
一類飛行器動(dòng)態(tài)變化加速度模擬試驗(yàn)原理探索
2015-05-28 08:19:48張東鋒歐峰
裝備環(huán)境工程 2015年5期
張東鋒,歐峰
(中國工程物理研究院 總體工程研究所,四川 綿陽 621900)
導(dǎo)彈、飛機(jī)等飛行器從發(fā)射起飛至下降著陸等過 程中都會(huì)承受持續(xù)加速度載荷,該持續(xù)加速度載荷的一類典型地面模擬方法是通過離心機(jī)實(shí)現(xiàn)的。若該持續(xù)載荷從某種典型特征面截取,則稱之為穩(wěn)態(tài)加速度模擬試驗(yàn),模擬過程中飛行器與離心機(jī)的相對(duì)位置保持不變。如果需要模擬飛行器的連續(xù)動(dòng)態(tài)變化,通常需要在離心機(jī)上安裝常平架進(jìn)行動(dòng)態(tài)控制,稱之為離心機(jī)連續(xù)動(dòng)態(tài)模擬系統(tǒng)[1]。若加速度變化率大,則稱為高動(dòng)態(tài)模擬系統(tǒng)。從設(shè)備研發(fā)角度而言,模擬時(shí)輸入角速度或角加速度可以實(shí)現(xiàn)某特定點(diǎn)的目標(biāo)加速度,力學(xué)理論上稱之為運(yùn)動(dòng)學(xué)正問題[2—5],而加速度模擬試驗(yàn)原理研究卻屬于運(yùn)動(dòng)學(xué)逆問題范疇。運(yùn)動(dòng)學(xué)逆問題存在多值性和對(duì)初值的依賴性,比正問題復(fù)雜得多,目前主要集中在機(jī)器人領(lǐng)域,關(guān)于多軸運(yùn)動(dòng)研究較少。
文中首先針對(duì)研發(fā)的特殊高動(dòng)態(tài)模擬系統(tǒng)建立三軸高動(dòng)態(tài)加速度模擬系統(tǒng)的數(shù)學(xué)模型,從運(yùn)動(dòng)學(xué)正問題出發(fā),探討試件加速度與模擬系統(tǒng)各主要結(jié)構(gòu)部件的角加速度、角速度及旋轉(zhuǎn)角度之間的關(guān)系。通過反解方程,得到所需的角速度、角加速度及旋轉(zhuǎn)角度,最后運(yùn)用Matlab對(duì)雙軸運(yùn)動(dòng)簡例進(jìn)行仿真分析。
1 數(shù)學(xué)模型
