GPS干擾對反輻射無人機突防的影響分析
2015-04-24 07:41:22徐鴻羽劉湘?zhèn)?/span>郝成民
艦船電子對抗 2015年1期
徐鴻羽,劉湘?zhèn)ィ鲁擅?/p>
(電子工程學院,合肥 230037)
?
GPS干擾對反輻射無人機突防的影響分析
徐鴻羽,劉湘?zhèn)ィ鲁擅?/p>
(電子工程學院,合肥 230037)
建立了反輻射無人機初始航路模型,分析了全球定位系統(tǒng)(GPS)干擾對航路的影響機理,建立了GPS干擾條件下的航路模型和突防概率模型,對干擾前后反輻射無人機突防情況進行了實例仿真,最后提出了降低GPS干擾對反輻射無人機作戰(zhàn)影響的對策。
反輻射無人機;全球定位系統(tǒng)干擾;航路;突防;對策
0 引 言
反輻射無人機是壓制敵防空、奪取制空權和制電磁權的有力武器。新一代反輻射無人機普遍采用GPS/捷聯慣性導航系統(tǒng)(SINS)組合導航技術,其在反輻射無人機自主導航、突破敵火力攔截區(qū)、飛臨至作戰(zhàn)區(qū)域過程中發(fā)揮著重要作用。但GPS易被干擾,當GPS信號被壓制時,反輻射無人機僅依靠SINS制導飛行,由于SINS誤差不斷積累且得不到修正而導致航路精度惡化,航路會發(fā)生偏差,從而對突防產生一定影響。本文研究GPS信號被干擾,SINS導航精度不斷下降所導致的航線偏離情況對反輻射無人機突防的影響,為反輻射無人機作戰(zhàn)運用提供了有益的指導。
1 基于遺傳算法的反輻射無人機初始航路模型
1.1 威脅環(huán)境模型描述

1.2 遺傳算法生成初始航路
遺傳算法首先通過編碼生成初始種群,然后對種群個體按環(huán)境適應度進行選擇、交叉、變異,從而實現優(yōu)勝劣汰的進化過程,得到最優(yōu)解。
本次航跡規(guī)劃中,采用端點啟發(fā)式編碼方式[1],基因個數N=d/l,d是起點和目標點間的距離,l為單個航路段步長。各航路段滿足最小航路段約束及最大轉彎角約束。
適應度函數為代價函數方程:
Ffit=w1Lc+w2Fc
(1)
式中:Lc為航路代價;Fc為威脅代價;w1,w2為權重系數,且w1+w2=1。
使用輪盤賭選擇算子、均勻交叉算子以及4個實值變異算子,可生成初始航路點序列{S,R1,…,Rn-1,T},S,T分別為起點和目標點。
遺傳算法生成初始航路算法流程如圖1所示。
圖1 遺傳算法生成初始航路算法流程
2 GPS干擾條件下的航路模型
2.1 GPS干擾對航路的影響機理
SINS導航有著自主性強、短時精度高的特點,但缺點也較為明顯,即SINS陀螺存在漂移誤差,初始對準完成后,系統(tǒng)的導航精度會隨飛行時間的增加而不斷下降,而將GPS提供的位置和速度數據用于對SINS系統(tǒng)導航解的定期修正,則可大大提高SINS的精度[2]。
當GPS導航信號被壓制時,反輻射無人機僅依靠SINS獨立導航,此時SINS導航解不再被GPS導航信息修正。由于SINS系統(tǒng)誤差累積,反輻射無人機在航線上將產生一個圓概率誤差,隨著飛行時間的增加,圓概率誤差逐漸增大,最終使航線產生一定程度的偏移。偏移后的航線,即實際航線有可能失去預先規(guī)劃航線的最優(yōu)性,從而影響到反輻射無人機的突防概率。
2.2 SINS導航誤差[3-4]
若反輻射無人機飛行速度為v,受干擾航線長度為L,SINS角誤差偏移速度為σ,則在干擾壓制區(qū)內,反輻射無人機飛行方向角度偏差θ為:
(2)
反輻射無人機的圓概率誤差σCEP為:
(3)
2.3 GPS干擾條件下的實際航路
(4)
