常規與網絡實時動態差分的比較與分析
2015-05-06 02:33:47韋延忠
導航定位學報 2015年1期
韋延忠
(中國鐵建十一局集團建筑安裝工程有限公司,湖北 襄陽 441057)
常規與網絡實時動態差分的比較與分析
韋延忠
(中國鐵建十一局集團建筑安裝工程有限公司,湖北 襄陽 441057)
隨著全球衛星導航定位技術的快速發展,實時動態差分技術已在厘米級精度要求的測量與放樣工程中表現出其無可比擬的優勢。從載波相位差分定位原理出發,詳細地解析了常規實時動態差分、常規實時動態分法任意基準站的工作原理,在此基礎上,介紹了網絡實時動態差分的工作原理,并比較、分析了常規與網絡實時動態差分工作原理的異同之處與相互聯系。從應用的角度考慮,給出了常規實時動態差分、常規實時動態差分任意基準站以及網絡實時動態差分的作業流程,比較分析了各種方法的作業流程異同點,并通過實例數據說明了各種作業流程的正確性。
全球衛星導航系統;實時動態差分法;任意基準站;網絡實時動態差分法
1 引言
全球衛星導航系統(global navigation satellite system,GNSS)為測繪行業帶來了革命性的變化,尤其是我國北斗衛星導航系統(BeiDou navigation satellite system,BDS)的建成與運營,將進一步深化測繪行業的技術變革[1]。相對于傳統的測圖、放樣、勘測方法,實時動態差分(real-time kinematic,RTK)具有效率高、勞動強度低、操作簡單等優勢,已廣泛應用于許多cm級精度要求的工程中。
在最初的RTK應用中,必須有一臺接收機安置在已知點上作為基準站,但在實際應用中,由于工程區域缺乏已知點或已知點上不便于設置基準站,通常采用任意點上設置基準站,然后通過點校正的方法配置坐標參數。把用戶自己需要配置基準站的方法稱為常規RTK技術。隨著通信技術和常規RTK技術的進一步發展,從資源共享和拓展常規RTK的作業范圍的角度出發,出現了網絡RTK技術。網絡RTK技術是基于連續運行參考站系統(continuous operational reference system,CORS)的網絡實時動態定位系統,用戶無需配置基準站[2]。
對于很多RTK使用者,尤其是初學者,還存在對常規RTK、常規RTK任意基準站法、網絡RTK認識不清的問題,本文從工作原理、作業流程方面詳細地解析、闡述和比較各種RTK,從原理上解答RTK使用者的疑惑,從應用角度幫助使用者會用各種RTK技術進行測量、放樣、勘測等工作。
