
環保型復合式避障清潔機器人的設計
2015-05-14 08:33:28梁辰滔閆娟張浩陳榮華何濤
機械工程師 2015年10期
關鍵詞:單片機
梁辰滔, 閆娟, 張浩, 陳榮華, 何濤
(上海工程技術大學機械工程學院,上海 201620)
0 引言
由于工業發展所導致的日趨嚴峻的環境形勢以及大眾環保意識的不斷提高,傳統能源的缺點與環保主義之間的矛盾日趨尖銳,新型能源憑借其清潔、高效、可再利用性強等特點,已經逐漸走入了日常生活生產的各個領域。其中,太陽能作為典型的優秀新型能源,擁有頗具潛力的發展空間和廣闊的經濟前景。隨著科技的不斷進步與發展,結合“綠色經濟”的主流發展背景,將新型環保能源與智能家居機器裝置相結合的設計理念已經在行業中占據了主流意識,為順應發展趨勢,設計出一種能夠有效利用綠色環保資源的清潔機器人。
1 清潔機器人整體控制設計方案
清潔機器人整體設計由控制模塊、驅動模塊、傳感器模塊以及電源模塊等模塊以及提供輔助功能的顯示器、按鈕開關等外圍器件組成,各部分由C52單片機控制指揮,協調配合工作。
1)控制芯片。采用STC89C52RC作為控制核心,將各模塊與器件聯系起來,通過程序的運行控制各個模塊的運行與配合。
2)數據顯示器。由一組四位共陽數碼管組成,用于直觀反映機器人的工作參數。
3)電機驅動。由行進驅動和滾刷驅動兩部分組成,行進驅動負責控制機器人兩后輪的運動,滾刷驅動負責清潔裝置部分的滾刷工作。
4)傳感器組。由于采用復合式避障方式,故機器人使用超聲波傳感器與輕觸開關組成傳感器組,超聲波傳感器部分負責機器人前方范圍內的避障探測,而輕觸開關負責機器人四周及后方的避障檢測,提高機器人避障的穩定性。
5)供電電源。由一塊太陽能電池板以及兩塊蓄電池組組成,兩塊蓄電池組分別負責驅動與滾刷電機的供電。
2 清潔機器人硬件系統設計
2.1 控制模塊
主控部分以STC89C52單片機為核心,通過I/O信號口與傳感器、驅動電路、按鍵開關等相連接,工作時負責接收來自超聲波傳感器以及輕觸開關傳送的數據信息,進行分析處理,然后將具體的工作數據通過數碼管直觀反饋到用戶端,同時通過PWM端使驅動電路對行進電機與滾刷電機以及舵機進行控制,達到避障、清掃的目的。
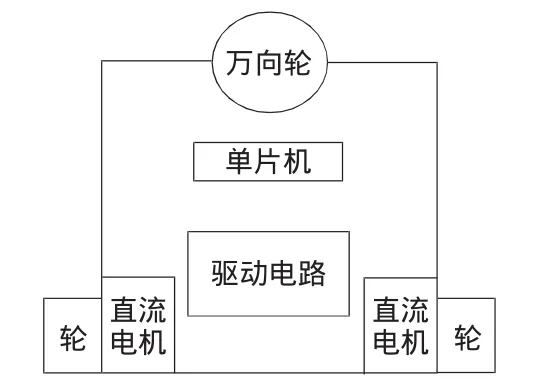
圖1 智能清潔機器人驅動模塊原理示意圖
2.2 驅動模塊
驅動模塊的電路設計上采用L298N雙H橋直流電機驅動芯片,穩定性高,采用鋁電解電容,使電路穩定工作。可以直接驅動兩路直流電機,并提供了5 V輸出接口(輸入最低只要6 V),可以給5 V單片機電路系統供電(低紋波系數),支持3.3V MCU控制,可以由單片機模擬PWM信號控制兩后輪的速度與方向。圖1為驅動模塊原理示意圖。
機械結構設計上采用兩個直流電機后驅,結合前萬向輪的方式完成裝置的運動,這樣設計的優點在當兩直流電機反向轉動的時候,帶動前萬向輪即可實現較小位移范圍內的轉向,提高機器人在狹小空間內的運動能力。
2.3 傳感器模塊
傳感器模塊由一個超聲波傳感器與多個輕觸開關組成,其中,超聲波傳感器安裝在舵機上,并用固定支架將其固定于機器人前端,通過舵機的轉動以及超聲波傳感器測距相結合,實時探測機器人前端180°范圍內的工作環境,后方及兩側的輕觸開關在超聲波傳感器無法精確處理機器人后方位置狀態的時候,起到一個保證其正常安全工作的作用。同時由一組四位共陽數碼管組成數據顯示器,通過單片機處理,實時反饋顯示超聲波傳感器的測距數據,便于裝置的調試與檢測。
2.4 電源模塊
