基于滑模趨近律的潛空導彈垂直出水姿態控制律設計*
2015-05-08 07:42:24苗昊春馬清華嚴憲軍張愛戈
彈箭與制導學報 2015年2期
關鍵詞:設計
苗昊春,馬清華,陳 韻,嚴憲軍,張愛戈
(1 西北工業大學航天學院,西安 710072;2 中國兵器工業第203研究所,西安 710065)
基于滑模趨近律的潛空導彈垂直出水姿態控制律設計*
苗昊春1,馬清華2,陳 韻2,嚴憲軍2,張愛戈2
(1 西北工業大學航天學院,西安 710072;2 中國兵器工業第203研究所,西安 710065)
文中給出了一種滑模趨近律應用于潛空導彈垂直出水姿態控制的設計方法。首先利用四元數在彈體坐標系下對垂直出水的潛空導彈水下和空中運動建立了統一的運動方程形式,然后在縱向通道利用小擾動線性化狀態空間模型,設計了基于滑模趨近律的姿態控制律,最后建立了Simulink六自由度彈道模型并進行了數字仿真。結果表明:基于四元數的水下、水上統一的運動方程形式運行有效,基于滑模趨近律的姿態控制律可實現對潛空導彈垂直出水的有效控制。
潛空導彈;垂直出水;四元數;滑模;姿態控制
0 引言
潛空導彈對潛艇提升攻擊、威懾反潛機的主動防御能力具有重大軍事意義。國外現已研究或裝備的潛空導彈有英國“斯拉姆”、美國“西埃姆”、法國“米卡”以及德國“IDAS”等。
在潛空導彈的建模、制導控制設計和出水前后的彈體特性對比等方面研究資料較少,現有研究往往以水雷為主兼顧出水,文獻[1]對潛射導彈水下及出水運動進行建模并采用模糊PID控制方法進行了仿真分析,文獻[2]等對潛空導彈運載器建立了水下六自由度模型并進行了水彈道研究。
潛空導彈垂直出水可以360°全范圍攻擊空中目標,并可為目標探測裝置提供良好的工作條件,具有很高的戰術應用價值,文獻[3-4]對魚雷出水攻擊空中彈道進行了研究,文獻[5-6]對魚雷出水過程建立了仿射非線性模型并設計提出滑模反演控制方法,目前尚未有滑模控制方法應用于潛空導彈出水姿態控制的相關研究。
文中分別以魚雷航行力學[7]和導彈飛行力學[8]為基礎,提出了基于滑模趨近律的潛空導彈垂直出水姿態控制設計方法,首先利用四元數對導彈水下和空中運動給出了統一的運動方程形式,并在縱向通道分別建立小擾動線性化的狀態空間模型,然后設計了基于指數趨近律的滑模姿態控制律,最后給出了Simulink六自由度彈道仿真計算結果,實現了潛空導彈垂直出水的水下和空中彈道。
1 潛空導彈運動方程
潛空導彈的的動力學和運動學方程分為水下和空中兩部分,在水下時導彈相當于魚雷,其運動規律符合魚雷航行力學,在空中,其運動規律符合導彈飛行力學。
文中研究的潛空導彈以德國“交互式潛射防空武器系統(IDAS)”為藍本,軸對稱外形,正常式“X-X”氣動布局,下面建立其動力學和運動學方程。

圖1 德國IDAS外形示意圖
1.1 潛空導彈動力學方程
在以浮心為原點的雷體坐標系中建立的魚雷動力學方程和以質心為原點的彈體坐標系(定義同雷體坐標系)中建立的導彈飛行力學方程可以統一表示如下:
(1)
對于魚雷有:
(2)
(3)
(4)

對于導彈有:
(5)
Fx、Fy、Fz和Mx、My、Mz在彈體坐標系下的表達式與方程組(3)、(4)相同,但不同的是ΔG表示重力,Ri、MRi(i=x,y,z)分別表示氣動力、氣動力矩,其具體計算見文獻[8]。
1.2 潛空導彈運動學方程
