動量輪誘導(dǎo)的衛(wèi)星地面微振動特性研究以及在軌仿真分析
2015-05-28 08:19:18楊新峰白照廣楊棟李艷輝
裝備環(huán)境工程 2015年3期
關(guān)鍵詞:振動
楊新峰,白照廣,楊棟,李艷輝
(航天東方紅衛(wèi)星有限公司,北京 100094)
星上活動部件在軌工作時(shí)會誘發(fā)衛(wèi)星低量級的擾振,這種低量級的振動有可能影響衛(wèi)星有效載荷如遙感相機(jī)的成像質(zhì)量[1—2]。引起星上微振動的干擾源有很多種,如動量輪、陀螺、數(shù)傳天線、機(jī)械制冷機(jī)、冷熱交變等[3—9],對成像質(zhì)量產(chǎn)生較大影響的干擾源主要為動量輪。文獻(xiàn)[4]報(bào)導(dǎo)地面測量的某衛(wèi)星動量輪微振動量級約為9.3×10-2g,文獻(xiàn)[8]報(bào)導(dǎo)SPOT-4衛(wèi)星在軌動量輪微振動量級約為1×10-2g,文獻(xiàn)[9]報(bào)導(dǎo)某遙感衛(wèi)星在軌動量輪微振動量級約為23.5×10-2g,而輻射計(jì)微振動量級約為57×10-2g。當(dāng)前在衛(wèi)星微振動的研究中開展了不少地面微振動試驗(yàn),獲得了不同轉(zhuǎn)動部件產(chǎn)生的星上地面微振動加速度量級,但轉(zhuǎn)動部件引起的星上微振動傳遞特性規(guī)律還有很多方面沒有探索清楚,如轉(zhuǎn)動部件與衛(wèi)星結(jié)構(gòu)的耦合、試驗(yàn)邊界的影響、同時(shí)與分別轉(zhuǎn)動的差異、非穩(wěn)定轉(zhuǎn)動特性以及傳遞路徑的差異等。在衛(wèi)星微振動仿真分析方面,由于衛(wèi)星地面試驗(yàn)很難真實(shí)模擬衛(wèi)星在軌狀態(tài)(如邊界條件、太陽翼的展開狀態(tài)等),因此,整星地面微振動測量數(shù)據(jù)還較少用于衛(wèi)星微振動仿真分析的模型修正或驗(yàn)證,大多數(shù)微振動在軌仿真分析使用的是轉(zhuǎn)動組件的數(shù)學(xué)理論模型[1,4]或轉(zhuǎn)動組件的單獨(dú)試驗(yàn)測試數(shù)據(jù)[10—13],衛(wèi)星整星在軌狀態(tài)的微振動仿真分析與地面試驗(yàn)還存在一定的脫節(jié)。