圓概率誤差定義為以目標為中心的一個圓。如果反輻射無人機到達此圓的幾率有一半,則此圓的半徑就是σCEP。一般來說,如果σCEP為n,則反輻射無人機有約50%的概率落在半徑n內,約43%的概率落在半徑n~2n的區(qū)域內,約7%的概率落在半徑2n~3n的區(qū)域內,約0.2%的概率落在半徑3n之外的區(qū)域。由于最后一種情況發(fā)生概率較小,故在本文中不考慮。
(5)

αi=2π·rand
(6)
ri可表示為:
(7)
式中:rand表示[0,1]上均勻分布的隨機數,即rand的概率密度函數為:
2.“補短”則需要“明短”。“人機互動”教學最大的困擾莫過于在互動中學生的注意力是否仍然能集中在知識學習上。互聯網信息的良莠不齊使得很多學生與網絡產生分離,這也成為學校和家長的重點防治目標。因此,“人機互動”進入“互動式課堂教學”盡管受到了很多學生的歡迎和家長的關注,要實現“人機互動”與教學目標的相融合并不容易,有效的“人機互動”學習監(jiān)控形式仍需進一步探索和完善。

(8)
向量B滿足表1所示分布律。

表1 向量B的分布律
同理,易得干擾起始時刻真實路徑點RS′坐標:
(9)
干擾終止時刻真實路徑點RT′的坐標:
(10)
(11)
假設GPS干擾終止后,反輻射無人機會飛向預設的下一路徑點。由此,可得到反輻射無人機受干擾后的路徑點序列{S,…,Rk-1,RS′,Rk′,…,Rl-1′,RT′,Rl,…,T}。
3 基于航路的突防概率模型
3.1 防空火力對反輻射無人機的毀傷概率模型
假設防空火力單元對反輻射無人機射擊采取“射擊—觀效—射擊”模式,則防空火力發(fā)射單元i對反輻射無人機毀傷概率Pi可表示為:
(12)
式中:Pf為警戒雷達發(fā)現反輻射無人機的概率;Pgi為防空火力成功制導概率;Pdi為一次射擊對目標的毀傷概率;Ci為反輻射無人機在防空火力殺傷區(qū)滯留時間Ti內,防空火力單元i的射擊次數。
(13)
式中:ti為防空火力單元i的射擊周期;mi為武器攜帶彈藥數所限定的射擊次數。
對采取單發(fā)射擊方式的地空導彈單元而言,Pdi為單發(fā)導彈的毀傷概率,mi為地空導彈單元攜帶的導彈數;對于采取“短點射”射擊方式的高炮陣地而言,mi為可實現的“短點射”次數。若陣地配有m門高炮,每門高炮帶有q發(fā)彈藥,一次可射n發(fā),則mi可表示為:
mi=q/n
(14)
一次“短點射”對反輻射無人機的毀傷概率Pdi可表示為:
(15)
式中:P0/k為單發(fā)炮彈k對反輻射無人機的殺傷概率。
假設炮彈采用觸發(fā)式引信彈頭,則單發(fā)炮彈對反輻射無人機的射殺概率P0可表示為[5]:
(16)
式中:Av為反輻射無人機易損面積;σx,σy為高炮命中目標的標準差;μx,μy為彈著點偏差均值;x0,y0為反輻射無人機易損面積的等效邊長。
3.2 反輻射無人機突防概率模型
反輻射無人機突破W個地空導彈陣地的概率P1為:
(17)
式中:Pj為地空導彈單元j對反輻射無人機的毀傷概率。
反輻射無人機突破M個高炮陣地的概率P2為:
(18)
式中:Pk為高炮陣地k對反輻射無人機的毀傷概率。
則反輻射無人機突破防空火力區(qū)概率P為:
P=P1·P2
(19)
4 實例仿真
4.1 情況設置
(1) 相關參量設置
假設防空高炮采用觸發(fā)引信式炮彈,彈著點偏差均值μx=μy=6 m,標準差σx=σy=3 m,反輻射無人機易損面積Av=x0y0=2 m2,飛行速度為70 m/s。
(2) 防空威脅區(qū)設置
