基于無線通訊技術的卡車變速器試驗線控制系統的設計
2015-05-11 03:12:20王信野陳書宏楊仁楓鄭德超
制造業自動化 2015年23期
王信野,陳書宏,楊仁楓,鄭德超
(中國科學院沈陽自動化研究所,沈陽 110016)
基于無線通訊技術的卡車變速器試驗線控制系統的設計
王信野,陳書宏,楊仁楓,鄭德超
(中國科學院沈陽自動化研究所,沈陽 110016)
0 引言
近年來,隨著我國工業水平的快速發展,人們對于卡車性能要求也不斷提高。變速器是卡車零部件的重要組成部分,變速器生產廠家不但對裝配水平的要求提高,而且對于變速器的測試水平也有所加強,所有變速器生產廠家對于變速器試驗線在物流運輸,氣密檢測,試驗測試,錯裝返修,試驗數據上傳等方面提出了更高的要求。
本文主要介紹某公司變速器裝配車間采用空中自行小車懸掛輸送系統的物流形式,基于無線通訊技術的變速器試驗線的控制系統的設計。應用西門子SCALANCE W無線通訊技術、倍加福RFID射頻技術等,達到試驗線的各個工位自動識別,試驗數據自動上傳,變速器與試驗數據一一綁定,道岔自動切換的設計要求。
1 試驗線的工藝布局及設計目標
1.1 工藝布局
某卡車變速器生產公司某種型號變速器試驗線主要采用空中自行小車懸掛輸送系統。工藝布局主要由注油和排油工位,氣密檢測系統,試驗臺檢測系統,返修工位,綜合性能檢測系統,上線和下線工位,附件裝配工位構成。工藝流程如圖1所示。
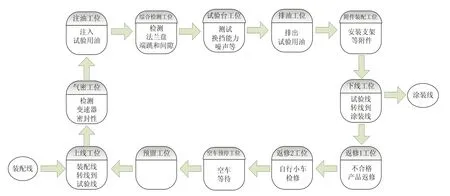
圖1 試驗線工藝流程
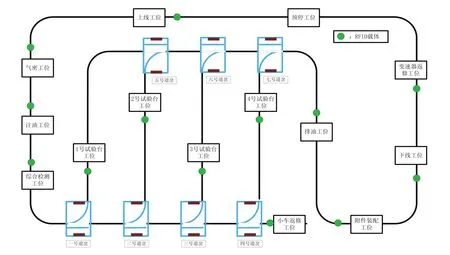
圖2 實際軌道路線圖
1.2 實際軌道線路設計
如圖2所示,本試驗線系統,主要由4臺空載試驗臺,1臺綜合檢測機組,1套注油排油過濾循環系統,1臺氣密檢測系統,幾個輔助工位構成,7個軌道線路切換道岔,12臺空中自行小車構成。每臺空再試驗臺測試試驗需要10分鐘,根據裝配線生產節拍要求每3分鐘下線一臺箱子,所以在實際軌道線路設計時采用并行4臺試驗臺同時工作的布局,每臺試驗臺工位進口和出口各放置一個軌道切換道岔,進行軌道切換,達到實際項目的設計要求。
