面向多停泊基地的港口拖輪作業配置仿真決策
2015-05-07 08:55:16
物流技術 2015年19期
(武漢科技大學 汽車與交通工程學院,湖北 武漢 430081)
1 引言
港口作業過程中拖輪作業是必不可少的環節,貨船的進港、移泊、出港都需要拖輪的輔助。港口經營是為了安全、高效地實現到港船舶的裝卸任務,保證航運物流的順暢運行,從而獲得經濟效益和社會效益。拖輪資源是目標實現的關鍵因素,拖輪資源不足會增加貨船的在港等待時間,從而出現壓港現象,導致港口的裝卸生產作業停滯,增加了貨船的在港費用,使港口服務質量降低,削弱港口的競爭力;拖輪資源過剩導致拖輪利用率降低,港口運營成本增加。港口拖輪資源的合理配置是港口經營取得成功的重要保證。
單停泊基地的拖輪作業模式限制了港口規模的擴大,多停泊基地能有效解決拖輪單停泊基地拖輪空駛增大的問題。通過研究找出多停泊基地下的拖輪配置方案,以達到提高港口服務質量、減少貨船在港時間、降低運營成本、提高港口競爭力的目的。
拖輪資源對于港口運營有十分重要的作用,已經有很多學者對這方面進行了研究。熊軍魁[1]通過定性分析我國港口發展趨勢,結合天津港實際情況為解決拖輪配置相關問題提出建議;王歡[2]、陸海波[3]運用定量和定性相結合的方法,分別以上海港和寧波港為例,分析了影響拖輪配置的相關因素,建立相應的數學模型求解出相應的拖輪配置策略;劉志雄等[4]、楊志華[5]利用離散事件仿真技術,對港口拖輪作業過程進行仿真建模,運用多個評價指標對不同拖輪配置方案的仿真結果進行分析,從而找出較優的拖輪配置方案,為合理配置拖輪提供決策依據;這些學者主要集中在單停泊基地的拖輪配置研究。劉志雄[6]首先提出了針對多停泊基地拖輪作業模式調度問題的研究;王巍等[7]、徐奇等[8]對多停泊基地的不同作業模式下調度問題進行建模和優化研究;劉志雄[9]、何濤等[10]、王伯恩[11]、談鵬[12]則運用優化方法對拖輪調度優化問題進行了相關研究。根據已有研究文獻,目前針對多停泊基地拖輪作業配置問題的研究還十分缺乏。