針對上述問題,文中對某型號衛(wèi)星開展星上多個動量輪在不同轉(zhuǎn)速下的微振動特性研究,總結(jié)分析動量輪與衛(wèi)星結(jié)構(gòu)的耦合影響、衛(wèi)星邊界的作用以及微振動傳遞特性等問題,并基于衛(wèi)星地面微振動試驗(yàn)數(shù)據(jù)開展衛(wèi)星微振動仿真分析。
1 地面微振動試驗(yàn)
1.1 試驗(yàn)設(shè)置
某初樣衛(wèi)星在不同位置安裝了4個動量輪,如圖1所示。動量輪分別安裝在衛(wèi)星底板、平臺艙隔板、衛(wèi)星中板和載荷艙隔板上,從底部向上依次叫做動量輪A、動量輪B、動量輪C和動量輪D。衛(wèi)星的頂部安裝有相機(jī)系統(tǒng),在該次衛(wèi)星微振動試驗(yàn)中,相機(jī)為結(jié)構(gòu)模擬件。在各動量輪以及相機(jī)附近安裝微振加速度測點(diǎn)。其中動量輪A、動量輪B、動量輪C和動量輪D處的測點(diǎn)分別為AC01—AC04,相機(jī)次鏡、相機(jī)根部和相機(jī)支架上的測點(diǎn)分別為AC05—AC07。
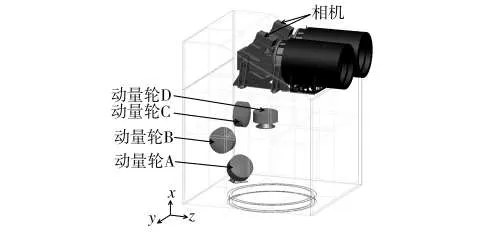
圖1 微振動試驗(yàn)衛(wèi)星Fig.1 A satellite for micro-vibration testing
在微振動試驗(yàn)中,衛(wèi)星不安裝太陽翼,按固支和懸吊兩種狀態(tài)進(jìn)行動量輪轉(zhuǎn)動的微振動環(huán)境測試。衛(wèi)星固支狀態(tài)即是把衛(wèi)星用螺釘連接在支架車上,也叫支架車狀態(tài)。支架車由絲杠旋緊,支撐于地面上。嚴(yán)格來說,這種固定形式使衛(wèi)星處于非完全固定邊界,其基本頻率低于衛(wèi)星完全固定的頻率。懸吊狀態(tài)則是用吊具吊起衛(wèi)星,吊具上端掛在實(shí)驗(yàn)室內(nèi)的吊車上。
1.2 試驗(yàn)測試工況
衛(wèi)星固支和懸吊兩種狀態(tài)下,按表1所示的動量輪運(yùn)轉(zhuǎn)工況進(jìn)行微振動環(huán)境測試。在微振動環(huán)境測試之前,應(yīng)進(jìn)行背景噪聲和衛(wèi)星結(jié)構(gòu)頻率特性的測試。試驗(yàn)期間需關(guān)閉實(shí)驗(yàn)室內(nèi)空調(diào)、照明等設(shè)備,以免引起未知微振動噪聲,同時(shí)衛(wèi)星附近避免人員走動,以減少噪聲及微幅振動等擾動環(huán)境。