不同需求的加速度動(dòng)態(tài)模擬系統(tǒng)中,常平架的安裝方式也不同。如土工離心機(jī)中使用吊斗,在不同加速度載荷下離心機(jī)半徑會(huì)動(dòng)態(tài)改變,但不能人為控制吊斗,屬于一種雙軸模擬系統(tǒng)。飛行員和飛行器模擬系統(tǒng)通常使用內(nèi)、中、外框等動(dòng)量矩框架以及離心機(jī)轉(zhuǎn)軸共同構(gòu)成多軸旋轉(zhuǎn)系統(tǒng)。文中研究一種特殊的離心機(jī)動(dòng)態(tài)模擬系統(tǒng),其常平架某轉(zhuǎn)軸始終與離心機(jī)轉(zhuǎn)軸方向相同,模擬系統(tǒng)外觀如圖1所示。該系統(tǒng)固定了三軸模擬系統(tǒng)的兩軸方向,第三方向上試件可以自旋。動(dòng)態(tài)模擬系統(tǒng)數(shù)學(xué)模型的幾何描述與相關(guān)坐標(biāo)系如圖2所示。
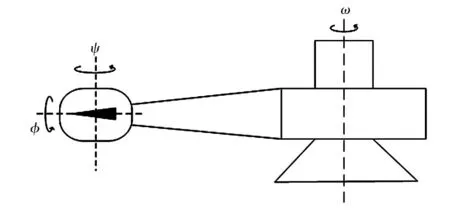
圖1 某動(dòng)態(tài)模擬系統(tǒng)Fig.1 Sketch map of simulation system with three-axial variable accelerations
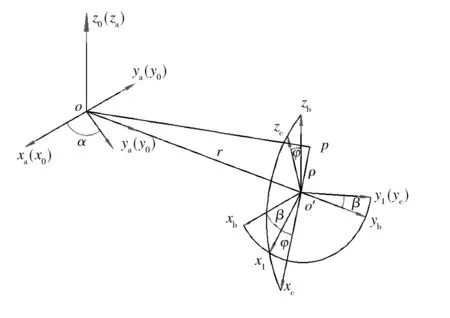
圖2 動(dòng)態(tài)模擬系統(tǒng)的數(shù)學(xué)模型Fig.2 Mathematical model of simulation system with three-axial variable accelerations
2 三軸加速度模型運(yùn)動(dòng)方程的建立
2.1 三軸加速度模型及相關(guān)坐標(biāo)系
三軸加速度模型如圖2所示,其中S0為慣性坐標(biāo)系,Sa為與離心機(jī)固連的坐標(biāo)系,S0,Sa的原點(diǎn)為o點(diǎn)。在離心機(jī)旋轉(zhuǎn)研究中,通常以Sa坐標(biāo)系代替S0坐標(biāo)系進(jìn)行慣性系研究,Sb為吊籃處與離心機(jī)固連的坐標(biāo)系,它與Sa相差一臂長,記為矢量r。實(shí)際可以認(rèn)為是同一坐標(biāo)系,Sc是與常平架固連的坐標(biāo)系,通常與飛行器固連,為本體坐標(biāo)系,Sc與Sb的原點(diǎn)為常平架中心o′點(diǎn)。Sc是通過Sb先繞z軸旋轉(zhuǎn)β,再繞y軸旋轉(zhuǎn)φ實(shí)現(xiàn)的,旋轉(zhuǎn)順序表示為[6—9]:

