of a ±100 Mvar Static Condenser for Voltage Control of Transmission Systems[J].IEEE Trans Power Delivery,1995.
Simulation and Design of TCR Controller Based on Space Vector Transformation
LIMing,HUGui-ming,WANGWei,YANGLi
(College of Electrical Engineering,Guangxi University,Nanning 530004,China)
Dynamic var compensation at load end can improve the power quality problems effectively.With the advantage of stable performance and low cost,(TCR+FC)SVC become the user′s preferred.Simulating compensation algorithm based on space vector transformation through the MATLAB in SIMULINk,on the basis of this,design an DSP chip TMS320F28335 and CPLD chip as the core of the TCR control device,in order to solve the problem that existing SVC response speed slower,and thyristor trigger pulse anti-interference is weak.
thyristor controlled reactor;static var compensator;vector transform;complex programmable logic device
1004-289X(2015)04-0081-04
TM71
B
2014-06-13