2 工作原理比較與分析
常規RTK和網絡RTK的基本工作原理都是載波相位差分定位原理。在衛星導航定位中,由于星歷誤差、衛星鐘差、電離層及對流層等誤差的存在,導致單點絕對定位的精度較低。當兩測站相距較近時(一般小于30 km),認為兩測站所受到上述誤差具有很強的時空相關性,通過求差的方法可消除或消弱相關的誤差,從而得到兩測站間高精度的基線向量,這就是載波相位差分定位的基本原理。
2.1 常規RTK工作原理
常規RTK的最初基本思想是:在基準站上安置一臺GNSS接收機,對衛星進行連續觀測,并通過無線電傳輸設備實時地將觀測數據及基準站坐標信息傳送給流動站;流動站一方面通過接收機接收GNSS衛星信號,同時還通過無線電接收設備接收基準站傳送的觀測數據,然后根據相對定位原理,實時地進行處理數據,并實時地以厘米級的精度給出流動站的三維坐標[2]。從常規RTK的工作原理可見,基準站一般要設置在坐標已知的點上,且對天觀測條件較好[3]。如圖1所示,圖中Sj(j=1,2,3,…6)表示可觀測衛星的編號,當用戶流動站相對于基準站的基線向量lik求得,用戶流動站的坐標就可表述為
(1)
式(1)中,[xkykzk]T為用戶流動站的坐標;[xiyizi]T為基準站的坐標;[ΔxikΔyikΔzik]T為基準站至流動站的基線向量lik。
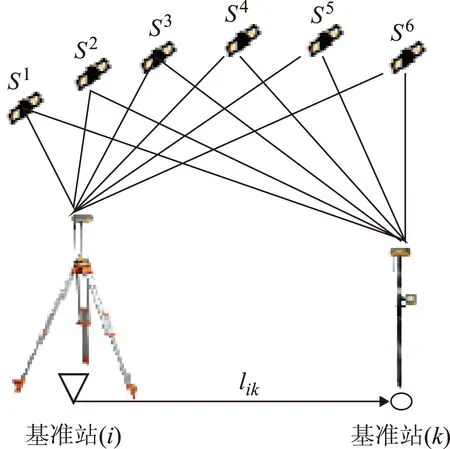
圖1 常規RTK工作原理圖
2.2 常規RTK任意基準站法工作原理解析
在測區缺少已知點或已知點上對天觀測條件較差時,常常將基準站設在對天觀測條件較好的任意點處。那么,常規RTK任意基準站法能否與上述傳統的常規RTK一樣滿足用戶所要求的高精度測量任務呢?不管何種RTK,首先其屬于GNSS載波相位相對定位。通過GNSS載波相位相對定位,可得到兩測站間高精度的基線向量,該基線向量類似于導線測量所得到的坐標增量。那么,在獲得高精度的基線向量的基礎上,用戶只要給出測量基線中,某一基線的一個已知點坐標作為起算數據,在設置好坐標系轉換參數后,就可得到其他流動站的坐標。如圖2所示,圖2中Sj(j=1,2,3,…6)表示可觀測衛星的編號。
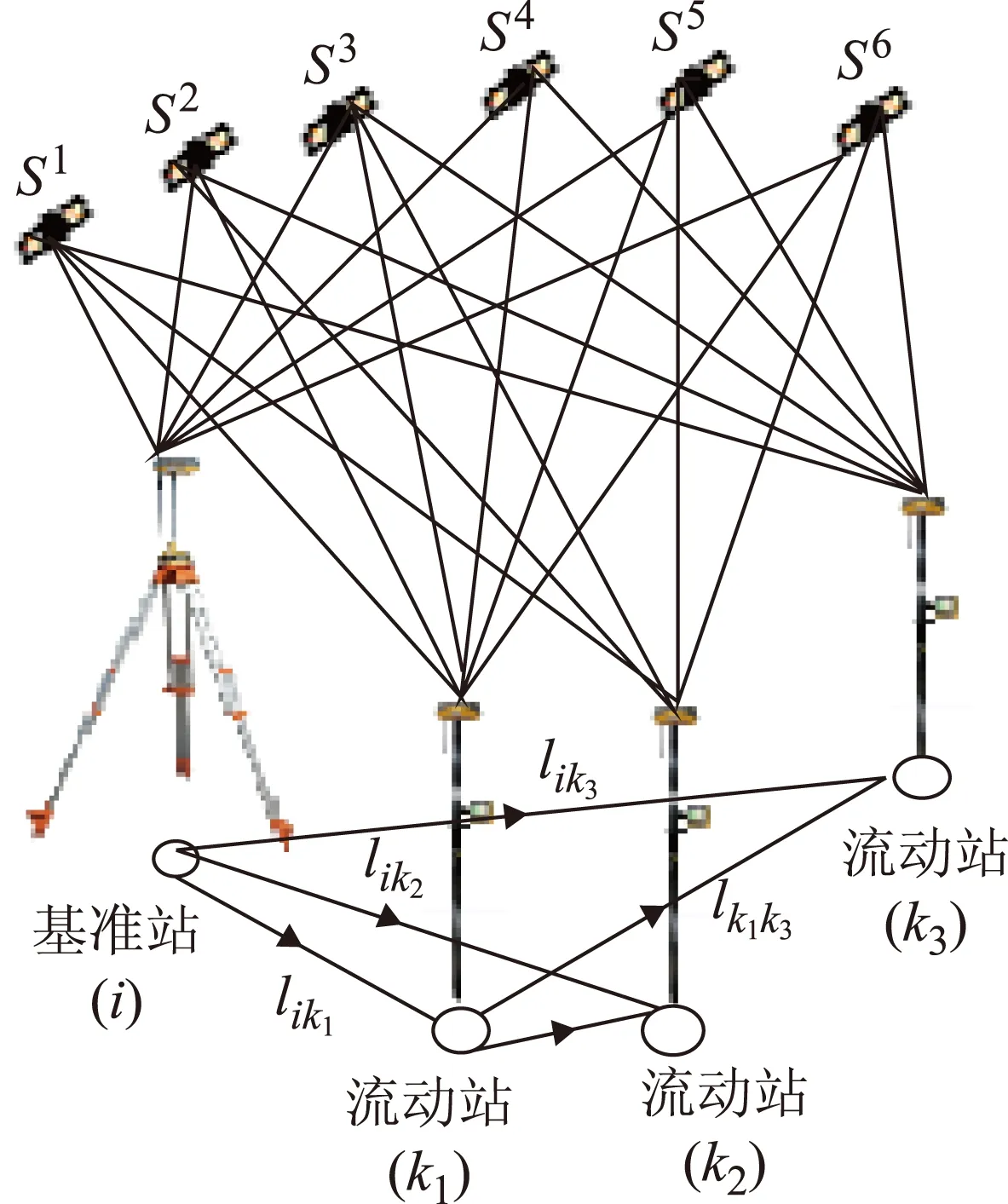
圖2 常規RTK任意基準站法工作原理圖