本次情況設置在400 km×400 km的區(qū)間內,為處理方便,本文用平面坐標代替經緯度坐標。反輻射無人機由發(fā)射陣地(4 km,9 km)起飛,途經敵地空導彈和高炮威脅區(qū),飛向目標警戒雷達W1(280km,270km)所在區(qū)域,設警戒雷達對反輻射無人機的發(fā)現概率為0.7;防空威脅區(qū)采取分散和嚴密2種配置方式,各火力單元的配置坐標及火力殺傷半徑等相關參數設置如表2。
表2 防空威脅區(qū)配置表
4.2 仿真及結果分析
(1) 不同角誤差偏移速度下的SINS導航精度隨導航距離的變化
反輻射無人機SINS導航精度與導航距離的關系如圖2所示。
圖2 反輻射無人機SINS導航精度與導航距離關系圖
(2) 干擾GPS對反輻射無人機突防的影響仿真
仿真采用Matlab7.8仿真平臺,在用遺傳算法生成初始航路時,取初始種群數為50,迭代次數為250,交叉概率為0.8,變異概率為0.3,威脅區(qū)配置按照表2中的參數設置,得到圖3~圖5。
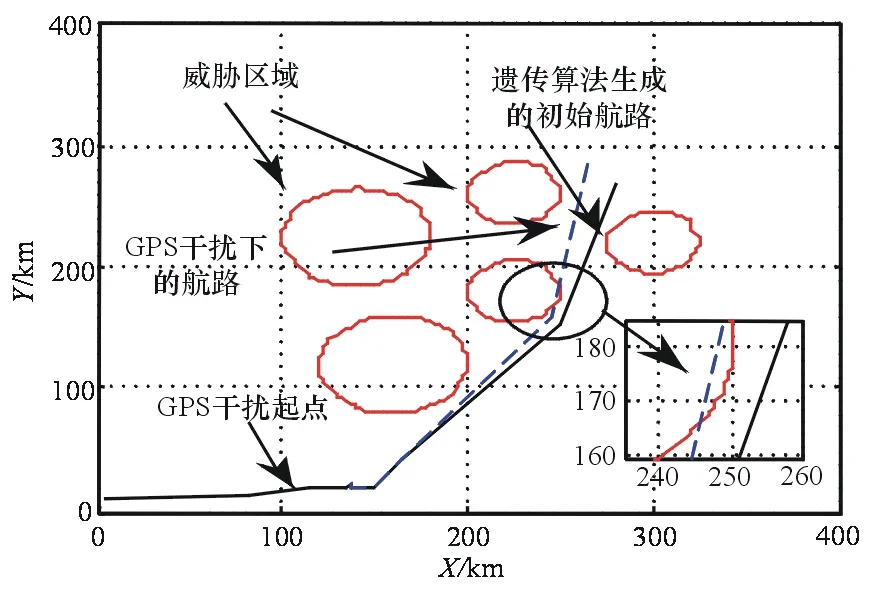
圖4 干擾前后的反輻射無人機航路Ⅱ防空火力區(qū)分散配置圖(σ=2°/h)
(3) 仿真數據記錄
結果分析:
(1) 由圖2中仿真的結果可以看出,隨著慣導導航距離的增長,反輻射無人機航路的圓概率誤差將逐漸增大,且呈距離的平方關系變化;另外,角誤差偏移速度值對反輻射無人機導航精度的影響也十分顯著。故當反輻射無人機慣導固有角誤差偏移速度較大,飛行較遠距離時,反輻射無人機的航路將存在一個較大的圓概率誤差,航線很可能偏離預設航路及預設目標。
(2) 結合表3中的數據,分析圖3可知,當反輻射無人機GPS受干擾時長較短、角誤差偏移速度較小時,其航路偏移程度較小,干擾前后的突防概率未受影響,均為1,反輻射無人機仍可成功突防并飛至目標區(qū)域上空,對目標輻射源進行搜索、跟蹤,完成后續(xù)作戰(zhàn)任務;相比于圖3情況,圖4中反輻射無人機受干擾時長較長,角誤差偏移速度也較大,航路受干擾后產生了很大程度的偏移,偏移后的航線喪失了原有航路的最優(yōu)性,不僅突防概率由1降至0.787 1,而且最終偏離目標區(qū)域較遠距離,突防后成功搜索、跟蹤到目標輻射源的難度加大,有可能導致任務失敗。

表3 干擾GPS對反輻射無人機突防的影響仿真數據記錄
圖5為穿越嚴密配置的防空火力區(qū),情況與圖4類似,即航路喪失最優(yōu)性,偏離目標區(qū)域較遠,后續(xù)任務可能會失敗。
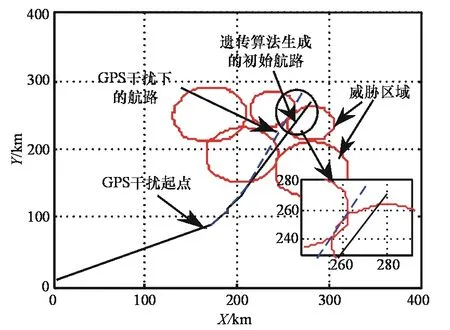
圖5 干擾前后的反輻射無人機航路Ⅲ防空火力區(qū)嚴密配置圖(σ=2°/h)
根據上述仿真分析,可知較小的角誤差偏移速度以及不間斷GPS信號對SINS導航誤差的修正是保證反輻射無人機航路精度的重要因素。若GPS信號長時間受到壓制,而不能及時對SINS導航誤差進行修正,航路的圓概率誤差會逐漸增大,進而影響到反輻射無人機的突防及后續(xù)作戰(zhàn)行動。故研究降低GPS干擾對反輻射無人機作戰(zhàn)行動影響的對策,也可從誤差修正和SINS角誤差偏移速度2個角度加以考慮,可以得出以下結論:
(1) 避開GPS干擾區(qū)。GPS干擾是造成SINS導航誤差得不到修正的原因,故在生成初始航路時就將GPS干擾作為一種電子威脅加以描述,重新構造代價函數,考慮GPS干擾對航路的影響,則可生成一條繞過GPS干擾區(qū)的優(yōu)化航路。
(2) 采取多種導航結合的方式,提高長時導航能力。例如采取地形匹配、地磁與SINS組合導航的形式,即使在GPS導航不起作用時也能保證航路有較高精度。