1.3 設計目標
根據上述的實際工藝布局來建立起運行可靠,方便維護,數據可上傳的一套控制系統是很有必要的。通過西門子無線通訊技術,將自行小車,各個測試系統,各個工位與試驗線主控系統建立聯系,實現信息交互。本條試驗線控制系統主要實現以下功能:
1)自行小車自動運行,攜帶掛鉤自動升降,人工微調落位;
2)工位傳感器識別,各個測試系統自動運行測試;
3)自行小車通過RFID自動識別各個工位信息,并且測試數據與每臺箱體進 行綁定,上傳上層管理系統,實現每臺變速器測試數據可追溯;
4)主控系統通過觸摸屏可以監控每臺自行小車及各個測試系統工作狀態及故障報警信息;
5)控制系統確保快速穩定運行,實現各個工位運行節拍為3分鐘以內。
通過上述功能的實現, 達到提高試驗線自動化水平, 減少人為因素對測試過程的影響,提高生產效率的目標。
2 控制系統的設計與實現
試驗線控制系統主要由主控系統和自行小車控制系統構成。
2.1 主控系統的設計
試驗線主控系統主要功能:
1)通過自行小車反饋的位置信息,進行邏輯判斷,控制自行小車電葫蘆鏈條升降,行進電機運行與停止;2)控制軌道線路切換道岔彎道與直道位置切換;3)通過各個測試臺上傳的數據與每輛變速器進行綁定,通過以太網上傳到上層生產管理系統;
4)對小車狀態,位置信息,滑觸線供電系統,道岔切換位置進行監控和故障診斷報警。
為了實現上述功能,主控系統采用西門子最新一代PLC S7-1500 1516-3PN為控制核心,HMI TP-1200為人機交互界面,西門子無線通訊SALCANCE W788-1PRO為主控系統的接入點(AP),SALCANCE W744-1PRO為從站系統的客戶端構成以太網無線通訊網絡,試驗線各個工位采用離散分布的形式,自行小車通過RFID射頻設備識別每個工位上的RFID載體信息,然后將信息上傳到主控PLC,主控系統根據載體信息來判斷自行小車實際位置。主控系統基于SALCANCE W無線通訊網絡結構圖,如圖3所示。
