基于單片機控制的圖書館機器人的開發
2015-05-07 02:49:50王濱韓丹李思遠夏建邦關心同殷彤白家振王立新鄭元松
機械工程師 2015年2期
王濱, 韓丹, 李思遠, 夏建邦, 關心同, 殷彤, 白家振, 王立新, 鄭元松
(1.大連豪森瑞德設備制造有限公司,遼寧 大連 116036;2.大連工業大學機械工程與自動化學院,遼寧 大連 116034)
0 引言
目前,找書難、上架難、移架難等問題是圖書館管理面臨的主要問題。主要的解決途徑是圖書館自動存取技術。就目前的發展水平來看,圖書館自動存取技術可分為3 類[2]:1)自動化的系統被實現在單個書架中;2)圖書館整體實現自動化的立體化倉儲系統;3)“移動機器人+機械手”的組合系統[3]。前兩種方案,圖書館需要更換全部設備,成本很高,并且日常管理較為復雜。第三種方案制造成本低,靈活性好。
本文采用“移動機器人+機械手”的設計思路,研發了以單片機為核心的圖書館移動機器人系統,這款機器人具有成本低廉,擴展簡單,具有較高的靈活性及穩定性等特點,可以在書架間靈活行走,發生故障時,能夠停止行走,等待修復,而圖書館仍然能正常開放[4]。
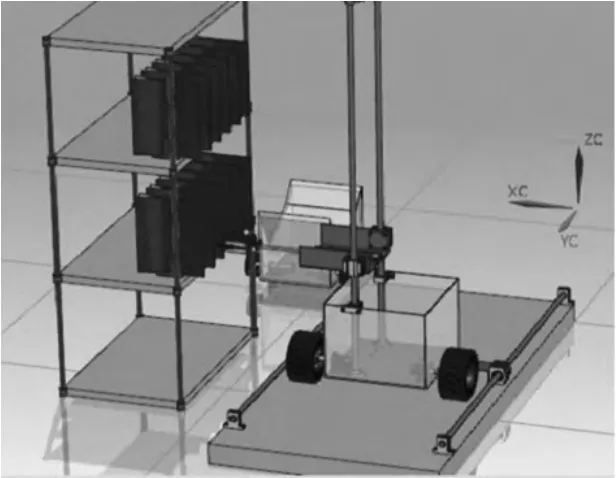
圖1 圖書館移動機器人
1 工作原理
移動機器人系統如圖1所示,包括機械結構主體、運輸車及控制系統,能夠完成 3個方向(x、y、z)的運動:橫向運動(x)由小車及實心滑軌組成,小車由伺服電機提供動力,單片機控制行進和停止,能夠定位貨物x軸坐標位置;縱向運動(z)由滑軌、機械臂整體、線軸部分組成,電機提供動力,單片機控制機械臂升降,能確定貨物在z軸的位置;前后運動(y)部分由機械臂和氣動手指組成,單片機控制電磁閥換向,實現手臂運動及手指夾緊。
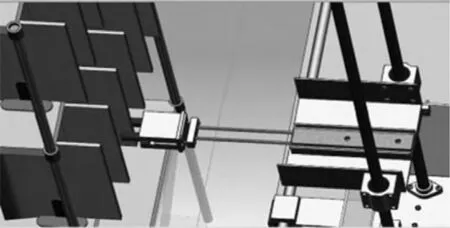
圖2 夾取機構
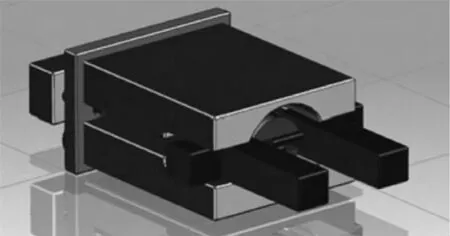
圖3 氣動手指
2 機械手設計
機器人的機械手具有水平方向、豎直方向、x方向3個自由度。并在末端安裝了可完成抓、放動作的手爪。夾取部分由氣動機械臂(如圖2)和特制夾頭(如圖3)組成。氣動機械臂是一個標準氣缸件,它的行程為200 mm。連接氣泵后,通過電磁閥的控制,氣缸內的活塞可以做伸縮運動,從而實現了手臂的自由伸縮。氣缸座用3 mm厚鋁板制成,上下滑軌采用φ16空心直管,這可節約材料,同時減輕上部的重量,降低了負載。