本文通過eM-plant建立三種模式下的港口拖輪作業仿真系統,結合某港口實際運行數據進行多級仿真實驗,分析不同實驗下的系統評價指標,為不同拖輪作業模式下的拖輪配置提供決策依據,通過橫向比較為港口拖輪作業模式的選擇提供決策支持。
2 港口拖輪作業過程分析
港口作業各階段的順利進行是實現港口運營目標的重要保證,港口作業從貨船進港開始,一般貨船進港后首先在錨地等待辦理相關進港手續,然后在拖輪的協助下通過航道到達碼頭進行相應的裝卸作業(碼頭作業可能涉及到在多個碼頭間作業,需要拖輪協助作業,這一過程稱為移泊),碼頭作業完成后由拖輪輔助貨船駛離碼頭,最后貨船自行離開港口。圖1為港口的一般作業過程。
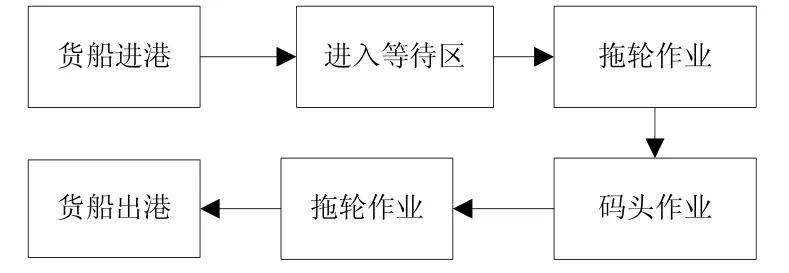
圖1 港口作業過程
貨船進入港口到貨船離開港口,需要拖輪服務的主要有三個環節。
(1)進港。船舶到達港口航道需要拖輪對其輔助作業使其進入預先安排的泊位進行裝(卸)作業。
(2)移泊。當貨船裝卸貨物種類較多需要在多個碼頭進行作業時,由于貨輪不能自行在碼頭間移動,需要拖輪作業輔助實現。
(3)出港。貨輪碼頭作業完成后需要在拖輪的幫助下離開泊位進入航道。
貨船進入港口只要需要在碼頭進行裝卸作業,就必需有拖輪輔助作業過程,有的貨船只有進港、出港作業環節,而有的貨船可能有進港、移泊、出港三個作業環節,一般情況下調度中心在接到貨船的服務請求后都需要根據貨船的船長或噸位安排相應馬力的一艘或幾艘拖輪為其提供服務,以保證港口的正常運作。
3 港口拖輪作業仿真建模
3.1 系統描述