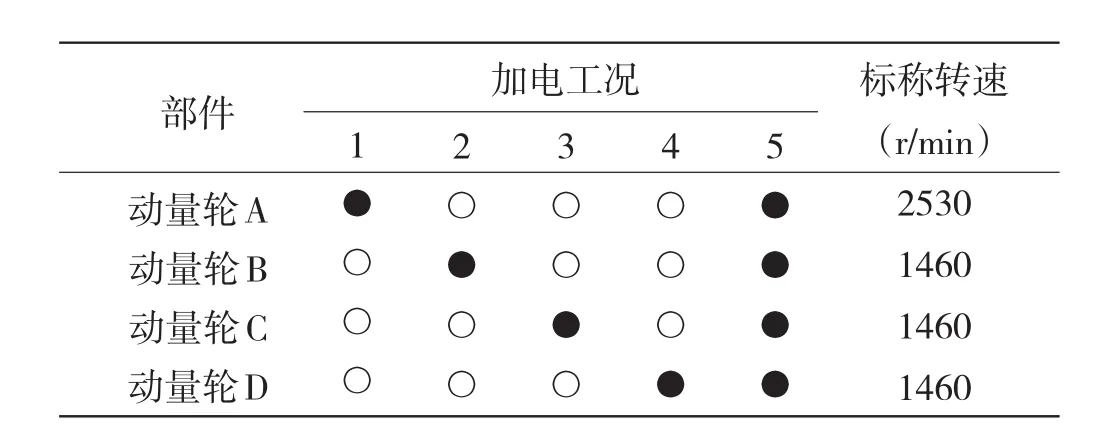
表1 動量輪加電運(yùn)轉(zhuǎn)工況Table 1 Operation condition for momentum wheels
1.3 試驗(yàn)數(shù)據(jù)
衛(wèi)星固支狀態(tài)下,不同動量輪在其標(biāo)稱轉(zhuǎn)速下的微振動量級見表2。可以看出,動量輪C轉(zhuǎn)動產(chǎn)生的微振動最大,其本身最大值約為103×10-2g(時(shí)域),標(biāo)準(zhǔn)差約為29.8×10-2g。輪D轉(zhuǎn)動產(chǎn)生的微振動最小,其本身最大值約為15.5×10-2g(時(shí)域),標(biāo)準(zhǔn)差約為4×10-2g。
輪C轉(zhuǎn)動激起相機(jī)處的微振動最大,相機(jī)次鏡處微振動時(shí)域最大值為13.9×10-2g,標(biāo)準(zhǔn)差約為4.9×10-2g。激起相機(jī)處的微振動量級最小的不是本身微振動擾動最小的動量輪D,而是動量輪B。動量輪B激起的相機(jī)次鏡處微振動時(shí)域最大值為2.6×10-2g,標(biāo)準(zhǔn)差約為0.67×10-2g。這是由微振動傳遞特性的差異引起的。
衛(wèi)星懸吊狀態(tài)下,不同動量輪在其標(biāo)稱轉(zhuǎn)速下的微振動量級見表3。可以看到,衛(wèi)星在懸吊狀態(tài)與固支狀態(tài)具有基本相同的特性。
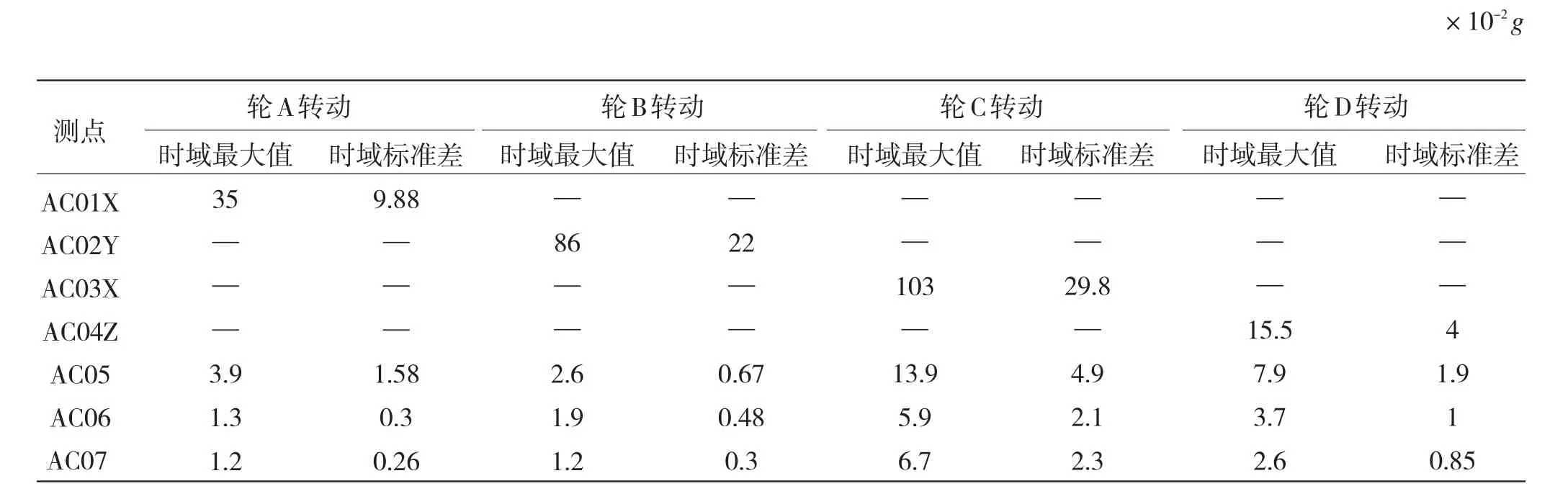
表2 固支狀態(tài)下不同動量輪轉(zhuǎn)動產(chǎn)生的微振動環(huán)境Table 2 Micro-vibration data induced by rotating momentum wheels under fixed boundary condition
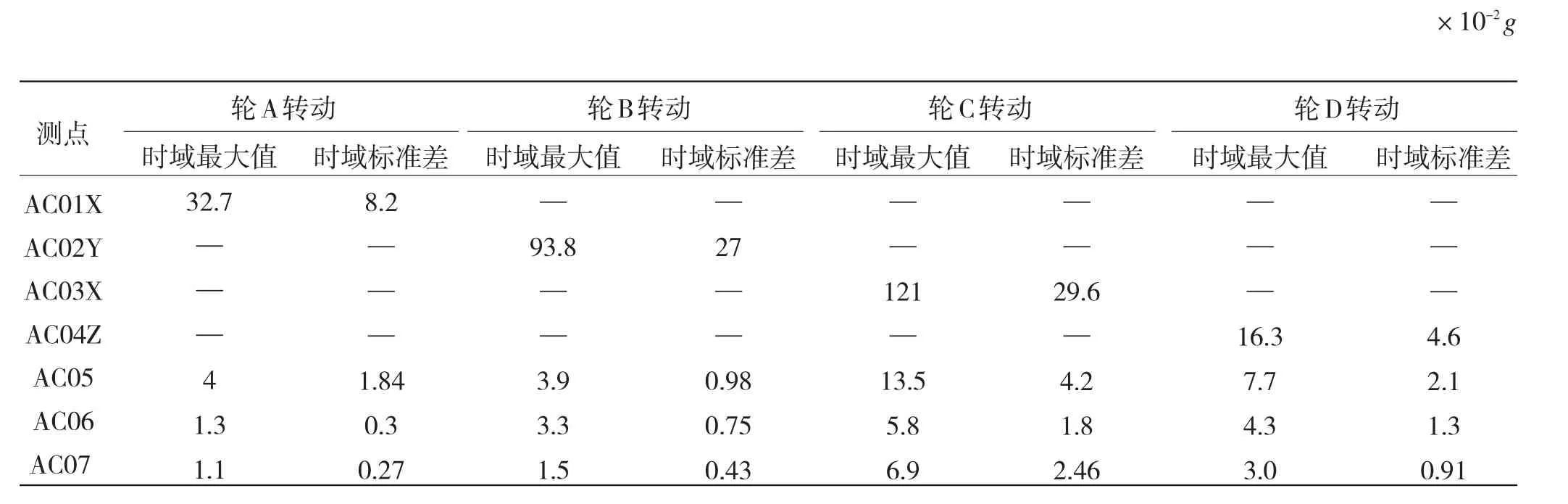
表3 懸吊狀態(tài)不同動量輪轉(zhuǎn)動狀態(tài)產(chǎn)生微振動環(huán)境Table 3 Micro-vibration data induced by rotating momentum wheels under suspended boundary condition
