挖掘機(jī)回轉(zhuǎn)減速機(jī)運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)仿真
2015-04-29 23:58:13張凡凡羅艷蕾
中國機(jī)械 2015年10期
張凡凡 羅艷蕾


摘?要:以某挖掘機(jī)回轉(zhuǎn)減速機(jī)為研究對象,通過UG建立減速機(jī)的三維模型,將模型導(dǎo)入到ADAMS中建立減速機(jī)的虛擬樣機(jī),再對虛擬樣機(jī)進(jìn)行運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)仿真,得到各級轉(zhuǎn)速、齒輪嚙合力等曲線。將仿真結(jié)果與理論計(jì)算進(jìn)行對比,證明虛擬樣機(jī)建立正確,也為減速機(jī)動(dòng)態(tài)特性優(yōu)化提供一定的指導(dǎo)。
關(guān)鍵詞:UG;行星減速;ADAMS;動(dòng)力學(xué)仿真
引言
行星減速機(jī)具有結(jié)構(gòu)緊湊、傳遞速度范圍大、運(yùn)行平穩(wěn)等優(yōu)點(diǎn),被廣泛地應(yīng)用于建筑、冶金等領(lǐng)域。由于其結(jié)構(gòu)相對復(fù)雜,使用傳統(tǒng)方法不易對其動(dòng)力學(xué)特性進(jìn)行精確計(jì)算,也無法準(zhǔn)確預(yù)測其工作性能。本文在ADAMS中建立虛擬樣機(jī),可得到所需的各種數(shù)據(jù)曲線。為零件的強(qiáng)度校核、壽命預(yù)測和工程設(shè)計(jì)等提供支持。
1.行星減速機(jī)的工作原理
本文研究的行星減速機(jī)采用2級行星輪系組成,每一級結(jié)構(gòu)都采用NGW型傳動(dòng)。如圖1是此行星減速機(jī)的傳動(dòng)結(jié)構(gòu)簡圖。
此減速機(jī)屬于周轉(zhuǎn)輪系[1],由于內(nèi)齒圈
固定不動(dòng),所以=0(m,n,H分別代表太陽輪、內(nèi)齒圈、行星架),所以減速比:
即:
得出n級NGW型的減速比
各級太陽輪齒數(shù)各級內(nèi)齒圈齒數(shù)
圖1.二級行星減速機(jī)結(jié)構(gòu)簡圖
1.一級太陽輪?2.一級行星輪3.一級行星架
4.二級太陽輪?5.二級行星輪6.二級行星架
7.內(nèi)齒圈
本文的減速機(jī)一級太陽輪、一級行星輪、內(nèi)齒圈、二級太陽輪、二級行星輪的齒數(shù)分別為:21、33、87、21、23。所以總減速比為(1+87/21)2=26.45。
2.減速機(jī)三維模型的建立
由于ADAMS不善用于復(fù)雜3D曲面的三維建模,所以采用UG來建立三維模型。
2.1齒輪和花鍵的參數(shù)化建模[2]
變位齒輪用傳統(tǒng)的建模方法可能建模失敗,因此采用參數(shù)化建模齒輪和花鍵。在UG工具菜單的表達(dá)式命令中輸入齒輪的漸開線方程,然后在“插入”下拉菜單中的“規(guī)律曲線”下“通過方程”生成具體的漸開線,再鏡像此漸開線,隨后作出該齒輪的齒頂圓和齒根圓,最后進(jìn)修修剪、拉伸圓形陣列等操作即可完成齒輪三位建模。
圖2.產(chǎn)生的漸開線和一個(gè)齒輪
2.2其它零部件的三維建模
其它零件采用傳統(tǒng)的建模方法。即在UG中“插入”→“草圖”→“拉伸/旋轉(zhuǎn)/掃掠/布爾運(yùn)算”等步驟來完成零部件的建摸。
2.3行星減速機(jī)的虛擬裝配