當基準站i向外播發接收的衛星觀測數據,流動站k1、k2、k3接收后,通過載波相位求差模型,可獲得高精度的基線向量lik1、lik2、lik3。此時,若用戶坐標系內k1點的坐標已知,由空間幾何向量關系可得
lk1k2=lik2-lik1
(2)
lk1k3=lik3-lik1
(3)
求解出基線向量lk1k2、lk1k3后,根據式(1)的方法,可求得k2、k3點的精確坐標。若有n個流動站,則可依次類推得到其相應點的精確坐標。
從以上的解析可見,常規RTK任意基準站法是常規RTK的推廣,二者工作原理的本質是相同的。
2.3 網絡RTK工作原理
網絡RTK是在常規RTK的理論和應用基礎上,以資源共享為宗旨,在一定的區域范圍內根據需求建立若干個固定的CORS站,利用現代通信技術將這些參考站與數據中心組成網絡,如圖3所示,其中參考站負責GNSS數據采集,通信鏈路負責數據傳輸,數據中心則根據多個基準站的已知誤差,用一定的算法來推算該區域內任何一處流動站的未知誤差,然后在此基礎上,建立高精度的雙差解算模型,解算整周模糊度,得到基準站與用戶流動站的高精度基線向量,類似于常規RTK基準站法,進一步得到用戶流動站的高精度實時定位結果。
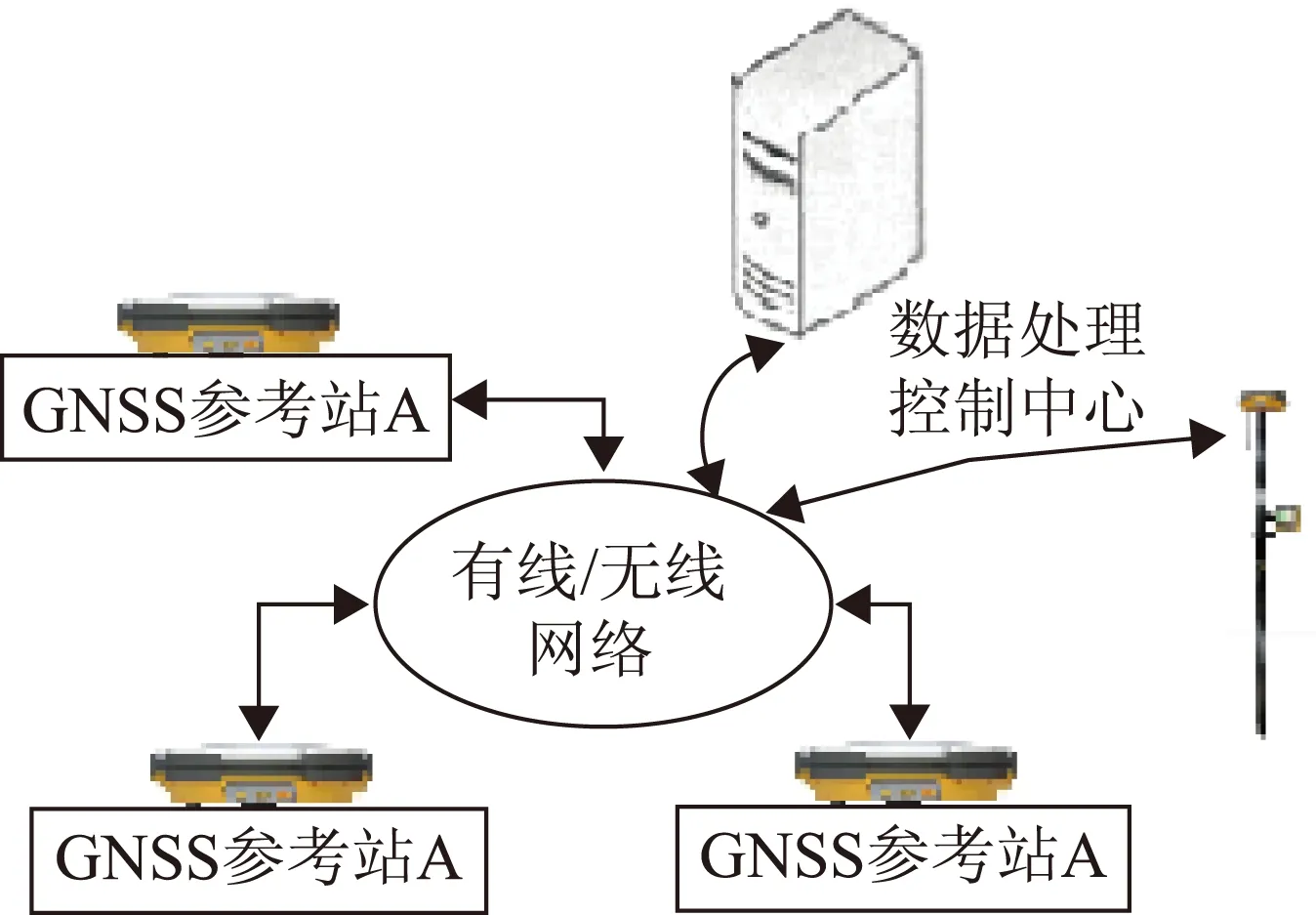
圖3 網絡RTK工作原理圖
在處理星歷誤差、衛星鐘差、電離層及對流層等誤差的計算,以及建立高精度的載波相位雙差解算模型中,當前網絡RTK采取的具體技術主要有:虛擬參考站(virtual reference station,VRS)[4-5]、區域改正數(Fl?chen Korrektur Parameter,FKP)技術[6]、主輔站技術(master-auxiliary concept,MAC)[7-8]以及綜合誤差內插法(combined bias interpolation,CBI)[9-10]。
2.4 比較與分析
載波相位相對定位是常規RTK、常規RTK任意基準站法以及網絡RTK的共同基本原理。從工作原理的具體技術方面比較,它們的區別主要有:(1)資源共享方面,網絡RTK優于常規RTK。常規RTK作業中,每一單位用戶需要自己配置基準站,而網絡RTK用戶只需處于網絡覆蓋范圍即可,無需配置基準站;(2)多基準站網絡RTK的作業范圍較大。