2 微振動特性分析
2.1 輪子與衛(wèi)星結(jié)構(gòu)的耦合
動量輪A以轉(zhuǎn)速2530 r/min轉(zhuǎn)動,對應(yīng)的轉(zhuǎn)動頻率為42.2 Hz,由于輪子的不平衡,其會在42.2 Hz處產(chǎn)生干擾力。此外,動量輪本身存在的徑向平移模態(tài)、軸向平移模態(tài)以及搖擺模態(tài)[14—15],還會激起其他的振動頻率。
單獨(dú)動量輪A固定于地面以轉(zhuǎn)速2530 r/min轉(zhuǎn)動時(shí),實(shí)測得到的產(chǎn)生較大干擾力和力矩的頻率為42.2,245,225,303 Hz等。其中最大的干擾力為303 Hz,量級約為:Fx=469 mN,F(xiàn)y=84 mN,F(xiàn)z=3 N,Tx=0.000 083Nm,Ty=0.023 Nm,Tz=0.000 45 Nm。由此可見,42.2 Hz只是動量輪的轉(zhuǎn)速頻率,此頻率處因輪子的動不平衡產(chǎn)生干擾力,而其他干擾響應(yīng)頻率可以歸為動量輪的本身模態(tài)頻率。
從整星上動量輪處的響應(yīng)曲線(如圖2所示)來看,響應(yīng)的頻率包含42.2 Hz,此頻率對應(yīng)于輪子轉(zhuǎn)動頻率,是由輪子的動不平衡引起。星上其他的微振動響應(yīng)頻率有22,77,84 Hz,在100 Hz之上響應(yīng)頻率更多,其中最大的為205 Hz。由此可見,除了42 Hz,動量單獨(dú)測試與動量輪安裝星上的響應(yīng)頻率有較大變化。由于衛(wèi)星結(jié)構(gòu)與動量輪的耦合影響,星上動量輪處不僅響應(yīng)頻率點(diǎn)增加了,而且響應(yīng)頻率前移了。
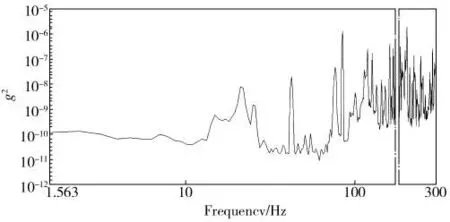
圖2 動量輪A的微振動頻域曲線Fig.2 Micro-vibration curve of frequency domain for the wheel A
2.2 衛(wèi)星安裝邊界的影響