橫向運動部分由小車和滑軌組成,如圖4所示。橫向小車是橫向運動的動力源和信號源,因為其內部裝有電池這樣的能源裝置,還有電路板、單片機這樣的控制裝置,同樣裝有電機這樣的執行元件,通過電池供電和單片機的有效控制,可以實現有規律的橫向運動,最終可使整體機構可以在滑軌上隨意定位和移動。橫向小車通過連接兩個滑塊固定于橫向滑軌上,這樣才能實現一個自由度方向上的橫向平移。滑軌采用的是鋁合金實心管,強度高,表面光滑,直徑為16 mm,長度為1 500 mm。采用兩根導軌目的是使裝置底部更加穩定,機械運動更為精確,滿足了橫向運動的行程與小車的穩定性。
縱向運動(圖5)由電機線軸部分和滑軌組成。通過電機轉動和線軸轉動帶動機械手臂上下平移。上下運動使用電機帶動繩索升降,電機要與線軸配合,帶動繩索轉動,繩索連接與夾取部分的裝置上。這樣通過電機的轉動就可以實現縱向運動了。此方案的優點是動作易于控制,同時大大降低了成本,所實現的效果也比較理想。控制機械臂上下運動電機轉速為44 r/min,控制取書部分左右運動的電機轉速為120 r/min.鑒于機械臂每次只需夾取一個貨物,取書部分的誤差較大(約為±5 mm左右),但仍能保證準確地取到貨物。
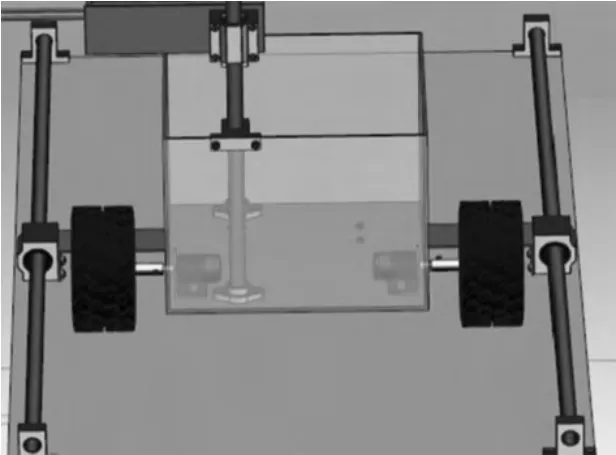
圖4 橫向移動機構
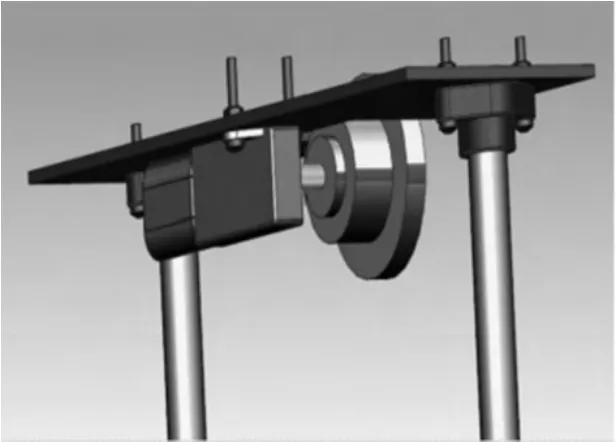
圖5 縱向移動機構
3 自動導向小車
在圖書館內進行圖書搬運和機械手定位的圖書館智能小車,也可以被稱做圖書AGV。在機器人導航系統的分析中,通常將移動機器人的工作環境分為結構化環境和非結構化環境。圖書館是一個結構化非常明顯的空間。各個書架的相對位置都是固定的,并且不會改變。所以可以使用相對成熟的固定路徑導向技術。
根據以上要求,本文設計了圖書館自動導向小車。車內部裝有電池、單片機、光電傳感器、電路板等裝置。小車利用色標開關識別路徑,準確地將書送到輸出端。小車底板與地面成傾斜30°角,能使放入的書籍整齊排列并不易滑落。設計合理的光電反饋控制其起停。
3.1 小車結構
如圖6所示,通過光電傳感器與單片機之間的信號傳輸與轉換實現對雙輪差速轉彎電動車的控制。由于直流電機具有轉動力矩大、質量小、裝配使用方便等優點,故采用空心杯直流電機。由于高速電機系統要求較高的控制精度,通過用光電傳感器尋軌的方式可以實現,并且具有原理簡單、價格低廉、性能穩定的特點,可集發射器和接收器于一體,能完成需要的信號檢測功能。