貨船作為流動實體進入系統,由拖輪協助進行進港作業,進港作業完成后在碼頭進行裝卸作業,然后根據貨船是否需要進行移泊作業分別在拖輪協助下進行移泊作業或出港作業,如果貨船需要進行移泊作業則到達另一碼頭進行裝卸作業后再進行出港作業,出港作業完成后流動實體退出系統。港口拖輪作業仿真系統功能模塊如圖2所示。
拖輪作業主要在進港、移泊、出港三個環節。貨船進入系統后到達進港作業層,根據自身屬性(貨船船長)進入相應的作業區,觸發服務請求,調度中心根據現有拖輪資源作出反應,如果有滿足要求的拖輪資源,則分配給請求的作業區進行相應作業;如果拖輪資源不能滿足要求則反饋到作業區,貨船在該作業區排隊等候直至有滿足要求的拖輪資源為其提供服務。移泊和出港的拖輪作業機制與進港拖輪作業機制相同。
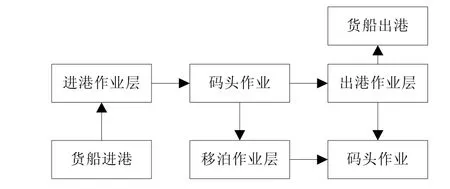
圖2 港口拖輪作業仿真系統功能模塊圖
兩個停泊基地下不允許交叉作業情況和單停泊基地相似,區別在于每個停泊基地的拖輪作業范圍變小,每個停泊基地只接受服務范圍內的作業區的服務請求并為其提供服務。對于兩個停泊基地允許交叉作業情況下,拖輪基地也劃分相應的服務范圍,但是當一個停泊基地不能滿足所屬范圍的作業區的服務請求時,可以將服務請求傳遞給另一個停泊基地,如果另一個停泊地有滿足要求的拖輪資源時則為其提供服務。港口拖輪作業系統仿真流程如圖3所示。
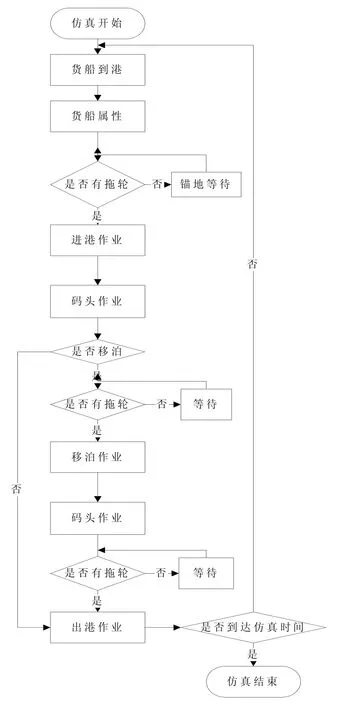
圖3 港口拖輪作業系統仿真流程圖
3.2 系統目標
運營成本和服務水平是評價港口作業系統運營好壞的主要依據。拖輪利用率直接影響著港口的運營成本,貨船在港時間是評價港口服務水平的主要指標。
對于兩個停泊基地的拖輪作業系統目標描述如下:假設用i(i=1,2)表示停泊基地,j(j=1,2,3,4)表示每個停泊基地的拖輪類型,Nij表示第i個基地第j種類型拖輪的數量。進港貨船數量用k(k=1,2,...,K)表示,每艘貨船所需拖輪服務時間為TK,每艘貨船在港時間為tk,仿真實驗運行時間為t。U為拖輪平均利用率,W為貨船平均在港時間。