在衛(wèi)星固支(支架車上)和懸吊狀態(tài)下分別進(jìn)行了背景噪聲的測試,固支狀態(tài)下的時(shí)域最大值、標(biāo)差最大值、總均方根最大值分別為0.9×10-2g,0.4×10-2g,3.5×10-2g;懸吊狀態(tài)下分別為0.7×10-2g,0.176×10-2g,0.1×10-2g。可以看出,懸吊狀態(tài)背景噪聲較小,固支狀態(tài)的背景噪聲稍大。這主要是由于地面一些干擾通過固支邊界傳遞至星上,而懸吊系統(tǒng)距離地面較遠(yuǎn),中間經(jīng)過吊車和衛(wèi)星吊具的傳遞,對地面微振干擾有一定衰減作用。可以認(rèn)為,固支狀態(tài)由地面直接傳遞至星上的背景干擾大于懸吊狀態(tài),因此懸吊狀態(tài)有利于微振動環(huán)境測量。
動量輪A轉(zhuǎn)動時(shí),固支和懸吊狀態(tài)下動量輪處微振動譜曲線對比如圖3所示,可以看出,二者的主要區(qū)別在低頻區(qū)域。4.7,8.6 Hz是懸吊狀態(tài)系統(tǒng)所具有的共振頻率,14.8,21 Hz為固支狀態(tài)系統(tǒng)所具有的共振頻率,這兩者的不同是由衛(wèi)星邊界狀態(tài)不同造成的。在42 Hz及其以后曲線比較一致。

圖3 固支與懸吊動量輪A的擾振曲線Fig.3 Micro-vibration curve for the wheel A under the fixed and suspended conditions
衛(wèi)星固支(支架車上)和懸吊狀態(tài)下,其微振動測量數(shù)據(jù)見表4。可以看出,量級差別不大,從總量級來看,兩種邊界狀態(tài)對星上微振動時(shí)域上的量級影響不大。差異主要為兩種邊界在低頻的響應(yīng)。
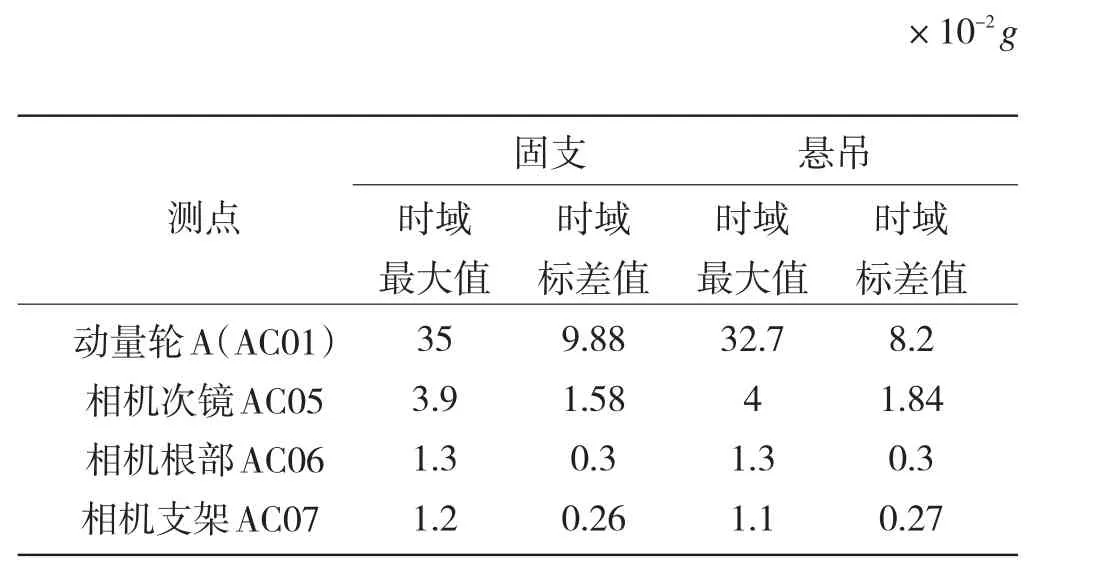
表4 固支和懸吊狀態(tài)下動量輪A轉(zhuǎn)動時(shí)微振動加速度Table 4 Micro-vibration acceleration data for the wheel A under the fixed and suspended conditions
2.3 微振傳遞特性
根據(jù)表2數(shù)據(jù),衛(wèi)星固支狀態(tài)下,動量輪單獨(dú)轉(zhuǎn)動時(shí),動量輪C本身微振動干擾最大,動量輪D最小,兩個動量輪的微振動量級相差大約7倍。從每個動量輪到相機(jī)次鏡(AC05)的傳遞來看(按標(biāo)差值計(jì)算),都具有衰減特性,動量輪D的傳遞比較大,約為0.475,動量輪B的傳遞比較小,約為0.03。