船舶水下外形實時自動測量系統研究與應用
2015-05-06 09:12:26陳明輝
江蘇船舶 2015年2期
陳明輝
(京杭運河江蘇省交通運輸廳蘇北航務管理處,江蘇淮安223002)
0 引言
我國京杭大運河蘇北段全長404 km流域內建有28座大型船閘,這些船閘每天承擔著數以百計的船只通行任務。面對如此巨大的工作量,實現高效、自動、快速的過閘船舶外形自動化測量技術來代替原有的人工測量方式,為工作人員實時地提供船舶的長度、寬度、吃水深度以及干舷高度等數據,從而提高船閘的服務效率和保障船閘運行安全,對我國水路運輸事業的發展具有重大意義。
對于水上航行的船舶,由于測量條件的不同,水下部分外形的量測與水上部分外形的量測在手段和方法上有所不同,難度更大。此外,經檢索和查新沒有發現國外有關船舶水下部分外形測量系統的正式文獻和報道,無法借鑒和參考國外的有關資料。本文將介紹1套利用多波束與單波束技術相結合,從而得到船舶水下部分外形的測量系統。
1 基于水聲測距測量水下點位位置的原理
水聲測深儀換能器向待測點所在位置發射某一頻率的聲波信號,聲波在水中以1 500 m/s左右的速度傳播。當聲波到達該點時,部分聲波的能量反射回來。當反射聲波到達換能器表面時,換能器將聲波信號轉換成電波信號,通過信號放大和數據處理,將信號轉換為待測點到換能器之間的直線距離。根據換能器的指向性可確定該點的坐標。
水聲測深儀的聲波發射端為一寬波束角(大于60°)換能器,接收端為一窄波束角換能器,僅接收波束角內的回波,可近似為垂直于接收換能器面的中心線。聲學測距原理圖如圖1所示。
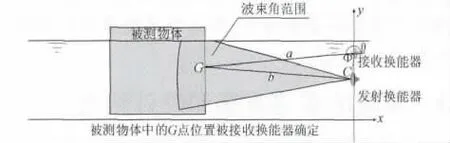
圖1 聲學測距原理圖
發射換能器在其波束角范圍內“照亮”被測物體,其中聲波沿線b傳播到被測物體,經G點的反射沿線a方向(垂直于接收換能器面的中心線)傳播到接收換能器。可測得聲波經發射換能器到G點與被其反射到接收換能器的聲波傳播時間t有以下關系:

式中:v為聲波在水中傳播速度。
由換能器的安裝位置可測得發射、接收換能器之間的距離c,以及夾角Φ,根據三角形幾何關系有以下方程:

解算出:

相對于圖1定義的坐標系,θ為換能器與水平方向夾角,最終得到G(x,y)點坐標位置:

式中:x1、y1為換能器1的坐標位置。
如布置更多接收換能器,可得到被測物體外部形狀不同點的位置:

2 系統的設計思想和研究思路
水聲測深儀主要有單波束測深儀和多波束測深儀。目前商用的單波束測量系統和多波束測量系統主要是針對水下測深或水下地形測量,無法直接應用測量船舶水下部分。單波束系統在船形測量中主要問題是測量速度慢,對運動中的船舶進行截面外形測量時,無法獲得足夠多的采樣點;多波束系統的測量范圍無法覆蓋船舶水下部分,并且價格昂貴,將大大增加儀器成本。因此,為了同時測量船底和船側面外形數據,并且考慮到測量系統的安裝不能影響船舶的通行,船舶運動對測量精度產生的影響以及儀器的成本等問題,單波束系統和多波束系統并不適用于單獨對船舶水下部分進行測量。
經過多次實驗,研究人員最終決定采用單波束、多波束綜合測量系統。單波束系統主要測量船舶底部外形及船舶吃水深度,多波束系統測量船舶側面外形及水下寬度。
3 系統的實施方案和硬件組成
3.1 單波束測量系統
單波束傳感器陣在河道測量斷面一字排開,間距2 m,共布設6套,垂直向上測量通過船只的底部,采用循環掃描的測量方式。由于傳感器數量少,測得船舶斷面的邊界不確定性可忽略。
船舶的底部外形一般比較平坦,因此對于船舶的底部外形測量,可以通過測量到的幾點關鍵數據來近似推算出整個船底外形。船舶底部外形測量點位置按以下公式確定:

式中:Xn為換能器在測量截面的X方向坐標;Yn為換能器到船舶的測量距離。
3.2 多波束測量系統
船舶水下側面外形采用多波束測量方式。多波束測量陣由1只寬波束發射換能器和12只接收換能器組成。根據水下聲納多波束測量的結果,完成對船舶側面的外形測量。
3.3 船舶水下外形測量系統的硬件組成
測量系統由多波束測量系統及單波束測量系統組成,其硬件主要有:1臺多波束主控制器、1套PXI板卡機箱、1套信號發生器、2套8通道信號處理板卡、1套I/O控制器、1套功率放大器、1套寬波束高功率發射換能器、12套接收換能器、1套電氣機柜、1套多波束換能器安裝支架、1套姿態儀、1套高壓水系統、1套單波束控制器、1套單波束信號轉換控制器、7套單波束收發換能器。
4 船舶水下外形測量系統的誤差分析
4.1 多波束測量系統的誤差分析
(1)接收換能器的波束角(指向性)帶來的測量誤差
在本系統內接收換能器的波束角為3°。在接收換能器的波束角內的較強發射被記錄為波束角中心線方向的測量距離a。
據現場換能器陣安裝的相對位置,Φ為90°。由于波束角為3°,a值實際長度在如下范圍內:

式中:c為接收換能器到發射換能器的距離。
a的最大誤差約為15 mm。
(2)時間采樣帶來的測量誤差
本裝置信號采集器測時精度為10-6s,按聲速1 500 m/s計算,帶來的測量誤差為0.15 mm;軟件計算帶來誤差約為15 mm,聲速可按聲速計測得,系統總體誤差可控制在30 mm內。
4.2 單波束測量系統的誤差分析
本系統采用美國FFT測深儀作為船舶吃水深度的測量儀器,其測量精度為70 mm。
在本方案中采用測深儀垂直向上測量來確定船舶吃水深度及船底外形,因此,換能器的安裝精度直接影響系統測量精度。
換能器事先固定在水泥基礎上,由水準儀檢測其安裝水平度,確保6只換能器在同一水平線上。
水泥基礎上安裝姿態傳感器,在安放橫梁過程中實時監測橫梁姿態。本次安裝橫梁的左右橫滾角度為0.635°,前后俯仰角為0.237°,安裝帶來的測量誤差為6 mm。單波束測量精度為70 mm。該裝置總體測量誤差小于80 mm。
5 系統的實驗驗證
根據圖1及式(6)、式(7)可知,各點位的精度取決于所測得的反射點G到接收換能器之間的距離值a的精度。為了驗證船舶水下部分外形測量系統的可行性,項目組就系統對該距離值的測量進行了實驗。
5.1 實驗過程
項目組在京杭運河淮安2號船閘處進行了實驗。本次實驗采用的是NI-PXI綜合測試儀。通過測量發射換能器及接收換能器的實時信號數據,記錄發射聲波及回波的波形,得到測量波形1~波形10。本文以波形10、波形4進行分析。波形10、波形4測量到對岸距離分別如圖2、圖3所示。
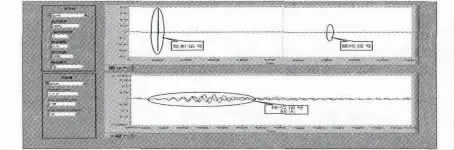
圖2 波形10測量到對岸距離
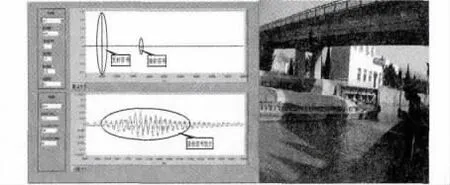
圖3 波形4測量到船舶距離
5.2 實驗結果
根據實驗數據波形10,換能器回波信號有兩種不同的信號。實驗中,兩接收換能器同步接收到回波信號。因安裝位置及發射角度關系,二者存在相位差,證明多波束測量技術方案是可行的。
記錄發射及接收換能器的波峰時刻,計算出時間差、聲波傳播距離及接收端到被測物體的距離。波形10發射信號、接收信號處理分別如圖4、圖5所示。
根據波形10實驗數據,推算出接收端到對面河岸的距離約為30 m,與實際尺寸大致相等。
波形4發射信號、接收信號處理分別如圖6、圖7所示。
波形4在船舶通過時測量到船舶距離約為12.5 m,根據實驗波形圖可見船舶的運動未對測量系統帶來大的影響,可清晰區分出回波信號。
6 結語
本文介紹了一種實時自動的船舶水下部分形狀測量系統,該系統基于單波束與多波束測距技術,可得到船舶水下部分的外形、寬度以及吃水深度。船舶水下部分形狀測量系統通過試驗驗證,該系統穩定性較好,精度較高。
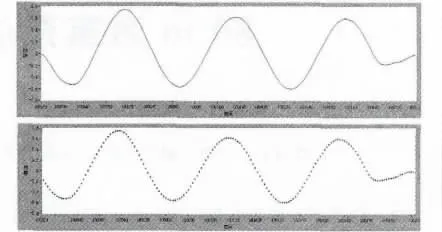
圖4 波形10發射信號處理
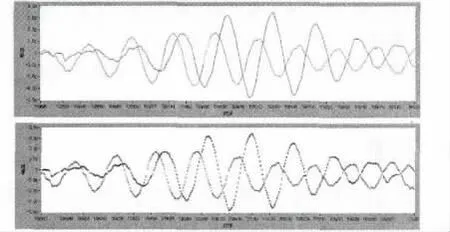
圖5 波形10接收信號處理
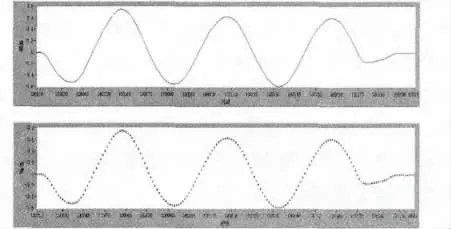
圖6 波形4發射信號處理
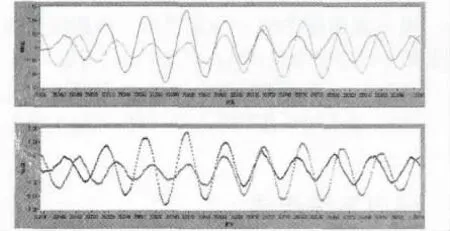
圖7 波形4接收信號處理
[1] 張玥,陸英.基于巨磁阻傳感器的無線船舶航向自動測量系統研究[J].上海船舶運輸科學研究所學報,2014(3):15-18.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21