(3) 提高SINS精度。慣導的突出特點是自主性強,不受光、電、磁的影響,提高SINS的精度可保證即使短時間內GPS信號丟失,SINS導航誤差得不到修正,反輻射無人機航路也不會產生太大偏移。
5 結束語
GPS/SINS系統(tǒng)對反輻射無人機實現精準導航有著重要作用。GPS信號被干擾時,SINS導航解得不到修正,在積累誤差的作用下航路會發(fā)生偏移,偏移程度與GPS受連續(xù)壓制時長和SINS角誤差偏移速度有關;當出現較大偏移時,原航路的最優(yōu)性將喪失,有可能會導致突防概率的降低,以及航線偏離預設目標區(qū)域,以至于反輻射無人機難以搜索、跟蹤到目標輻射源信息,喪失完成攻擊任務的條件。所以反輻射無人機在進行航路規(guī)劃時應該盡量規(guī)避干擾區(qū),或在設計上使用更高精度的慣導系統(tǒng),以確保完成作戰(zhàn)任務。
[1] 嚴建林.基于進化算法無人機航路規(guī)劃技術研究[D].南京:航空航天大學,2008.
[2] 張宗麟.慣性導航與組合導航[M].北京:航空工業(yè)出版社,2000.
[3] 任菁圃,吳衛(wèi)凱.GPS電子干擾范圍及效果分析[J].現代電子技術,2006(3):19-21.
[4] 吳志建,方勝良,吳付祥.高空無人機載GPS/INS系統(tǒng)干擾效能及對策研究[J].航天電子對抗,2013,29(2):16-19.
[5] 王征,王勇,李望西.復雜對抗條件下反輻射無人機作戰(zhàn)效能分析[J].火力與指揮控制,2009,34(S0):138- 140.
Effect Analysis of GPS Jamming on Anti-radiation UAV Penetration
XU Hong-yu,LIU Xiang-wei,HAO Cheng-min
(Electronic Engineering Institute,Hefei 230037,China)
This paper sets up the initial flight path model of anti-radiation unmanned aerial vehicle (UAV),analyzes the effect mechanism of global positioning system (GPS) jamming on flight path,builds up the flight path model and penetration probability model under the GPS jamming condition,performs the penetration instance simulation of anti-radiation UAV before and after jamming,finally puts forward the countermeasures to reduce the influence of GPS jamming on anti-radiation UAV campaign.
anti-radiation unmanned aerial vehicle;global positioning system jamming;flight path;penetration;countermeasure
2014-08-22
E926.3
A
CN32-1413(2015)01-0093-05
10.16426/j.cnki.jcdzdk.2015.01.022