脈沖星導航的相對論定位法(Ⅰ):相對論定位系統
2015-05-06 02:40:08費保俊黃文宏孫維瑾賀珍妮
導航定位學報 2015年1期
費保俊,黃文宏,孫維瑾,賀珍妮
(1.裝甲兵工程學院 基礎部,北京 100072;2.北京師范大學 物理系,北京 100875)
脈沖星導航的相對論定位法(Ⅰ):相對論定位系統
費保俊1,黃文宏2,孫維瑾1,賀珍妮1
(1.裝甲兵工程學院 基礎部,北京 100072;2.北京師范大學 物理系,北京 100875)
為了討論脈沖星導航的相對論定位法,介紹近年來國際上興起的相對論定位系統。它是以導航星座的固有時間(即自身攜帶時鐘記錄的時間)為坐標的一種新型的定位方法,相對于以導航星座時空坐標為基準的方法,在一定前提下具有較大優越性。
相對論定位系統,零標架,光坐標
1 引言
無論是衛星導航還是現在正在研究中的X射線脈沖星導航(X-ray pulsar-based navigation,XNAV),都是測量光波從導航星座(衛星或脈沖星)到達觀測者的傳播時間即光子到達時間(time of arrival,TOA),由于光速不變性,TOA等價于導航星座到觀測者的距離,可以將這種導航方法稱作TOA定位法。從純粹廣義相對論的觀點來看,TOA定位法中測量的系統時間(例如北斗時(BeiDou navigation satellite system time,BDT)或全球定位系統時(global positioning system time,GPST)屬于坐標時間在考慮引力作用的情況下,坐標時間并不滿足光速不變性,于是將引力對測量時間的影響(相對論效應)作為一種修正加進去,因此TOA定位法實際上是一種半經典理論,是經典力學與相對論的混合體。
原則上說,直接在相對論框架內建立導航理論是完全可行的,有不少學者在這方面作了深入探討。文獻[1]在深入研究衛星導航理論過程中,首先將相對論測量理論引入導航系統,提出全球定位系統(global positioning system,GPS)中的可觀測量是指固有量而并非坐標量,認為應該借鑒相對論天體物理的研究方法,在4維零標架中討論光傳播問題,文獻[2]隨后建立了一種共軛零標架,將對應坐標稱之為GPS典型坐標;文獻[3-8]將這一方法系統化,提出4個發射體的固有時間構成4維時空的光坐標或發射坐標,可以為任意觀測者定位導航。由此建立起來的理論體系稱之為相對論定位系統(relativistic positioning system,RPS),它是以相對論測量理論為基礎的一種全新的導航方法。
為敘述方便,本章采用c=1的自然單位制,即下文中的時間理解為通常時間的c倍,量綱為長度,速度是以c為度量單位的無量綱物理量。
2 正交標架與零標架

(1)
(2)
這里采用愛因斯坦求和慣例,即表達式中上下指標相同時表示對該指標求和。式(2)中的〈,〉定義為兩個4維矢量的閔氏內積,相當于3維歐氏空間的矢量點積。該標架的特點是時間和空間概念比較清楚。
(3)

(4)

(5)
如果度規張量的對角元素gaa=0,則有
(6)
式(6)中的3維歐氏空間矢量
(7)

同理,根據度規張量的逆變分量與閔氏度規的關系
(8)
以及共軛基矢量之間的關系
(9)
可以證明,gaa=0表示每一個新共軛基矢ωa在閔氏標架的共軛時間軸e0上的分量值與3維歐氏空間的分量值相同,新共軛基矢量是零矢量。
綜合上面的討論,將
gaa=0 或gaa=0
(10)
的標架稱作零標架(nullframe)或共軛零標架(conjugatenullframe),其含義為標架的基矢量或共軛基矢量是閔氏空間的零矢量。

圖1 3維閔氏空間的零標架及其在2維歐氏空間的投影
舉一個3維時空零標架的例子。如圖1所示,設新標架基矢量(ω1,ω2,ω3)與3維正交標架基矢量的關系是
(12)
利用式(3)可得該標架下的度規
g11=g22=g33=0
所以{ω1,ω2,ω3}構成一個3維零標架。從圖中可以看出,零標架的3個基矢量均位于原點的光錐上,它們在2維歐氏空間{x1,x2}上的投影分別是
(13)