式中:Az(β),Ay(φ) 為旋轉(zhuǎn)矩陣;S1為中間過渡坐標(biāo)。從Sa到Sc的轉(zhuǎn)換矩陣Aca為:
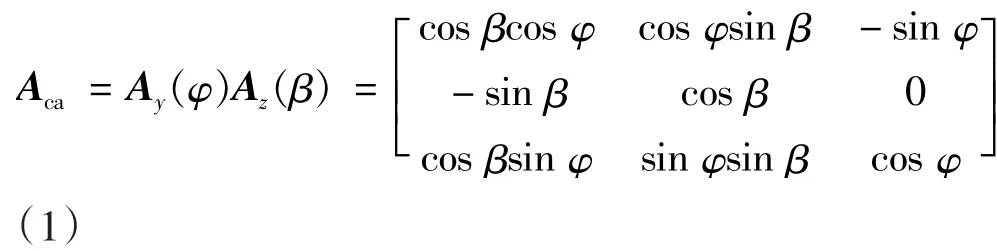
記從Sc到Sa的轉(zhuǎn)換矩陣為Aac。
2.2 相對(duì)角速度、相對(duì)角加速度
相對(duì)于本體坐標(biāo)系的角速度矢量可以表示為[10—14]:

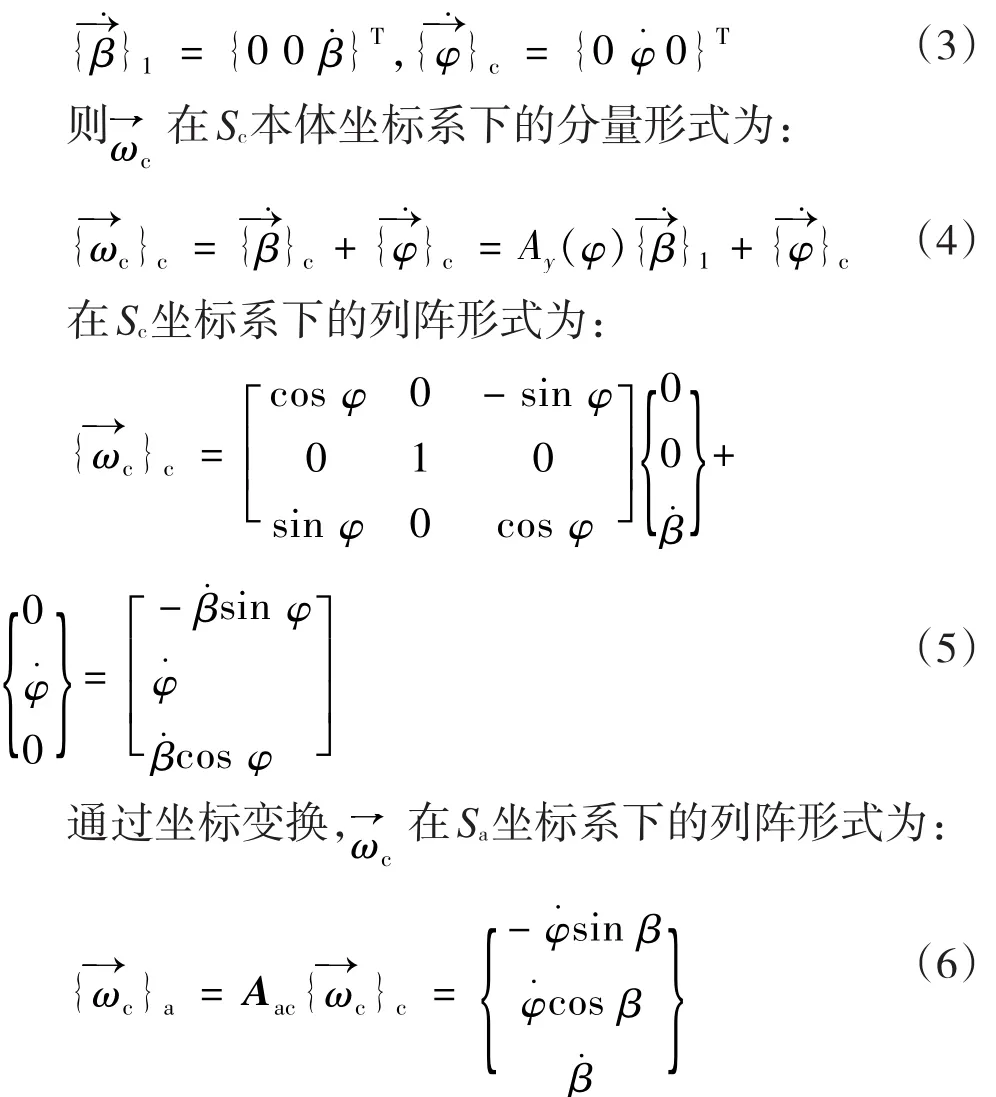
相對(duì)角加速度Sc坐標(biāo)系下的列陣形式為:
2.3 三軸加速度模型的建立

慣性坐標(biāo)系下的速度及加速度矢量為:
因?yàn)镾a坐標(biāo)平移加速度式(10)整理為公式(11):

離心機(jī)旋轉(zhuǎn)的角速度在Sa坐標(biāo)系下的矢徑表示為{為其在Sa坐標(biāo)系下的叉乘矩陣,為其在Sc坐標(biāo)系下的叉乘矩陣,角加速度也同樣表示,記為{Sc坐標(biāo)系原點(diǎn)點(diǎn)在Sa坐標(biāo)系下的矢徑表示為變 矢 量為了簡化公式,將 Sa坐標(biāo)系下的分量記為的位置矢量在Sa坐標(biāo)系下的列式為:,則式(8)表示


式(12)的絕對(duì)加速度在Sa坐標(biāo)系下的列式為:
式(14)表示的加速度在x,y,z三個(gè)方向都存在偏移,試驗(yàn)中最常見的情況為z向、x向偏移設(shè)為0,僅僅

存在自轉(zhuǎn)軸y向的偏移量,那么:


則(14)式改為:
通常試驗(yàn)中Sc坐標(biāo)系下的絕對(duì)加速度已知,則Sc坐標(biāo)系和Sa坐標(biāo)系兩坐標(biāo)系下的絕對(duì)加速度轉(zhuǎn)換公式為:
式(17)為三軸旋轉(zhuǎn)時(shí)需要求解的微分方程,復(fù)雜問題需要求解該方程。為了算例簡單,不考慮偏移量,即變矢量,同時(shí)不考慮重力加速度的影響,則φ=0。式(17)簡化為:

簡化公式為求解每時(shí)刻的圓周運(yùn)動(dòng)和試件轉(zhuǎn)角。為了避免無解和多值波動(dòng),下面算例中將式(18)的角加速度作線性化處理,將方程轉(zhuǎn)換為代數(shù)方程,計(jì)算時(shí)先聯(lián)立求解角速度和角加速度,最后求解試件的旋轉(zhuǎn)角度。