3.3 仿真模型介紹
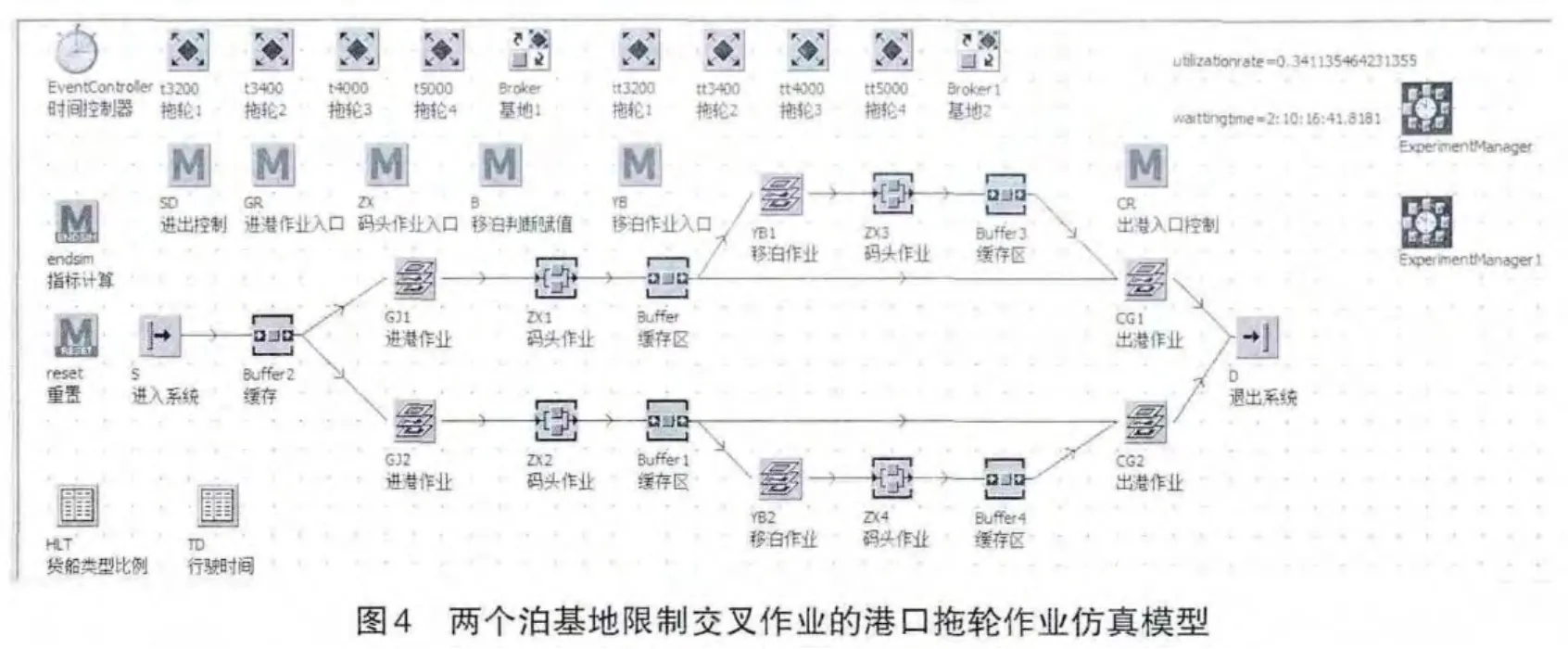
根據上述對港口拖輪作業系統的分析,建立了三種模式下的港口拖輪作業系統仿真模型。以兩個停泊基地限制交叉作業模式為例對模型進行簡單介紹,系統主要包括貨船進港模塊、進港作業模塊、碼頭作業模塊、移泊作業模塊、出港作業模塊和貨船出港模塊。
貨船進港模塊主要是根據分析的數據模擬貨船的產生并設置記錄相關貨船信息,包括貨船產生的時間間隔、貨船類型、貨船進行裝卸作業的碼頭等。進港作業模塊由緩存區、進港作業層以及控制程序組成,該模塊是根據進港貨船的船長、作業碼頭等信息使貨船進入相應的作業場所并發送拖輪協助作業請求完成拖輪作業過程。
碼頭作業模塊是表示貨船的裝卸作業,在此模型中通過設置作業時間來表示這一過程,碼頭作業完成后需要判斷貨船是否需要移泊,如果移泊則進入移泊作業層,否則進行出港作業。移泊作業模塊和進港作業模塊功能相同,只是它表示的是貨船在不同碼頭間移動時的拖輪作業過程,移泊作業模塊包括移泊后的裝卸作業過程。出港作業模塊和進港作業模塊的設置及功能相似,它表示的是貨船從碼頭到航道口的拖輪作業過程。貨船出港模塊表示貨船在港作業完成后出港的過程,意味該艘貨船的仿真過程結束。
模型中還包含程序控制對象,用于設置各個模塊的相關屬性和記錄用于系統目標計算的數據。由各模塊組成的兩個停泊基地限制交叉作業的港口拖輪作業仿真模型如圖4所示。單停泊基地和兩個停泊基地交叉作業模式的仿真模型大體相同,只是在拖輪資源的調用策略上有所差異。
4 仿真實驗設計及結果分析
4.1 仿真數據分析