模型裝配可以按照實(shí)際的物理裝配順序進(jìn)行裝配,運(yùn)用適當(dāng)?shù)募s束關(guān)系使最后的總裝配體符合實(shí)際的物理樣機(jī)。
圖3.減速機(jī)的總裝配體
3.行星減速機(jī)虛擬樣機(jī)的建立
3.1模型導(dǎo)入到ADAMS中
將UG中的模型導(dǎo)出為Parasolid中的.xt格式,然后才能導(dǎo)入到ADAMS中。
3.2在ADAMS中材料屬性的定義
導(dǎo)入ADAMS后首先定義零件的材料屬性。太陽輪和行星輪為20GrMnMo,內(nèi)齒圈和行星架為40Gr。20GrMnMo/40Gr對應(yīng)的泊松比、楊氏模量、密度屬性分別為0.3/0.28、207GPa、7800/7100?kg/m3。
3.3在ADAMS中添加約束
在ADAMS中給各個(gè)零件添加相應(yīng)的旋轉(zhuǎn)副、固定副等約束。
3.4在ADAMS中的嚙合齒輪之間定義接觸
本文將要定義13個(gè)接觸,只要是相互嚙合的齒輪對之間,不論是內(nèi)嚙合或外嚙合,都定義一個(gè)接觸。
3.5在ADAMS中接觸力的選擇和定義
ADAMS中選用沖擊函數(shù)法計(jì)算接觸力,接觸力由相互切入產(chǎn)生的彈性力和相對速度產(chǎn)生的阻尼力組成[3]。沖擊函數(shù)等于
(1)
其中—兩個(gè)物體的實(shí)際距離;—兩個(gè)物體的參考距離;—接觸剛度;—指數(shù)—阻尼。所以用沖擊函數(shù)法,需要確定指數(shù)、切入深度、接觸剛度和阻尼。
3.6在ADAMS中接觸力的相關(guān)參數(shù)確定[4]
指數(shù):對于金屬材料,e的取值為1.3到1.5,故e=1.5。
切入深度:通常情況下,在沒有指定穿透深度時(shí),應(yīng)盡量取較小值,本文取穿透深度x=0.01mm。
接觸剛度(Stiffness?):取決撞擊物體的材料和結(jié)構(gòu)形狀。根據(jù)Hertz靜力彈性接觸理論:,由此式得到碰撞時(shí)法相接觸力和變形的關(guān)系為:。剛度系數(shù)=?,其中=,=,而為材料的彈性模量,和為材料的泊松比,和為物體在接觸點(diǎn)的接觸半徑,由于齒輪的齒高和分度圓半徑變動(dòng)范圍不大,可用分度圓半徑來替代[3]。由參考文獻(xiàn)5,剛度系數(shù),由參考文獻(xiàn)6知:
圖表4.嚙合剛度系數(shù)值
阻尼:阻尼系數(shù)的值正常取剛度系數(shù)的1/1000-1/100倍之間,因此取=1000。
滑動(dòng)摩擦力計(jì)算方法選庫倫法,設(shè)置靜態(tài)系數(shù)=0.08、動(dòng)態(tài)系數(shù)=0.05。
4.行星減速機(jī)的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)仿真
進(jìn)行仿真運(yùn)行前,還需添加運(yùn)動(dòng)激勵(lì)和負(fù)載轉(zhuǎn)矩,及設(shè)置仿真運(yùn)行參數(shù)。
4.1在ADAMS中添加運(yùn)動(dòng)激勵(lì)及負(fù)載轉(zhuǎn)矩
為了運(yùn)動(dòng)時(shí),速度不產(chǎn)生較大突變,采用Step函數(shù)。Step(time,0,0,0.2,9828d)使角速度在0.2秒內(nèi)從0增加到9828度/秒。
在輸出軸上施加-4000Nm的力矩,同樣定義step(time,0,0,0.2,-4000000)。
4.2設(shè)置仿真時(shí)間、步長及積分格式