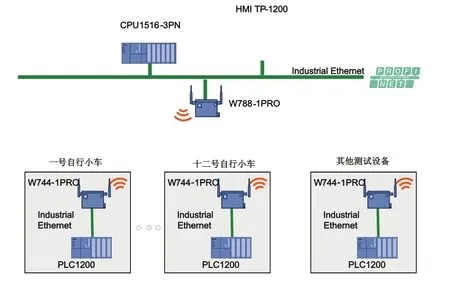
圖3 主控系統基于SALANCE W無線通訊網絡結構圖
2.2 自行小車控制系統的設計
自行小車控制系統主要實現功能:
1)由于試驗線采用離散式,工位分布通過RFID識別工位信息;
2)通過自行小車需要實現變速運行,臨近工位時需要減速運行;
3)德馬格電葫蘆實現自動升降;
4)自行小車前后車防止碰撞。
為了實現上述功能要求,自行小車系統采用西門子PLC S7-1200 1214C為從站PLC,采用倍加福RFID IQTF116識別工位信息,通過RS-485串口與從站PLC通訊;采用西門子SALCANCE W744-1PRO客戶端與主站PLC實現無線通信;采用西門子G120變頻器實現自行小車運行電機變速運行,通過CU250S控制器與小車PLC實現以太網通訊;采用I/O硬件鏈接來解決電葫蘆自動升降問題,在自行小車車頭增加光電開關和車尾增加反光板來解決前后小車碰撞問題。
自行小車控制系統網絡結構圖,如圖4所示。
2.3 試驗線控制系統的實現
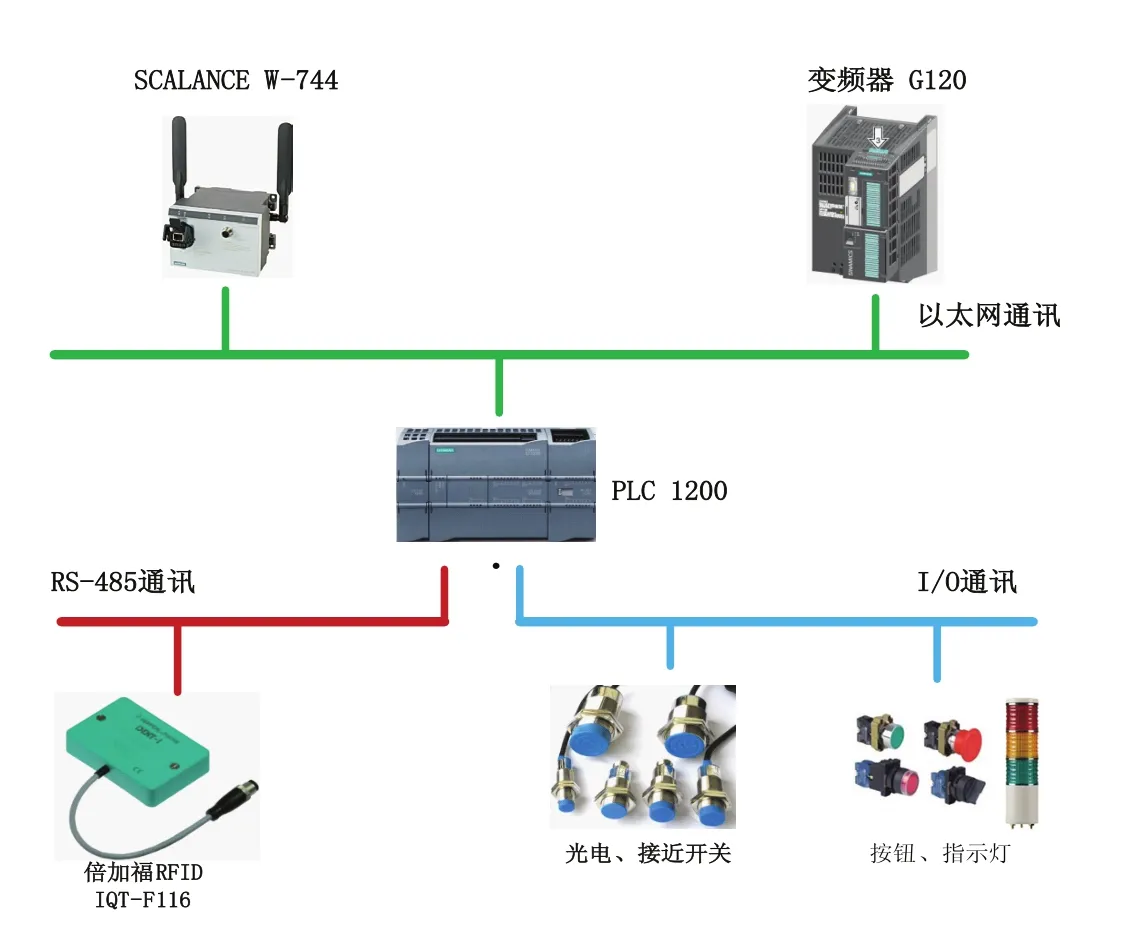
圖4 自行小車控制系統網絡結構圖
控制系統的基本控制方案和硬件選擇確定后,我們在西門子的編程軟件博途中進行硬件組態,如圖5所示。主裝配線的PLCS7-1500 1516 3PN有3個以太網口,可以連接至少32個S7通訊協議從站。首先給主站PLC,觸摸屏和從站PLC分配IP地址192.168.0.1到192.168.0.20,主站PLC以太網接口與SALCANCE W788-1PRO連接,從站以太網口與SALCANCE W744-1PRO連接,并且通過西門子專門的無線通訊軟件Firmware進行參數設置。然后通過串口調試軟件Docklight和倍加福RFID ITQ-F116一體式讀寫站,向RFID載體寫工位信息編號001-014。最后,通過西門子Starter軟件設置CU250S控制器與從站PLC的通訊協建立聯系。