通過對某港口歷史數據分析得到在建模過程中需要設置的一些參數,如:貨船類型分布、進港時間間隔分布、碼頭作業時間分布等。表1為某港口拖輪作業報表部分數據。
從表1可以看出港口作業系統中,貨船的到達和到達的類型都是隨機的,通過對數據的處理分析,得到貨船進港時間間隔符合參數λ=1/27的負指數分布,到港貨船類型不符合標準分布,故仿真過程中采用經驗分布。
拖輪配置的主要依據是貨船的船長或噸位,通常一艘貨船有多種拖輪配置方案,如何有效為到港貨輪配置拖輪,不僅影響拖輪的利用效率,還關系到港口運營的順暢進行,是港口拖輪作業的重要環節。根據已有文獻的研究,引用如下的貨船拖輪配置原則:

表1 某港口拖輪作業報表(部分)
(1)100m以下:3 200馬力(以上)×1艘;
(2)100m至200m:3 200馬力(以上)×2艘;
(3)200m至250m:3 200馬力(以上)×2艘;
(4)250m至300m:3 400馬力(以上)×2艘;
(5)300m以上:4 000馬力(以上)×2艘。
4.2 仿真實驗設計
仿真實驗主要是運用歷史數據進行仿真,在盡可能真實的模擬實際運行狀況條件下得出不同拖輪作業模式下合適的拖輪配置決策。同時,在相同拖輪配置情況下對三種模式下的運行效果進行比較,為港口擴大規模選擇運行模式提供決策依據。
仿真實驗設計主要是通過實驗器進行多次重復實驗,將拖輪利用率和貨船在港時間作為實驗輸出,各種類型拖輪的數量作為輸入,觀察不同輸入條件下的輸出結果。單停泊基地的多級實驗設計見表2,共有144次仿真實驗,實驗序號從EXP001到EXP144。
多停泊基地輸出同單停泊基地相同,輸入變量值則為兩個停泊基地四種拖輪類型的八個輸入變量。多停泊基地多級實驗設計見表3,共有256次仿真實驗,實驗序號從EXP001到EXP256。
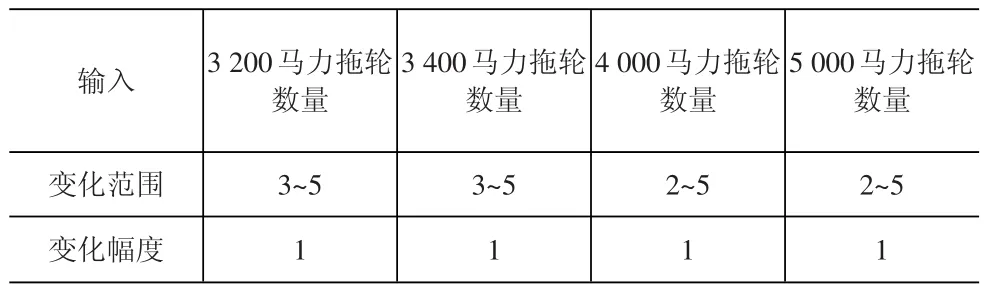
表2 單停泊基地多級實驗設計表