最初的網絡RTK為單基準站法,除基準站的配置與否外,其差分定位原理與常規RTK任意基準站法相同,都是依據載波相位的原始觀測值建立雙差模型,通過求差的方式消除或消弱誤差的影響,這就要求基準站與流動站必須相距較近,以保證各種誤差的時空相關性;而多基準站網絡RTK則根據網絡內基準站的已知信息、基準站和流動站的觀測數據,求解了網覆蓋范圍內的相關誤差改正信息,在構建雙差模型時,綜合考慮了這些改正信息,保證了其定位精度,克服了常規RTK的定位精度隨著流動站離基準站距離增加而降低的缺陷;(3)多基準站網絡RTK的系統穩定性較好。現行的網絡RTK系統一般有多個基準站,當一個或多個參考基準站出現故障時,利用剩余的參考基準站仍能正常工作,故系統的可靠性相對較高。
3 工作流程比較與分析
正確的儀器設置和作業流程是利用RTK進行作業的前提,以下首先介紹常規RTK、常規RTK任意基準站法以及網絡RTK的作業流程,并對各種方法的作業流程進行比較分析。
3.1 常規RTK作業流程
利用常規RTK作業時,其工作流程是:(1)新建工程項目;(2)基準站設置。用電子手簿及RTK軟件連接基準站,使得基準站的外掛/內置電臺按照一定頻道播發基準站觀測數據。設置基準站坐標及儀器高,設置坐標轉換參數(如7參數、投影參數等);(3)連接用戶流動站,設置流動站儀器高、差分數據格式等,當RTK軟件處于測量狀態時,其解顯示為固定即可,在已知點上進行檢核;(4)當檢核結果符合厘米級精度后,開始碎部點采集、放樣、勘測等測量工作。
3.2 常規RTK任意基準站作業流程
利用任意基準站RTK作業時,其工作流程大致為:(1)新建工程項目;(2)基準站設置。用電子手簿及RTK軟件連接基準站,使得基準站的外掛/內置電臺按照一定頻道播發基準站觀測數據;(3)連接用戶流動站,設置流動站儀器高、差分數據格式等,當RTK軟件處于測量狀態時,其解顯示為固定即可進入下一步;(4)點校正法配置坐標系統。在2~3個已知點上進行坐標采集,然后調用參數設置的“坐標系統”菜單項,利用“平面+高程擬合”或“七參數”菜單功能,進行已知點兩套坐標配準,并進行坐標轉換參數計算;(5)到其他已知點進行檢核,如符合厘米級測量精度,則可開始碎部點采集、放樣、勘測等測量工作。
3.3 網絡RTK作業流程
利用網絡RTK作業時,其工作流程大致為:(1)新建工程項目;(2)流動站設置。移動站使用內置網絡功能,數據鏈選擇內置網絡,內置網絡的類型有GPRS、CDMA、GSM,可通過點擊右端網絡模式選擇其中的一種。如圖4,給出了中海達網絡RTK的流動站網絡設置示意。