魚雷的浮心和導彈的質心在地面坐標系下的運動學關系式可以統一表示如下:
(6)
(7)
其中x、y、z表示浮心或質心在地面系下的位置,?、ψ、γ分別表示俯仰、偏航、滾轉角,地面系到彈體坐標系的轉換矩陣為:
(8)
1.3 幾何關系式
攻角、側滑角計算如下:
(9)
文中研究的潛空導彈特點是垂直出水,歐拉角描述的運動方程系數矩陣、坐標轉換矩陣在俯仰角為90°時是奇異的,因此采用四元數來表示導彈的方位。
四元數與姿態角具有如下轉換關系:
(10)
(11)
由以上轉換關系可以將姿態角初值轉換為四元數數值積分初值,或者將當前解算的四元數計算姿態角用于控制指令生成。
用四元數表示魚雷繞浮心或導彈繞質心運動方程,則方程組(7)變為:
(12)
由于積分誤差的存在破壞了四元數變換的正交性,因此需要對范數進行修正:
(13)
用四元數表示地面坐標系到彈體坐標系轉換矩陣:
(14)
因此,方程組(1)、(2)、(9)、(12)、(13)即組成了四元數表示的潛空導彈動力學和運動學方程,式(10)用于賦四元數積分初值,式(11)用于解算姿態角。
2 潛空導彈運動方程線性化
潛空導彈運動方程顯然為非線性時變系統,直接用于設計控制系統是非常困難的。為了進行潛空導彈控制系統設計,控制潛空導彈實現期望彈道,需要對潛空導彈動力學和運動學方程進行簡化。假定導彈在受到小擾動時,擾動運動參數與同一時間內的未擾動運動參數相差很小(即小擾動假設),則運動方程可以進行線性化處理,在此針對魚雷和導彈直接給出線性化結果。
2.1 魚雷縱向運動狀態方程


(15)
其中:
式中的系數aij為魚雷縱向擾動運動方程式系數,計算公式見文獻[7]。
2.2 導彈縱向運動狀態方程
(16)
其中:
式中的aij為導彈縱向擾動運動方程式系數,計算公式見文獻[8]。
3 基于滑模趨近律的姿態控制律設計
文中主要研究潛空導彈的水下爬升和空中爬升兩段彈道,在此給出統一的滑模變結構設計方法。
對連續時間線性系統:
(17)
設姿態指令信號為r,則誤差為:
e=r-?
(18)
誤差變化率為:
(19)
設誤差向量E和系數向量C為:
(20)
則可以選取切換函數s為:

(21)
對該函數求導,有:
(22)
采用指數趨近律作為滑模趨近律:

(23)
其中,k是指數趨近項的系數,反映運動點從遠到近趨近滑模面的速度成相應指數規律,在趨近過程中,趨近速度從一較大值逐步減小到零,不僅縮短了運動時間,而且使運動點到達切換面時速度很小。ε是等速趨近項的系數,反映運動點趨近滑模面的恒定運動速度,到達切換面時增加等速趨近項,使趨近速度不為零[10]。二者相結合可保證運動點在有限時間內到達滑模面。
由李亞普諾夫穩定性理論易知,式(23)的滑模到達條件成立。
將式(23)代入式(22),可計算得到控制律:
εsgn(s)+ks]/B2
(24)
該控制律可用于水下和出水后的姿態控制,對于垂直出水,水下姿態指令為:
r=π/2
(25)
出水后的姿態指令信號為一組設計的姿態曲線?*,計算公式如下:
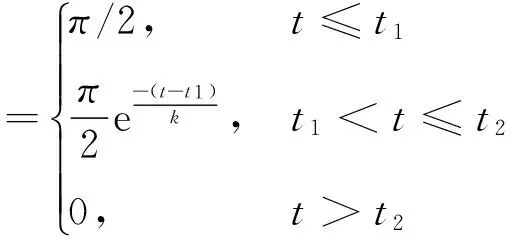
(26)
其中:t1為垂直控制結束并開始轉彎時刻;t2為轉彎結束時刻。
4 數字仿真
文中研究的潛空導彈具有巡航和增速兩級動力,并具有燃氣舵作為推力矢量控制機構,導彈從魚雷管中彈射后巡航發動機點火,導彈開始水下航行,深度為10 m,5 s后以轉水下姿態控制,俯仰角為90°,出水時刻增速發動機點火,燃氣舵工作,導彈垂直上升2.5 s后按程序姿態角轉彎。