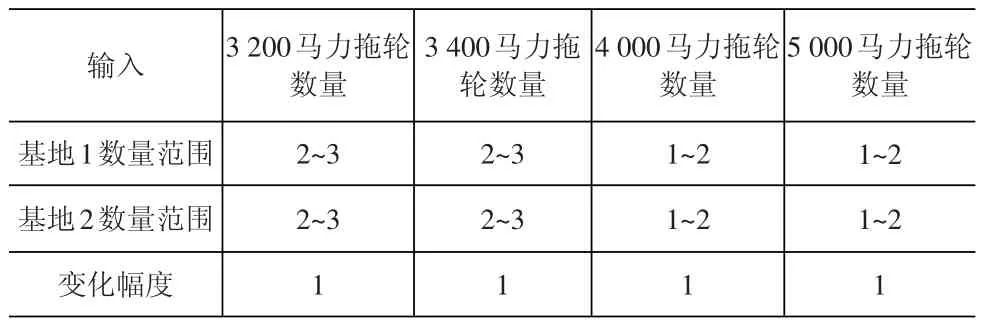
表3 多停泊基地多級實驗設計表
4.3 實驗結果分析
單停泊基地的實驗結果如圖5所示,多停泊基地限制交叉作業實驗結果如圖6所示,多停泊基地允許交叉作業實驗結果如圖7所示,三種模式下拖輪配置總數為16艘的部分實驗結果見表4。
充分考慮港口經營目標,在考慮經營成本的同時保證服務質量,以此為原則選擇運行結果中拖輪利用率和貨船在港時間都處于比較合理狀態的拖輪配置方案。貨船的最小在港時間為2天9小時47分鐘,不考慮在港時間情況下拖輪利用率可達50%。
對于單停泊基地可選擇拖輪配置總數為17艘時的拖輪配置方案,拖輪平均利用率為40.1%,貨船平均在港時間最小為2天11小時14分,具體配置為3 200馬力拖輪5艘、3 400馬力拖輪5艘、4 000馬力拖輪4艘、5 000馬力拖輪3艘;對于兩個停泊基地限制交叉模式下同樣可選擇拖輪總體配置為17艘拖輪的配置方案,拖輪平均利用率為40.1%,貨船平均在港時間最小為2天11小時44分,具體配置為停泊基地1中3 200馬力拖輪2艘、3 400馬力拖輪3艘、4 000馬力拖輪2艘、5 000馬力拖輪2艘;拖輪基地2中四種類型拖輪均為4艘。此上兩種模式如果想進一步提高拖輪利用率節省成本,可選擇總體拖輪配置為16艘的拖輪配置方案,貨船平均在港時間會有所增加。
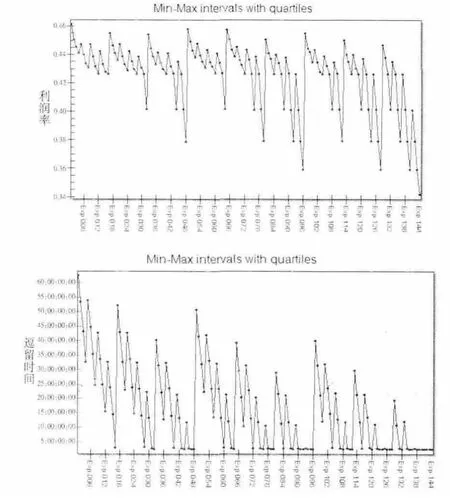
圖5 單停泊基地多級實驗結果圖
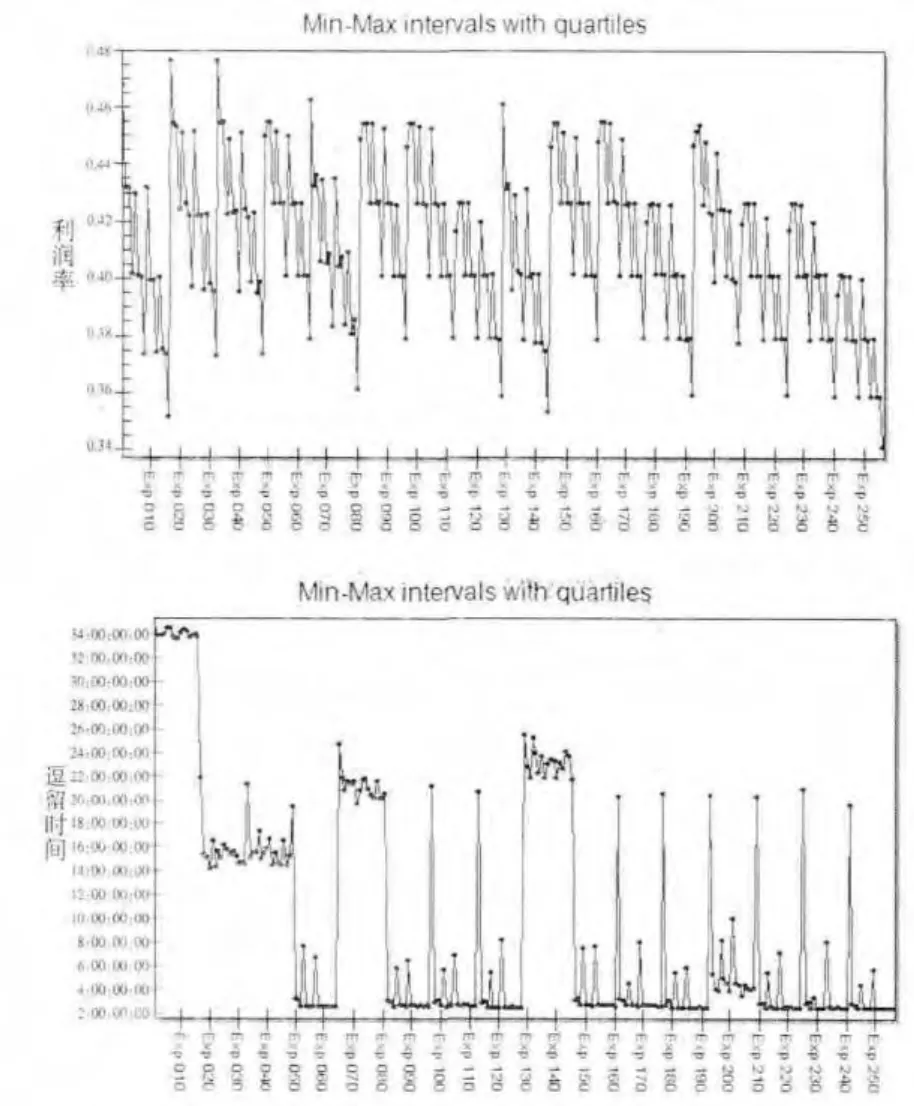
圖6 多停泊基地限制交叉作業實驗結果
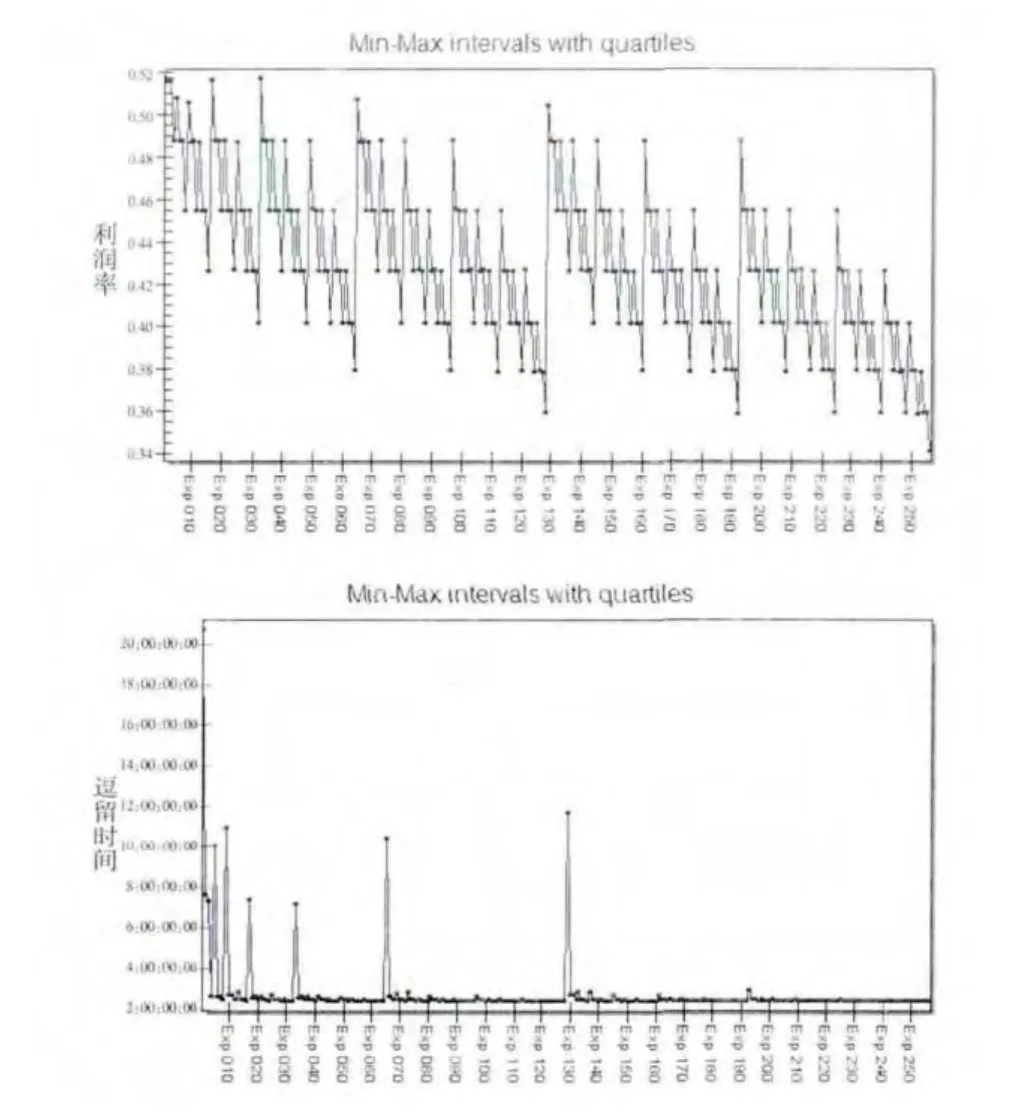
圖7 多停泊基地允許交叉作業實驗結果