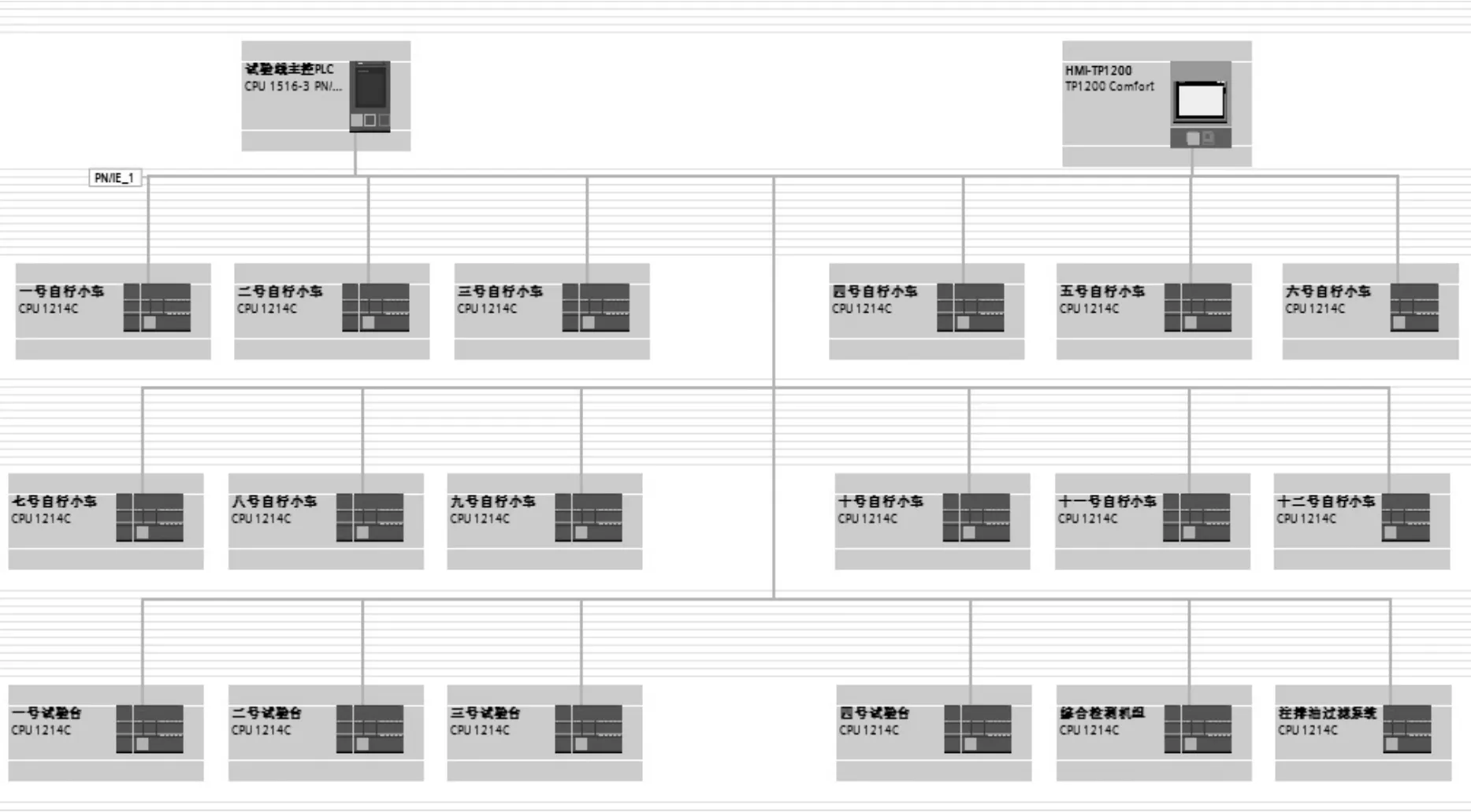
圖5 控制系統在博途軟件的硬件組態
試驗線主控系統主要分為五大模塊,分別為通訊模塊,道岔控制模塊,實時監控模塊,信息交互模塊和報警模塊。通訊模塊通過SALCANCE W無線通訊與各個自行小車從站,各個試驗設備從站建立通訊協議,實現數據交換;道岔控制模塊主要是根據各個自行小車的位置信息進行邏輯判斷控制軌道線路道岔切換;監控模塊根據自行小車上傳的信息對小車位置及運行狀態進行實時監控,對自行小車滑觸線供電系統進行實時監控,對道岔位置信息進行實時監控,信息交互模塊根據各個試驗設備試驗上傳數據與自行小車位置信息進行邏輯判斷,將每臺變速器的箱體與試驗數據進行綁定,并且上傳上層管理系統;報警系統主要給出自行小車通訊故障報警,變頻器故障報警,道岔電機故障報警,供電系統故障報警等信息。
如圖6所示,主控系統的程序流程圖,首先系統上電之后進行自檢,設備初始化之后,確保道岔運行到位,自行小車和各個在線試驗設備與試驗線主控PLC通訊流暢;然后,自行小車裝載變速器開始自動運行每個工位,將試驗臺試驗數據,氣密試驗數據,綜合檢測機組試驗數據上傳到下車自身攜帶RFID載體中,下線時統一上傳給總控PLC,在進入試驗臺測試區時需要判斷軌道道岔的位置,然后進入測試,出試驗臺測試區時同樣需要判斷運行;最后,將變速器轉線到涂裝線。
3 結束語
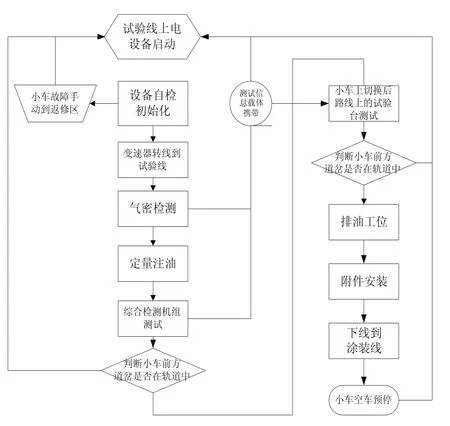
圖6 主控程序流程圖
論述了基于西門子SALCANCE W無線通訊技術來實現的卡車變速器試驗線控制系統一種設計方式。該系統可實現變速器測試信息綁定上傳,自行小車實時監控,保證試驗線的穩定、快速、安全的運行,一定程度上提高了生產效率和產品的質量。目前,系統已經應用與某卡車公司的裝配車間,如圖7所示,卡車變速器的年產量達到6萬臺, 為企業創造了良好的經濟效益。

圖7 現場應用圖片