當流動站的網絡連接設置好后,當RTK軟件處于測量狀態時,其解顯示為固定即可進入下一步;(3)點校正法配置坐標系統。在2~3個已知點上進行坐標采集,然后調用參數設置的“坐標系統”菜單項,利用“平面+高程擬合”或“七參數”菜單功能,進行已知點兩套坐標配準,并進行坐標轉換參數計算;(4)到其他已知點進行檢核,如符合厘米級測量精度,則可開始碎部點采集、放樣、勘測等測量工作。
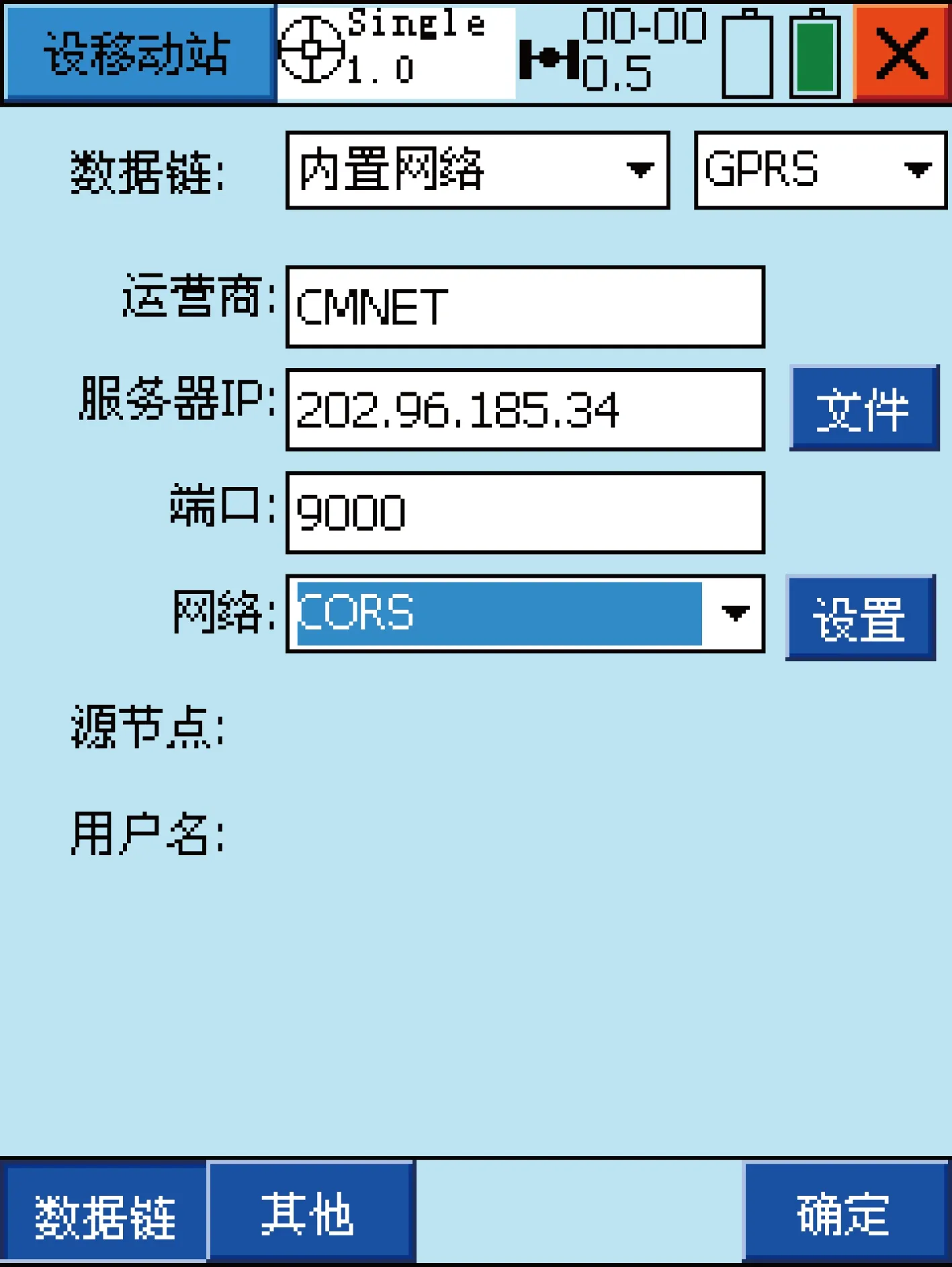
圖4 網絡RTK流動站網絡設置
3.4 比較與分析
從上述的工作流程可見,常規RTK是需要設置基準站的測站坐標和儀器高信息,通過設置7參數和投影參數的方法實現坐標成果的轉換;常規RTK任意基準站法不需要設置基準站的測站坐標和儀器高信息,通過點校正法配置坐標系統;網絡RTK不需要另設基準站,通過通信網絡,直接接收CORS站的觀測數據和差分信息,這些功能在流動站的設置中完成。其坐標系統的配置與常規RTK任意基準站法相同。
為了驗證上述方法作業流程的正確性,以某校的實習基地為實驗場地,以中海達GPS V30 RTK為實驗儀器設備,分別以常規RTK、常規RTK任意基準站法和網絡RTK進行了實驗,實驗數據列于表1,因為RTK測量可達厘米級,故只給出小數點后面的部分。

表1 常規RTK、常規RTK任意基準站及網絡RTK測量結果
從表1的結果可以看出,相對于已知坐標,常規RTK、常規RTK任意基準站法和網絡RTK都可達到厘米級的測量結果。說明上述各作業流程都是正確的。
4 結束語
文中針對RTK技術的理論和應用問題,詳細地解析了常規RTK、常規RTK任意基準站法及網絡RTK技術的工作原理,并對其相應的作業流程進行了詳細的闡述和分析比較。對于RTK的使用者,尤其是初學者,這些研究成果可幫助其理解RTK、使用RTK。
隨著GNSS技術的發展,尤其是我國北斗衛星導航系統的建設與運行,我國測繪行業將面臨重大的變革,懂得GNSS定位原理、會用GNSS技術進行測量工作將是大勢所趨。
[1] 李克昭,韓夢澤,孟福軍.北斗系統的特色、機遇與挑戰[J].導航定位學報,2014,2(2):21-25.
[2] 李克昭,楊力,柴霖,等.GNSS定位原理[M].北京:煤炭工業出版社,2014:200-220.
[3] 張勤,李家權.GPS測量原理及應用[M].北京:科學出版社,2005,134-136.