零標架的固有性質為研究光波的傳播特性提供了一個非常有效的工具,下面討論的相對論定位系統就是基于零標架的一種新的導航方法。
3 零標架中的光坐標
如圖2所示,設發射體(導航星座)在閔氏空間的世界線為γa(τa)(a=1,2,3,4),τa為發射體a的固有時。 在運動過程中發射體不斷沿自身光錐發射光波,當觀測者接收到4個發射體的光波時,表明發射點Pa(xa)必定位于接收點P(x)的過去光錐上,或者說接收點必定是4個發射點將來光錐的交點。由于沿光錐的時空間隔為0,即PPa的閔氏長度為0,有
0=ημν(xμ-xaμ)(xν-xaν)
=ημνxaμxaν-2ημνxaμxν+ημνxμxν
=
(14)
發射點坐標(xaμ)是指發射體a的時空坐標的μ分量,當它們為已知量時,由上面4式可確定接收點的坐標(xμ)。這實際上就是衛星導航的基本原理。
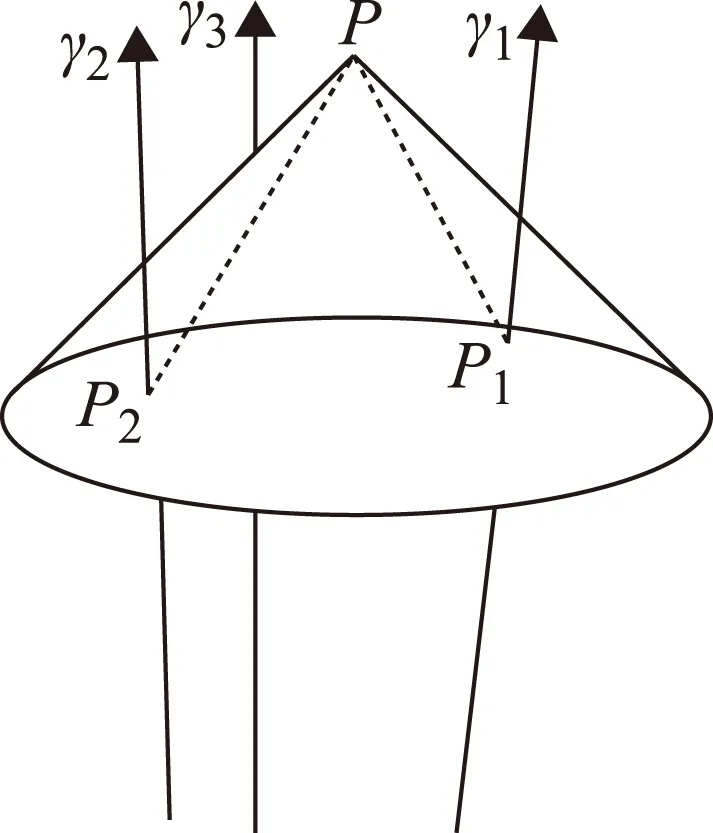
圖2 發射體的世界線與觀測者的過去光錐
假設發射體a的3維速度va為常量,則4維閔氏速度也是常量
(15)
積分得
xaμ=xaμ(0)+uaμτa
(16)
注意式中的“0”是指τa=0,即xaμ(0)表示發射體a在τa=0時的4維初始坐標。將上式代入式(14)并利用閔氏速度內積
時空間隔變成
(τa)2-2τa
(17)
式(17)中的
(18)
是觀測者相對于發射體初始位置的4維位移矢量。由此解出
(19)
這里已經舍去根號前取“+”號的另一解,因為它對應于發射體世界線與接收點的將來光錐相交,與所設條件不符。如果發射體的速度uaμ以及初始坐標xaμ(0)為已知量,上式給出發射體的固有時與觀測者坐標的關系。
式(19)表明發射體的固有時是觀測者坐標的函數
進一步將它當成一種坐標變換,只要變換矩陣的行列式不為0,則

既然光坐標構成坐標系,就應該有相應的標架和度規,下面證明光坐標對應的標架正是所謂的零標架。將式(19)對坐標dxμ=dξaμ微分
(20)
式(20)中的協變分量
(21)
{τa}與{xμ}的變換系數為
(22)
由式(8),不難求出度規張量的對角元素
(23)
因此發射坐標{τa}構成零標架。顯然,式(19)也可表示成
(24)
此時可以看到,所謂相對論定位系統,其實質是以發射體(導航星座)的固有時間即4個光坐標τa而不是16個時空坐標xaμ來確定觀測者的運動狀態xμ,但前提是4個發射體的速度為已知常量。這4個光坐標是零標架的4個分量,任意觀測者的運動狀態可以唯一地由這4個坐標所確定。
4 2維平直時空的相對論定位法
通過上面的討論可以得到應用RPS的前提條件是導航星座應該具有確定的速度。如果導航星座可以看成分段勻速直線運動,則可以對每一段的發射體初始位置和運動速度建立零標架。如果發射體具有不變的常速度則問題變得相對簡單,而X射線脈沖星在質心天球參考系(barycentriccelestialreferencesystem,BCRS)中的速度(自行)在較長時間內可以看成常數。下面來討論2維時空中脈沖星導航的相對論定位法。
在BCRS中引入2維Newman-Penrose坐標{U,V},與2維閔氏坐標{t,x}的關系分別為