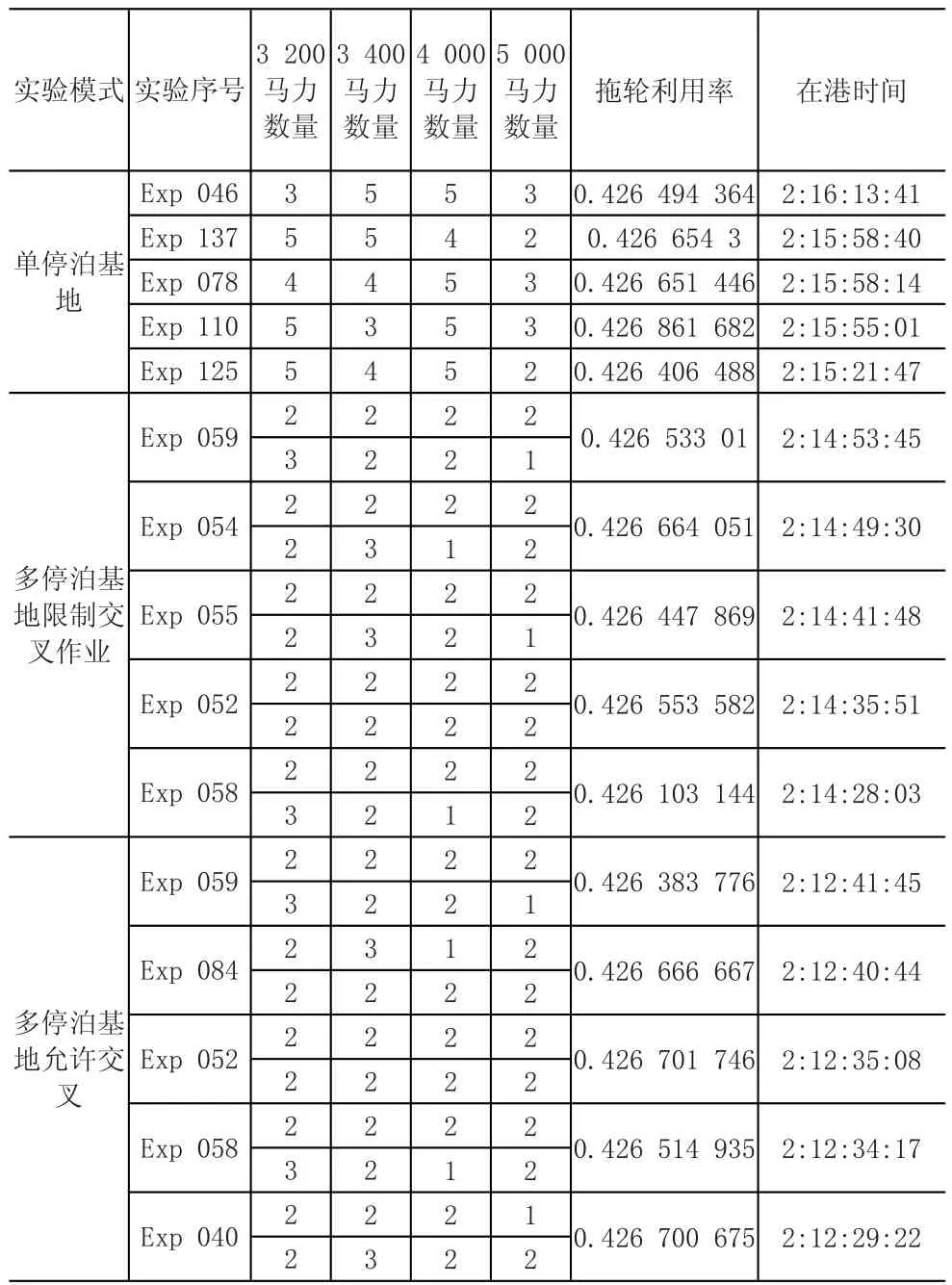
表4 拖輪配置總數為16艘的部分實驗結果
對于兩個停泊基地允許交叉作業模式,可選擇拖輪總體配置為16艘的拖輪配置方案,拖輪平均利用率為42.6%,貨船平均在港時間最小為2d12h29min,具體拖輪配置為停泊基地1中3 200馬力拖輪2艘、3 400馬力拖輪2艘、4 000馬力拖輪3艘、5 000馬力拖輪1艘,停泊基地2中3 200馬力拖輪2艘、3 400馬力拖輪3艘、4 000馬力拖輪2艘、5 000馬力拖輪2艘。
當三種模式的拖輪配置總量都為16艘時,由于貨船進港時間間隔和類型都相同且數據量較大,它們所需的拖輪服務時間大致相同,由上述公式可知它們的拖輪平均利用率相等且都為42.6%;由于多停泊基地減少了拖輪空駛時間,采取相同拖輪調度規則對單停泊基地和多停泊基地的影響不同,單停泊基地模式下貨船最短平均在港時間為2d15h22min,兩個停泊基地限制交叉作業模式下貨船最短平均在港時間為2d14h28min,兩個停泊基地允許交叉作業模式下貨船最短平均在港時間為2d12h29min。相同條件下多停泊基地拖輪作業模式優于單停泊基地拖輪作業模式,多停泊基地允許交叉拖輪作業模式優于多停泊基地限制交叉拖輪作業模式。
5 結束語
拖輪配置是港口生產的重要組成部分,其決定著港口經營目標能否實現。本文通過對港口拖輪作業系統分析運用eM-plan仿真軟件分別對港口三種拖輪作業模式進行仿真建模,以拖輪利用率和貨船在港時間為評價指標設計多級實驗,并對實驗結果進行縱橫向分析,分析三種模式的優劣以及每種模式下的拖輪配置,為港口的發展規劃和拖輪配置提供決策支持。
[1]熊軍魁.港口生產與拖輪配置問題探討[J].航海工程,2003,(1):45-46.
[2]王歡.上海港港作拖輪船隊發展分析[D].上海:上海海事大學,2007.