姿態控制參數c反映對誤差的容忍程度,一般取1~20,參數k反映滑模指數趨近速度,一般取1~30,參數ε=0.1反映等速趨近速度,一般取0.01~1。經計算,潛空導彈在水下和空中兩種介質中的彈體縱向特性差別巨大,如表1所示,水下阻尼系數和時間常數遠大于空中,因此在設計姿態控制參數時,選用較大的滑模指數趨近參數k和較小的等速趨近參數ε=0.1,以獲得較快、較精確的控制效果。
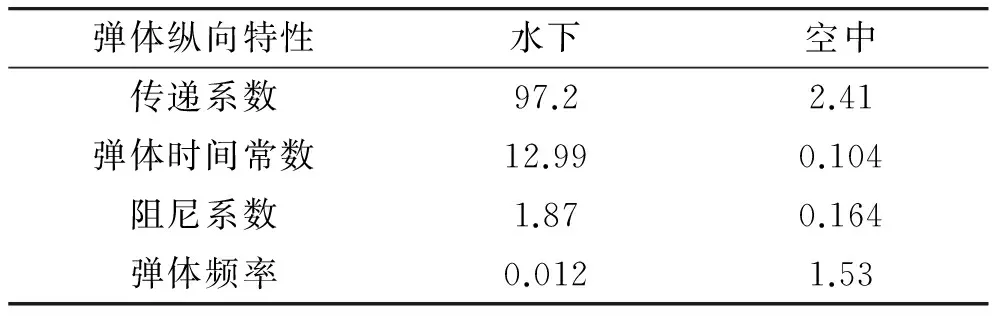
表1 彈體特性參數
水下姿態控制參數:
c=5,ε=0.1,k=10
空中姿態控制參數:
c=8,ε=0.2,k=8
依據魚雷航行力學和導彈飛行力學方程,對潛空導彈建立Matlab/Simulink六自由度彈道仿真模型,數字仿真結果如圖2~圖5所示。

圖2 高度曲線
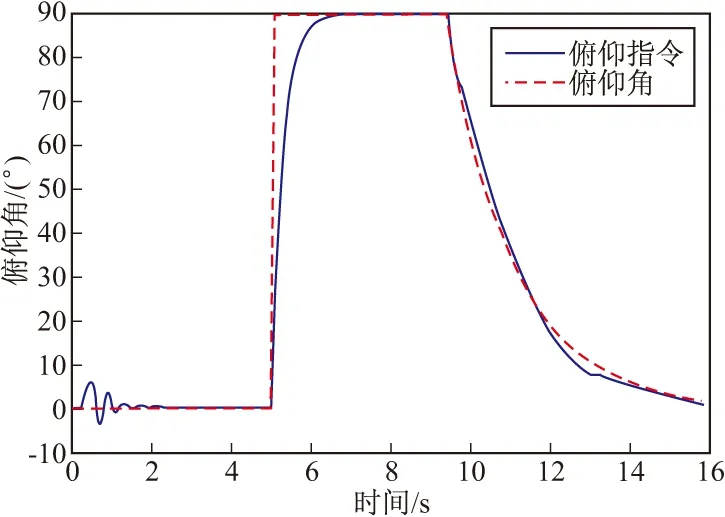
圖3 俯仰角曲線
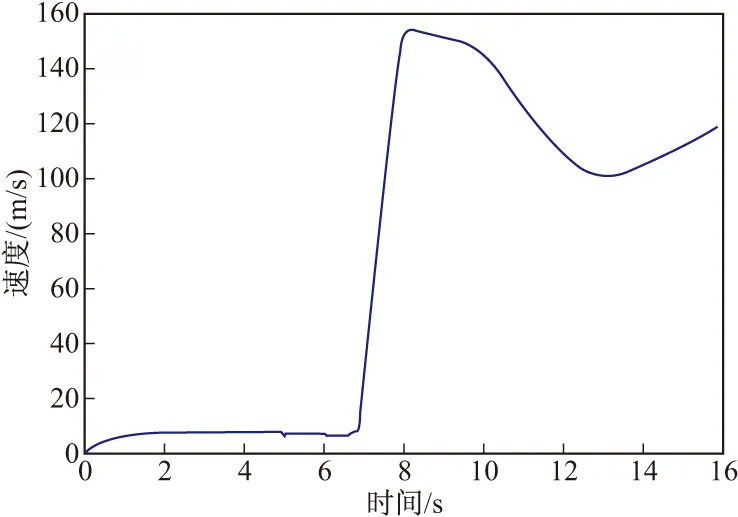
圖4 速度曲線
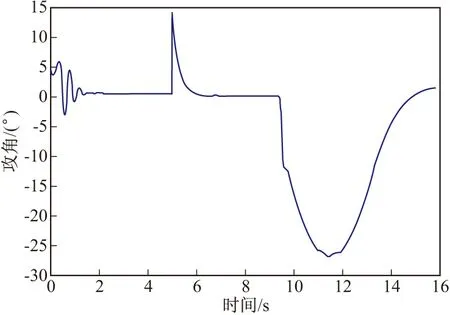
圖5 攻角曲線
仿真結果可見,導彈在水下10 m航行5 s后轉姿態控制,6.9 s垂直出水,出水時刻俯仰角為89.7°,最大攻角為14°,出水后增速發動機使速度從7 m/s迅速增加到154 m/s,9.4 s導彈結束垂直飛行開始轉彎,此時高度約300 m,15.9 s程序轉彎結束,轉彎過程中最大攻角約為-26°,最大高度720 m,轉彎結束后導彈飛行穩定,具備轉入下一階段巡航或攻擊的飛行條件。
5 結論
文中以德國“IDAS”為背景,利用四元數在彈體坐標系下對潛空導彈的水下和空中運動建立了統一的運動方程形式,并在縱向通道分別建立小擾動線性化的狀態空間模型,設計了基于指數趨近律的滑模姿態控制律,最后進行了Matlab/Simulink六自由度彈道仿真。仿真結果表明:基于四元數的水下、水上統一的運動方程簡單有效,基于滑模趨近律的姿態控制律可實現對潛空導彈水下姿態和空中姿態的有效控制。文中的工作對潛空導彈的跨介質制導控制系統研究提供了一個參考。
[1] 崔乃剛, 曹春泉, 韋常柱. 潛射導彈水下運動過程仿真分析 [J]. 彈道學報, 2009, 21(2): 95-99.
[2] 張海軍, 羅震. 潛空導彈運載器控制系統設計與仿真 [J]. 系統仿真學報, 2009, 21(23): 7585-7588.
[3] 李雨田, 張宇文, 張紀華, 等. 水雷出水攻擊空中彈道設計與分析 [J]. 魚雷技術, 2012, 20(3): 166-170.
[4] 張紀華, 張宇文, 范輝. 水雷攻擊直升機彈道設計與仿真 [J]. 魚雷技術, 2011, 19(3): 172-175.
[5] 肖敏, 史忠科. 水雷出水突變非線性滑模自適應反演彈道控制 [J]. 信息與控制, 2012, 41(6): 33-40.
[6] 肖敏, 史忠科. 水雷出水模型突變的控制方法 [J]. 自動化學報, 2012, 38(10): 1609-1617.
[7] 嚴衛生. 魚雷航行力學 [M]. 西安: 西北工業大學出版社, 2003.