(25)
新坐標下的線元是
dτ2=dt2-dx2=dUdV
(26)
因g11=g22=0,故Newman-Penrose標架是零標架。
設脈沖星a(a=1,2)在BCRS中的速度va為常數,根據式(15)和式(25),可知脈沖星的閔氏速度矢量在零標架下的分量也為常量
(27)
式(27)中定義的
是va對應的閔氏時空雙曲角,這里只需要理解為一個代號。設脈沖星的初始坐標分別為(Ua(0),Va(0)),由上式積分得到它們的坐標是
(28)
根據發射點(Ua,Va)與接收點(U,V)的時空間隔
(U-Ua)(V-Va)=0
(29)
解出U=Ua或V=Va。如果航天器位于兩顆脈沖星之間,則接收點的坐標為
(30)
式(30)也可以根據式(19)求出。將
代入式(19),求出脈沖星a的固有時
分別取a=1,2就得到
(31)
式(31)與式(30)完全一致。
設脈沖星的初始時空坐標滿足
t1(0)=-x1(0),t2(0)=x2(0)
(32)
即U1(0)=0,V2(0)=0。則式(30)或式(31)簡化成
(33)
當兩顆脈沖星的速度(v1,v2)已知的情況下,航天器的時空坐標(t,x)與光坐標(τ1,τ2)或(U,V)存在一一對應關系。

圖3 發射點和接收點的時空坐標(a)與光坐標(b)
下面通過圖3作具體說明。
圖3中{t,x}和{U,V}是正交標架和零標架,γ,γ1,γ2是航天器和兩顆脈沖星的世界線。由于脈沖星做勻速運動,脈沖星世界線是2維時空的斜直線,與時間軸的夾角θ=tan-1v(取c=1)反映了脈沖星在BCRS中的速度。設兩顆脈沖星的初始時間和空間坐標分別滿足式(36),實際上是要求坐標原點的光坐標為(0,0)。脈沖星不斷沿自身的光錐發射光波,這些波矢量構成坐標系{U,V}的坐標網格(grid),每一條波矢量就是一條坐標線,對應于一顆脈沖星的固有時。例如,設兩顆脈沖星的固有周期分別是P1,P2,它們每隔一個周期發射一個脈沖,則圖中P點對應的固有時分別為τ1=5.0P1,τ2=2.0P2,即它的光坐標為(τ1,τ2),如果用(U,V)表示則為(ew1τ1,e-w2τ2)。
5 結束語
從本質上看,相對論定位法不是直接測量航天器的時空坐標,而是測量導航星座的固有時間,如果導航星座發射穩定的光波,就可以根據光波的相位(取決于發射體的固有時間)得到光坐標,達到導航定位的目的。
[1]ROVELLIC.GPSObservablesinGeneralRelativity[J/OL].(2001-10-12)[2014-04-21].http://arxiv.org/pdf/gr-qc/0110003.pdf.
[2]BLAGOJEVICM,GARECKIJ,HEHLFW,etal.RealNullCoframesinGeneralRelativityandGPStypeCoordinates[J/OL].(2001-11-27)[2014-04-21].https://archive.org/stream/arxiv-gr-qc0110078/gr-qc0110078_djvu.txt.
[3] COLL B,FERRANDO J,MORALES J.Two-dimensional Approach to Relativistic Positioning Systems[J/OL].(2006-05-22)[2014-04-21].http://arxiv.org/pdf/gr-qc/0602015.pdf.
[4] COLL B,FERRANDO J,MORALES J.Positioning with Stationary Emitters in a Two Dimensional Spacetime[J/OL](2006-11-02)[2014-04-21].http://syrte.obspm.fr/~coll/Papers/CoordinateSystems/StatEmitters2L.pdf.
[5] COLL B,POZO J.Relativistic Positioning Systems:the Emission Coordinates[J/OL].[2014-04-21].https://archive.org/stream/arxiv-gr-qc0606044/gr-qc0606044_djvu.txt.
[6] RUGGIERO M L,TARTAGLIA A.Mapping Cartesian Coordinates into Emission Coordinates:Some Toy Models[J/OL].[2014-04-21].http://arxiv.org/pdf/0710.0788v1.pdf.
[7] BINI D,GERALICO A,RUGGIERO M L,et al.Emission Versus Fermi Coordinates:Applications to Relativistic Positioning Systems[J/OL].[2014-04-21].https://archive.org/stream/arxiv-0809.0998/0809.0998_djvu.txt.
[8] BUNANDAR D,CAVENY S A,MATZNER R A.Measuring Emission Coordinates in a Pulsar-based Relativistic Positioning System[J/OL].(2011-12-08)[2014-04-21].http://arxiv.org/pdf/1107.1688v4.pdf.
Relativistic Positioning Method of Pulsar-based Navigation I:Relativistic Positioning System
FEI Bao-jun1,HUANG Wen-hong2,SUN Wei-jin1,HE Zhen-ni1
(1.Department of Fundamental Courses,Academy of Armored Force Engineering,Beijing 100072,China;2.Department of Physics,Beijing Normal University,Beijing 100875,China)
In order to discuss relativistic positioning method of pulsar-based navigation,we are going to introduce the international rise in recent years of relativistic positioning system.It is a new positioning method based on the proper time of navigation constellations(i.e.,the time recorded by its own clock).Compared with the method based on time and space coordinates of navigation constellation,it has a large advantage under certain premise.
relativistic positioning system(RPS),null frame,light coordinates
2014-07-03
費保俊(1956),男,湖北洪湖人,教授,主要從事應用相對論和脈沖星導航研究工作。
P131,V44
A
2095-4999(2015)-01-0019-05