[3]陸海波.寧波港拖輪船隊優化配置研究[D].上海:上海海事大學,2007.
[4]劉志雄,王少梅.港口拖輪作業的計算機仿真研究[J].系統仿真學報,2004,(1):45-17.
[5]楊志華.港口拖輪優化配置研究[J].系統仿真技術,2012,8(2):169-174.
[6]劉志雄.基于一般集合多處理器任務的港口拖輪作業調度優化研究[R].天津港(集團)有限公司博士后出站報告,2011.
[7]王巍,趙宏,李強.面向多停泊基地的港口拖輪調度優化研究[J].計算機工程與應用,2013,(3):8-13.
[8]劉志雄.考慮最短距離作業的港口拖輪作業調度優化[J].西南交通大學學報,2011,46(5):875-881.
[9]徐奇,邵乾虔,靳志宏.基于混合流水作業組織的港口拖輪調度優化[J].系統工程理論與實踐,2014,34(2):485-493.
[10]何濤,朱宏輝.遺傳算法在拖輪調度中的應用[J].物流技術,2008,27(4):138-140.
[11]王伯恩.天津港拖輪調度系統設計與實現[D].天津:南開大學,2011.
[12]談鵬.基于AIS的港作拖輪調度系統研究[D].武漢:武漢理工大學,2013.
猜你喜歡
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:22
機電設備(2022年2期)2022-06-15 03:20:38
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2019年20期)2019-12-13 08:26:11
水上消防(2018年4期)2018-09-18 01:49:38
海洋世界(2016年12期)2017-01-03 11:33:00
故事大王(2016年7期)2016-09-22 17:30:08