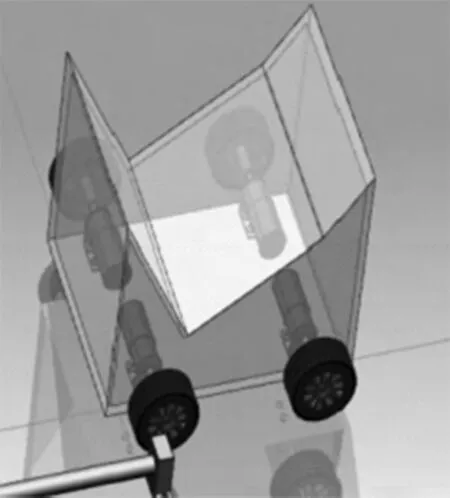
圖6 運輸車
3.2 地面制導的實現
色標開關在白色地面時輸出5 V高電平,在黑色制導帶上輸出低電平。光電開關的反應時間短,可以提高系統的控制精度。整個操作過程通過實時信息的采集和端口查詢,可實時對信號檢測與處理。
在設計運輸系統的過程中,力求線路簡潔,憑借軟件的靈活性來滿足系統設計的要求。以單片機為核心元件,光電檢測技術和軟件算法可實現電動小車在黑色軌跡上的靈活運動。運輸車采用四輪驅動,四輪電機驅動采用功率放大管,通過單片機提供的控制信號進行修改對電機的速度和轉向進行靈活簡潔地控制,使其回到黑色軌跡上運動。在運動過程中,三個固定在輪子下的反射式傳感器引導電動車沿著白色軌跡運行。當車偏離運動軌跡(超出黑線)時,反射光較弱,單片機接收到輸出的高電平,系統被迫中斷并調整兩個電機轉向,使車再次回到軌跡。車前后兩側的傳感器用來檢測小車運動過程中是否達到指定地點。此外用來檢測平衡的傳感器固定在蹺蹺板支架上,若紅外三極管因指針遮擋住傳感器中心軸而接收不到紅外光,輸出送給單片機則變為高電平,小車便停下來,說明平衡位置找到了。小車運行軌跡圖如圖7。當運輸車直線行走時(圖7(a)),光電全滅;當運輸車拐彎時(圖 7(b)),光電全亮。
4 控制系統
Arduino是一個開源的單片機電子設計平臺,其作為集成開發環境的最大特點就是簡單易用。Arduino控制板根據檢測到的紅外信號,輸出具有制定控制策略的PWM信號,調節直流電機的轉速和電機的旋轉方向,最終實現控制小車的運動軌跡。
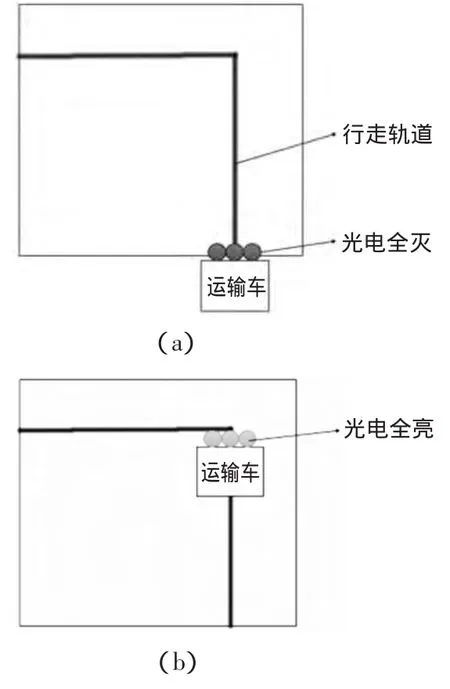
圖7 智能小車運動軌跡
取貨部分設計采用閉環系統控制,閉環部分采用光電編碼盤,連續發光的光電管不停地通過格柵,所以光電管接收端就能接收到和格柵通過頻率相同的光信號,通過光敏三極管的轉化轉為變化的電信號,從而測出取貨小車移動的速度與距離。接線圖如圖8所示。
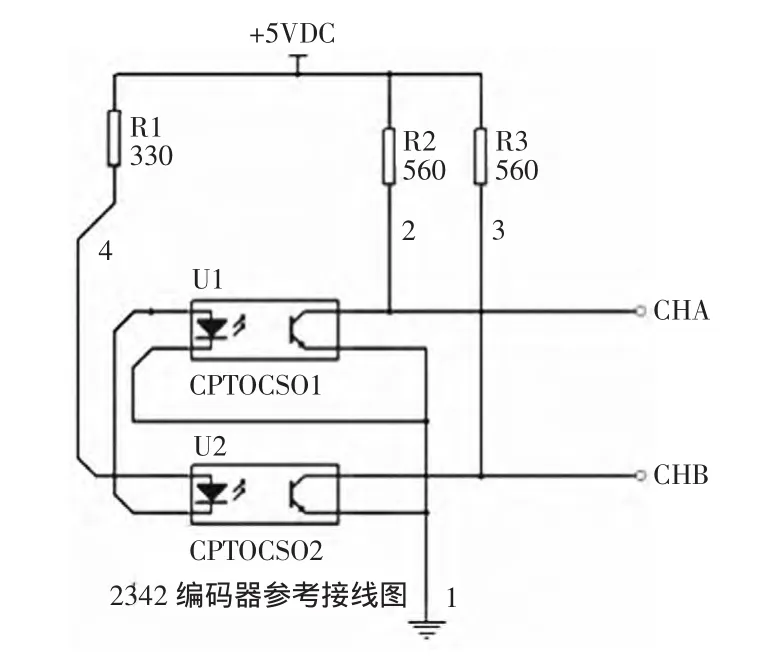
圖8 編碼器參考接線圖
采用閉環控制[6],通過小車行進距離與給定值的偏差量進行電機前進控制,通過PID算法編程調控小車平穩運行前進指定距離。部分代碼如圖9所示。