3 算例
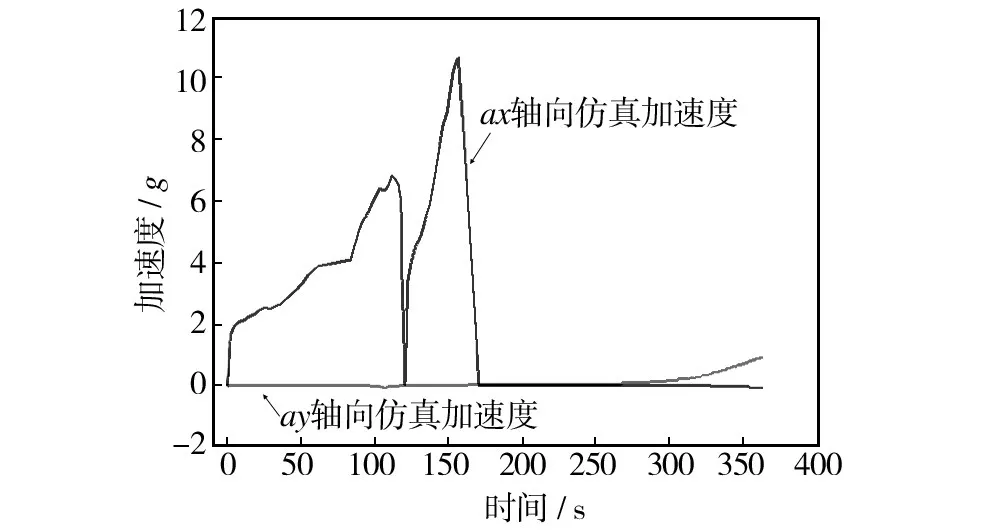
圖3 試件軸向和橫向目標(biāo)加速度變化曲線Fig.3 Axial and transverse project accelerations
文中算例同時(shí)具有軸向和法向加速度,算例中機(jī)臂長r=3.5 m,軸向及法向目標(biāo)加速度同時(shí)隨時(shí)間的變化曲線如圖3所示。試驗(yàn)時(shí)需要同時(shí)實(shí)現(xiàn)軸向和法向加速度動(dòng)態(tài)變化,并且在整個(gè)試驗(yàn)過程中反映軸向和法向加速度劇烈的動(dòng)態(tài)變化。
通過Matlab求解[15]處理后的方程(18),離心機(jī)旋轉(zhuǎn)角速度和試件旋轉(zhuǎn)角度如圖4和圖5所示。圖5說明當(dāng)軸向值趨近0時(shí),橫向目標(biāo)的微小變化需要通過較大轉(zhuǎn)角變化來實(shí)現(xiàn)。通過計(jì)算獲得的離心機(jī)角速度和試件轉(zhuǎn)角模擬仿真軸向加速度和橫向加速度與目標(biāo)加速度比較如圖6所示。從圖6a中可見,當(dāng)加速度經(jīng)劇烈變化到突然長時(shí)間變?yōu)?時(shí),由于離心機(jī)的角加速度始終處于趨近于0的狀態(tài),橫向模擬值與目標(biāo)橫向加速度存在0.07g的差值。從整體上以及圖6b所示的橫向加速度可知,能夠很好地模擬軸向和橫向的動(dòng)態(tài)變化加速度。
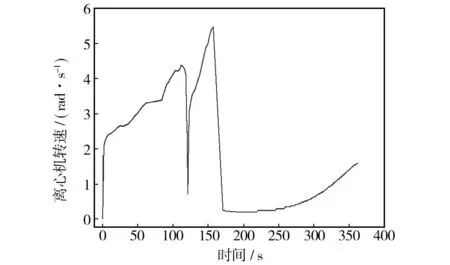
圖4 離心機(jī)角速度隨時(shí)間變化曲線Fig.4 Angular velocity of centrifuge
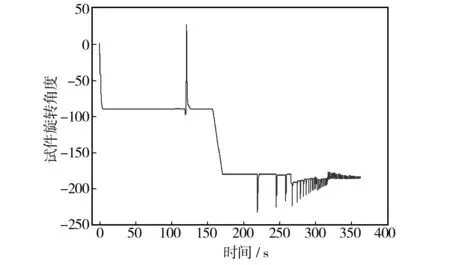
圖5 試件旋轉(zhuǎn)角度隨時(shí)間變化曲線Fig.5 The changing curve of rotation angle of product over time
4 結(jié)語

圖6 試件模擬值與目標(biāo)加速度比較Fig.6 Comparison of transverse simulated value and objective acceleration