[8] 錢杏芳, 林瑞雄, 趙亞男. 導彈飛行力學 [M]. 北京: 北京理工大學出版社, 2000.
[9] 張宇文. 魚雷彈道與彈道設計 [M]. 西安: 西北工業大學出版社, 1999.
Attitude Control Law Design of Vertical Water-exit of Submarine-to-air Missile Based on Sliding Mode Control
MIAO Haochun1,MA Qinghua2,CHEN Yun2,YAN Xianjun2,ZHANG Aige2
(1 School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China; 2 No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
A design method of sliding mode approaching law was applied in attitude control of vertical water-exit of submarine-to-air missile. Firstly, quaternion was used for submarine-to-air missile of vertical water-exit to establish a unified equation form of underwater and in air motion in missile’s body coordinate system, then the small perturbation linearization state space model was adopted in pitch channel to design attitude control law based on sliding mode approaching law, finally the 6-DOF trajectory simulation model in Simulink was established and simulated. The result indicates that the unified equation form of underwater and in air motion using quaternion is efficient, and attitude control law based on sliding mode approaching law is practicable in vertical water-exit control of submarine-to air missile.
submarine-to-air missile; vertical water-exit; quaternion; sliding mode; attitude control
2014-04-15
苗昊春(1986-),男,內蒙古赤峰人,工程師,博士研究生,研究方向:導彈制導與控制。
V249.1
A
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