[1]崔堅.TIA博途軟件STEP7 V11編程指南[M].機械工業出版社,2012.
[2]陳建福,王煜,孫浩,畢永全,李萌.無線通訊在自行小車中的應用[J].自動化博覽,2009,26(9):101-103.
[3]戴冠秀,劉太湖,鞏敦衛,等.PLC在運料小車自動控制系統中的應用[J].工礦自動化,2005,(6):59-61.
[4]牛毅峰.環線空中自行小車信息交換方式的應用研究[J].裝備制造技術,2009,(4):38-42.
[5]劉乃安.無線局域網(WLAN)—原理、技術和應用[M].西安電子科技大學出版社,2004.
[6]尚文利,史海波,邱文萍,何柏濤.基于RFID的混流裝配汽車生產線物料動態配送研究[J].機械設計與制造,2007,(2):157-159.
[7]鐘章隊,趙禮紅,吳昊,等.無線局域網[M].北京:科學出版社.2004.1-25.
Design of control system of truck transmission test line on wireless communication technology
WANG Xin-ye, CHEN Shu-hong, YANG Ren-feng, ZHENG De-chao
介紹了一種采用空中自行小車懸掛輸送系統的卡車變速器試驗線的控制系統,基于西門子PLC S7-1500邏輯控制,利用西門子SCALANCE W無線通訊技術數據交換,利用倍加福RFID射頻技術對離散工位進行識別,實現了變速器與試驗數據一一綁定上傳,空中自行小車懸掛輸送系統安全、穩定運行的功能。
卡車變速器;無線通訊技術;控制系統;自行小車
王信野(1986 -),男,遼寧沈陽人,助理研究員,碩士,研究方向為PLC控制及自動化技術。
TH16
A
1009-0134(2015)12(上)-0028-04
10.3969/j.issn.1009-0134.2015.23.08
2015-08-17
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