文中通過建立三軸動(dòng)態(tài)變化加速度模擬系統(tǒng)的數(shù)學(xué)模型,從運(yùn)動(dòng)學(xué)正問題出發(fā),建立了試件目標(biāo)加速度與模擬系統(tǒng)各驅(qū)動(dòng)結(jié)構(gòu)的角加速度、角速度之間的關(guān)系,通過Matlab反解方程,并對(duì)方程進(jìn)行線性化處理,減小初值的影響和多值性的影響,得到所需的角速度和試件旋轉(zhuǎn)角度,最后對(duì)雙軸運(yùn)動(dòng)簡例進(jìn)行仿真分析,仿真結(jié)果表明反解方程進(jìn)行動(dòng)態(tài)加速度模擬試驗(yàn)是可行的。
[1]賈普照.穩(wěn)態(tài)加速度試驗(yàn)?zāi)M設(shè)備——離心機(jī)理論與設(shè)計(jì)[M].北京:國防工業(yè)出版社,2013.JIA Pu-zhao.The Design of a Steady State Acceleration Simulation Test Equipment-Centrifuge[M].Beijing:National Defence Industry Press,2013.
[2] 由俊生,由勇,許敘遙,等.殲擊機(jī)飛行員三軸加速度過載建模與仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2006,18(S2):28—30.YOU Jun-sheng,YOU Yong,XU Xu-yao,et al.Research for Modeling and Simulation of Pilot Three Shaft Acceleration[J].Journal of System Simulation,2006,18(S2):28—30.
[3] 馬杰,姚郁.一種新型動(dòng)態(tài)飛行過載模擬器及其運(yùn)動(dòng)學(xué)分析[J].系統(tǒng)仿真學(xué)報(bào),2009,21(S2):112—114.MA Jie,YAO Yu.Kinematics Analysis of a New Flight Acceleration simulator[J].Journal of System Simulation,2009,21(S2):112—114.