設(shè)置仿真時(shí)間2秒,步長0.0001。采用GSTIFF積分器下SI2積分格式替代默認(rèn)的I3積分格式。
圖5.ADAMS中搭建的虛擬樣機(jī)
4.3減速比驗(yàn)證
圖6.一級太陽輪、行星架和二級行星架的角速度
如圖6,一級太陽輪的角速度是在0到0.2秒內(nèi)逐漸增加到9828度/秒,然后保持勻速。一級行星架的角速度在1910度/秒上下波動(dòng)。二級行星架370度/秒上下波動(dòng)。與理論值比較驗(yàn)證了虛擬樣機(jī)的正確性。
4.4同級行星輪的接觸力的對比
圖7.三個(gè)二級行星輪與內(nèi)齒圈的接觸合力放大圖
如圖7,三個(gè)二級行星輪與內(nèi)齒圈的三個(gè)接觸力都在15000N左右波動(dòng),三個(gè)力的波動(dòng)范圍略有差別,但差別不大,表明均載狀況良好。
4.5齒輪接觸力分析
圖8.一級太陽輪與某一同級行星輪在X、Y和Z方向的接觸力
由于是直齒輪傳動(dòng),所以X和Y方向有接觸力,Z方向沒有接觸力。由于行星傳動(dòng)是非定軸傳動(dòng),行星齒輪不但繞行星軸自轉(zhuǎn),也隨著行星架公轉(zhuǎn),因此,X和Y方向嚙合力呈諧波性(如圖8)。
圖9.一級太陽輪與一級行星輪的接觸合力
圖10.一級行星輪與內(nèi)齒圈的接觸合力
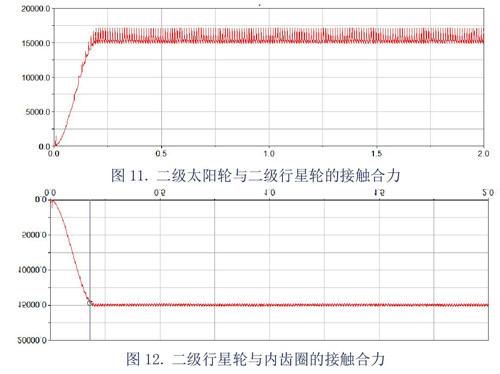
圖11.二級太陽輪與二級行星輪的接觸合力
圖12.二級行星輪與內(nèi)齒圈的接觸合力
理論上同級的每個(gè)太陽輪和行星輪、行星輪和內(nèi)齒圈的法相接觸力應(yīng)相等,均為:,T為轉(zhuǎn)矩,N為同級的行星輪個(gè)數(shù),i為本級的減速比,R為太陽輪分度圓半徑。
如圖9、10、11和12,每一級太陽輪與行星輪的嚙合力略大于行星輪與內(nèi)齒圈的接觸力。考慮到偏載和摩擦力的存在,此情形與實(shí)際相符。高速速級齒輪間的接觸力波動(dòng)幅值較大,而對應(yīng)的低速級齒輪間的接觸力波動(dòng)幅值較小,這說明構(gòu)件轉(zhuǎn)速在低速下,有利于減小工作時(shí)的動(dòng)載荷。
結(jié)論:
(1)漸開線齒輪動(dòng)態(tài)嚙合力的仿真分析方法可準(zhǔn)確的計(jì)算齒輪傳動(dòng)的動(dòng)態(tài)接觸力。
(2)仿真結(jié)果表明:齒輪傳動(dòng)的速度越大,動(dòng)載荷越大。
參考文獻(xiàn):
[1]孫恒,陳作模,葛文杰.機(jī)械原理[M]?北京:高等教育出版社,2006年5月
[2]麓山科技.UG?NX8中文版零件設(shè)計(jì)實(shí)例精講[D].機(jī)械工業(yè)出版社,2012年4月
[3]李增剛.ADAMS入門詳解與實(shí)例[M].北京:國防工業(yè)出版社,2006年4月
[4]漸開線齒輪嚙合碰撞力仿真[?J?].?中南大學(xué)學(xué)報(bào),2011,?42?(2)?:?379?-?383.
[5]姜振波.機(jī)器人用RV減速器動(dòng)力學(xué)性能分析[D].大連交通大學(xué),2010年12月
[6]何衛(wèi)東,李力行,李軍.機(jī)器人用RV傳動(dòng)中擺線輪受力分析[J].大連鐵道學(xué)院學(xué)報(bào),1999年6月?第20卷?第2期:50-53
項(xiàng)目基金:國家科技支撐計(jì)劃(2013BAF07B01)
作者簡介:張凡凡(1989—),男,漢族,江蘇響水人,碩士,主要從事液壓傳動(dòng)與控制方面的研究。