5 結論
本文設計了一種基于單片機控制的自動完成圖書上架工作的圖書館移動機器人系統,通過實際運行測試,表明功能均滿足設計要求,并且控制系統的安全可靠,操作方便,節省了勞動力,從而大大提高了工作效率。

圖9
[1] 崔建偉,宋愛國,莊皓蘭,等.機器人技術在圖書館自動化系統中的應用研究[J].機器人技術與應用,2009(6):33-35.
[2] 王晶,黃斌,陳俊華.基于PLC的圖書館作業型機器人工作系統[J].機床與液壓,2005(10):160-162,192.
[3] 沈紅兵.黃唯.圖書館書庫管理新革命——圖書館機器人管理書庫的應用研究與啟示[J].農業圖書情報學刊 2011,23(5):97-99.
[4] 孫俊,蔣昕怡,韓杰,等.圖書館機器人行走控制系統設計[J].中國電力教育,2009(15):188-190.
[5] 周晶晶,蔡錦達,錢煒,等.自助式圖書借還裝置設計[J].機械制造,2010,11:37-39.
[6] 閻勤勞,張海偉,張莉,等.溫室移動機器人系統閉環控制的實現[J].農業機械學報,2006(4):91-93.
[7] 李曉明,楊燦軍,陳鷹,等.圖書館智能小車的導引系統設計[J].激光與紅外,2000(1):56-57.
[8] 寧慧英.基于光電傳感器的智能小車自動尋跡控制系統[J].儀表技術與傳感器,2012(1):108-110.
[9] 紀欣然.基于Arduino開發環境的智能尋光小車設計[J].現代電子技術,2012(15):161-163.
[10] 王洪濤,王永亮,禹海闊,等.基于89S51單片機的智能運載車設計[J].濱州學院學報,2011(6):98-100.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
小太陽畫報(2018年1期)2018-05-14 17:19:25
制造技術與機床(2017年3期)2017-06-23 08:11:21
少年博覽·小學低年級(2016年10期)2016-11-24 06:48:23
漫畫月刊·炫版(2015年4期)2015-05-27 07:52:10
電子設計工程(2015年15期)2015-02-27 12:07:30
小天使·一年級語數英綜合(2014年8期)2014-06-26 14:42:04