電源模塊采用兩塊7.2 V鎳氫可充電池以及一塊太陽能電池板組成,其中太陽能電池板安裝在機器人頂部通過充電電路與其中一塊鎳氫可充電池連接,這樣,當清潔機器人在太陽能電池板的工作條件下工作時,太陽能轉化為鎳氫電池的電能儲存起來,由另一塊電池為清潔機器人供電,當環境不適合太陽能電池板工作時,用波動開關將電路切換到由備用鎳氫電池供電的電路,保證機器人的正常工作供電。
2.5 清潔模塊
采用滾筒式毛刷和海綿吸液裝置復合工作方式,海綿吸液裝置部分置于機器人底部,采用PVA高密度吸水海綿,液體處理能力更加出色,滾筒由一個直流電機通過齒輪組連接帶動工作,和收集器一起由固定件安裝在裝置底部中間的主要工作位置,滾筒毛刷采用防靜電尼龍材質毛刷,耐磨損,不附塵,這樣的復合裝置既能掃除干燥雜物,又能吸收處理液體污物,提高清潔效率與質量,在面對復雜工作條件時能發揮更好的作用。圖2為系統機構圖。
3 清潔機器人軟件系統設計
在實際工作環境下,先按下機器人開關,舵機先執行歸中程序將超聲波傳感器正對機器人前方工作區,清潔模塊根據環境條件調控選擇至太陽能電池或蓄電池供電方式,同時滾刷開始由電機帶動工作,由超聲波傳感器對前方進行測距,將相關數據輸入單片機處理,并將處理結果數據反饋之數碼管顯示,當清潔機器人與前方障礙物距離大于安全距離時,機器人前進并開始工作,海綿裝置吸收處理地面液體污物,碎紙細屑則由滾筒毛刷卷入其后的收集器中,超聲波傳感器保持對前方的測距處理,當超聲波傳感器檢測到前方障礙物小于安全距離時,機器人開始執行避障程序:用延時函數控制其短暫后退一小距離然后停止,超聲波傳感器隨舵機由單片機進行PWM控制轉動,對機器人前方180°角范圍進行障礙測距,經程序檢測分析,若機器人與兩邊障礙均大于安全距離,則向距離更遠的一方保持原地轉向(兩直流電機相反向轉動)后前進。若只有一方小于安全距離,則轉向另一方后前進。若與兩邊障礙均小于安全距離,則沿原路后退一小段距離后再次進行如上方式測距,直至安全距離。當檢測到前方距離小于安全距離的時候,進入到中斷服務函數,停止前進并對前方180°范圍進行測距處理,或當內部定時器時間到的時候,保持前進并對前方180°范圍進行測距處理。主程序流程圖如圖3所示。
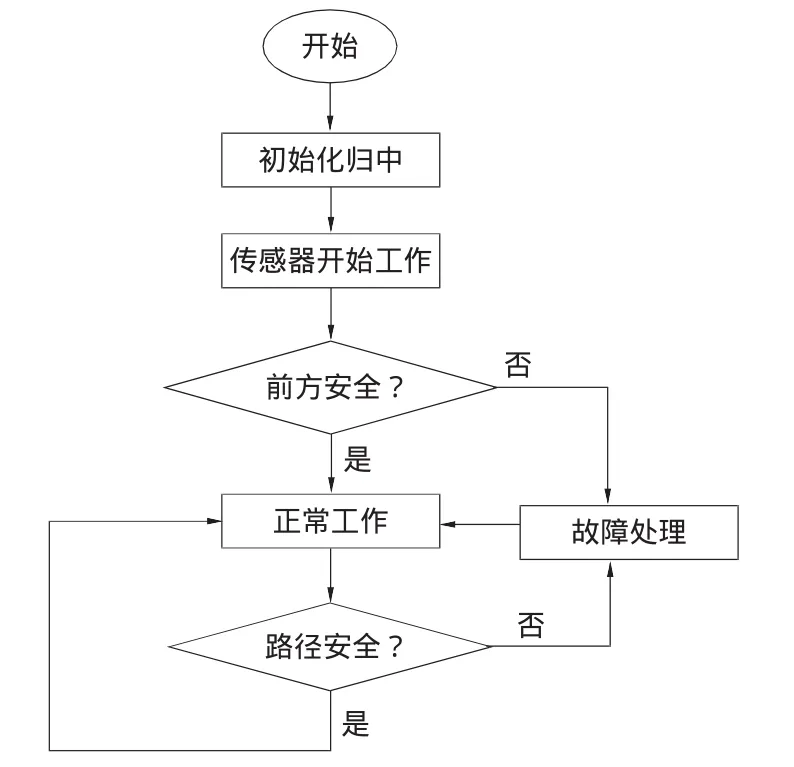
圖3 主程序流程圖
4 結語
提出了一種基于STC89c52為控制核心,以小車為運動載體,有效利用環保太陽能,采取多傳感器組合避障的智能清潔機器人設計,其電源模塊設計,既滿足清潔機器人的工作條件,又符合現代環保科技的觀念,是未來可能形成的一種發展趨勢,可進一步通過添加電池電壓檢測模塊、太陽能檢測模塊等等,進一步優化配置程序,使之做到自動根據環境因素調節選擇供電方式。本機器人避障程序邏輯清楚實用,能夠及時避開障礙物,提高了清潔機器人的工作效率與穩定性,但路徑較為無規律,適用于簡單理想環境,若工作于復雜環境之下,可考慮加入更高精度路徑規劃,如沿內螺旋式“回”字型路徑、區域遍歷算法等。
[1] 曹建樹,曾林春,靳志杰.室內智能清潔機器人控制系統設計[J].機械與電子,2009(6):60-63.
[2] 曾岑,陳進,蔣玉杰.智能型室內清潔機器人的研究和發展探析[J].機械制造,2008,46(530):63-67.
[3] 梁喜鳳.室內地面清潔機器人路徑規劃[J].中國計量學院學報,2006,17(1):64-68.
[4] 劉天釗.基于單片機智能機器人的設計[J].科技信息,2012(36):477-478.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