[4] 馬智周.三軸運(yùn)動(dòng)模擬轉(zhuǎn)臺(tái)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)[J].航空精密機(jī)械工程,1988(3/4):28—34,9—13.MA Zhi-zhou.Kinematics and Dynamics of Three-axial Motion Simulated Turnable[J].Aviation Precision Manufacturing Technology,1988(3/4):28—34,9—13.
[5] 潘文俊,王立新.持續(xù)載荷飛行模擬器過載模擬新原理[J].航空學(xué)報(bào),2010,31(11):2159—2164.PAN Wen-jun,WANG Li-xin.Principles of G-load Simulation for a Novel Sustained-G Flight Simulator[J].Acta Aeronautica et Astronautica Sinica,2010,31(11):2159—2164.
[6] 趙育善,師鵬.航天器飛行動(dòng)力學(xué)建模理論與方法[M].北京:北京航空航天大學(xué)出版社,2012.ZHAO Yu-shan,SHI Peng.The Modeling and Method of the Flight Dynamics on Space Shuttle[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2012.
[7]肖業(yè)倫.航空航天器運(yùn)動(dòng)的建模——飛行動(dòng)力學(xué)的理論基礎(chǔ)[M].北京:北京航空航天大學(xué)出版社,2003.XIAO Ye-lun.The Modeling of Aerospace Vehicle-The theory of The Flight Dynamics[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2003.
[8] 袁惠群.轉(zhuǎn)子動(dòng)力學(xué)基礎(chǔ)[M].北京:冶金工業(yè)出版社,2013.YUAN Hui-qun.The Foundation of Rotor Dynamics[M].Beijing:Metallurgy Industry Press,2013.
[9] 徐明友,丁松濱.飛行動(dòng)力學(xué)[M].北京:科學(xué)出版社,2003.XU Ming-you,DING Song-bin.The Dynamics of Flight[M].Beijing:Science Press,2003.
[10]賈書惠.剛體繞定點(diǎn)運(yùn)動(dòng)中的角速度和角加速度[J].力學(xué)與實(shí)踐,1991,13(6):50—53.JIA Shu-hui.The Angular Velocity and Acceleration for Rotation of Rigid Body with one Fixed Point[J].Mechanics in Engineering,1991,13(6):50—53.
[11]李向榮,蔡屹立,潘紅萍.剛體繞定點(diǎn)運(yùn)動(dòng)的角加速度合成公式[J].力學(xué)與實(shí)踐,1989,11(5):68—69.LI Xiang-rong,CAI Yi-li,PAN Hong-ping.The Angular Acceleration Compound Formula of Rigid Body Around a Fixed Point Motion[J].Mechanics in Engineering,1989,11(5):68—69.
[12]陳勇.剛體在復(fù)合運(yùn)動(dòng)中角速度、角加速度合成定理[J].貴州師范大學(xué)學(xué)報(bào)(自然科學(xué)版),2000,18(4):89—90.CHEN Yong.The Angular Velocity and Acceleration Composing Theorem of rigid body in compound motion[J].Journal of Guizhou Normal University(Natural Science Edition),2000,18(4):89—90.
[13]張獻(xiàn)圖.四重轉(zhuǎn)動(dòng)參考系與質(zhì)點(diǎn)的運(yùn)動(dòng)[J].河南教育學(xué)院學(xué)報(bào)(自然科學(xué)版),1997,6(1):33—36.ZHANG Xian-tu.The Motion of Four Rotation Reference Frame and Material Point[J].Journal of Henan Institute of Education(Natural Science Edition),1997,6(1):33—36.
[14]CHEN Wan-chun,XIAO Ye-lun.Relationship for Motion When Described in Any Two Rotational Reference Frames[J].Chinese Journal of Aeronautics,1999,12(4):40—43.
[15]敖文剛,杜力,黃勇剛,等.基于MATLAB的運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)過程分析與模擬[M].北京:科學(xué)出版社,2013.AO Wen-gang,DU Li,HUANG Yong-gang,et al.Application of Matlab to Process Analysis and Simulation of Kinematics and Dynamics[M].Beijing:Science Press,2013.