[4] CRUDDACE P,WILSON I,GREAVES M,et al.The long Road to Establishing a National Network RTK Solution[EB/OL].[2014-05-12].http://www.geopp.de/pdf/OSUK-FIG2002.pdf.
[5] 史小雨,鮑志雄,潘國富.基于虛擬參考站技術的組合差分信息生成研究與實現[J].導航定位學報,2014,2(2):102-105.
[6] 李健,呂志平,喬書波.連續運行參考站網的演化與發展趨勢[J].測繪科學,2008,33(S1):44-46.
[7] EI-MOWAFY A.Analysis of the Design Parameters of Multi-reference Station RTK GPS Networks[J].Journal of Satellite and Land Information Science (SaLIS),2005,65(1):17-26.
[8] 吳星華.利用徠卡主輔站技術建立重慶市GNSS綜合服務系統[J].測繪通報,2007(3):74-75.
[9] 唐衛明,劉經南,劉暉,等.一種GNSS網絡RTK改進的綜合誤差內插方法[J].武漢大學學報:信息科學版,2007,32(12):1156-1158.
[10]馬洪濱,孫軍,周海壯,等.鞍山市連續運行參考站系統建設與定位精度分析[J].導航定位學報,2013,1(1):89-95.
Comparison and Analysis of Standard RTK & Network RTK Methods
WEI Yan-zhong
(Construction & Installation Engineering Co.Ltd of CR11BG,Xiangyang 441057,China)
Along with the rapid development of global navigation satellite system (GNSS) technologies,real time kinematic (RTK) is showing its incomparable advantages in the centimeter level requirements projects,such as surveying and setting-out.In this paper,according to the theories of GNSS carrier phase differential positioning,the operational principles of standard RTK,and arbitrary base station RTK are analyzed in detail.On the basis of these,the operational principle of network RTK is introduced.And the similarities & differences,and the intercommunications between standard RTK and network RTK are compared and analyzed.From the application point of view,the operational steps of standard RTK,arbitrary base station RTK and network RTK are given here.And the similarities & differences of their operational steps are compared and analyzed.Moreover,the validities of their operational steps are proved by the surveying data.For the standard RTK & network RTK users,the results of this paper have a certain reference value.
global navigation satellite system (GNSS);real time kinematic (RTK);arbitrary base station;network RTK
2014-07-21
韋延忠(1962),男,湖北襄陽人、工程師,主要從事衛星導航定位的應用研究。
P228
A
2095-4999(2015)-01-0015-04
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30