因此,應(yīng)把具有較大干擾的動量輪放置在傳遞比較小的路徑上,即把具有較大干擾的動量輪放置在動量輪B安裝處,把干擾較小的動量輪放置在動量輪D安裝處。動量輪D位于載荷艙隔板上,與安裝相機(jī)的艙板只隔一個界面,與相機(jī)距離也較短,因此,其微振傳遞比較大。從傳遞距離分析,動量輪A距離相機(jī)安裝面最遠(yuǎn),但它的微振傳遞比不是最小的,說明距離和界面相比,傳遞界面的阻尼對微振傳遞比影響較大,其次為距離的影響。
衛(wèi)星懸吊狀態(tài)下,動量輪單獨(dú)轉(zhuǎn)動時(shí),動量輪本身的微振動干擾與固支狀態(tài)下的特性基本一致。從每個動量輪到相機(jī)次鏡(AC05)的傳遞來看(按標(biāo)差值計(jì)算),動量輪D的傳遞比較大,動量輪B的傳遞比較小,這也與固支狀態(tài)下的特性基本一致。
2.4 分別轉(zhuǎn)動與同時(shí)轉(zhuǎn)動的差異
4個動量輪同時(shí)轉(zhuǎn)動與動量輪單獨(dú)轉(zhuǎn)動的微振動對比見表5。可以看到,4個動量輪同時(shí)轉(zhuǎn)動產(chǎn)生的微振動干擾相比單個動量輪轉(zhuǎn)動要大,對相機(jī)處的微振動量級主要由最大擾動的動量輪C貢獻(xiàn)。四輪同時(shí)轉(zhuǎn)動時(shí),相機(jī)次鏡微振動與單獨(dú)動量輪C轉(zhuǎn)動引起的相機(jī)上微振動基本相當(dāng)。從表5幾個關(guān)鍵測點(diǎn)的標(biāo)差值比較,4輪同時(shí)轉(zhuǎn)動相當(dāng)于單個動量輪C的1~1.3倍,單個動量輪D的2.5~3.7倍。
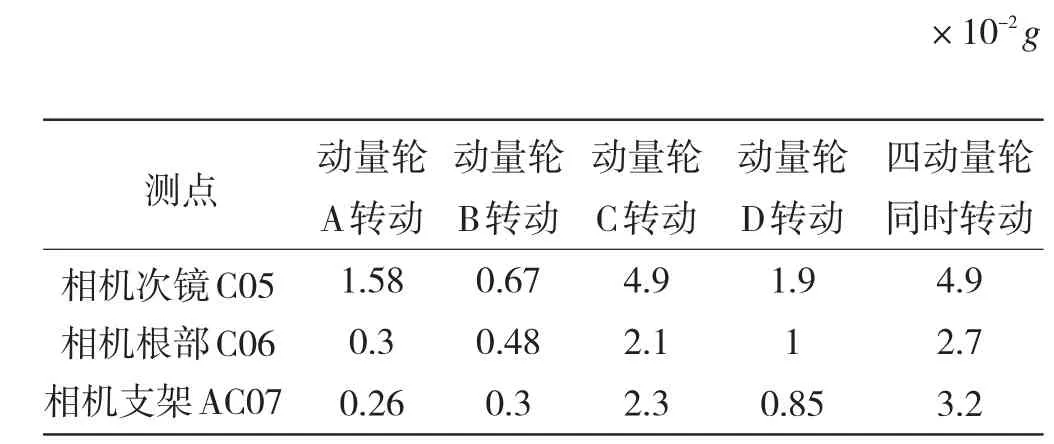
表5 衛(wèi)星固支狀態(tài)不同動量輪轉(zhuǎn)動狀態(tài)產(chǎn)生微振動環(huán)境Table 5 Micro-vibration data for momentum wheels with different work status under the fixed condition
2.5 微振動抑制策略
根據(jù)上述初樣衛(wèi)星微振動試驗(yàn)分析得到的星上微振動傳遞特性,對正樣衛(wèi)星4個動量輪的安裝位置進(jìn)行了調(diào)換,把具有較大干擾的正樣動量輪放置在傳遞較小的路徑上。對4個正樣動量輪分別進(jìn)行干擾力測試,得到其干擾力大小,見表6。
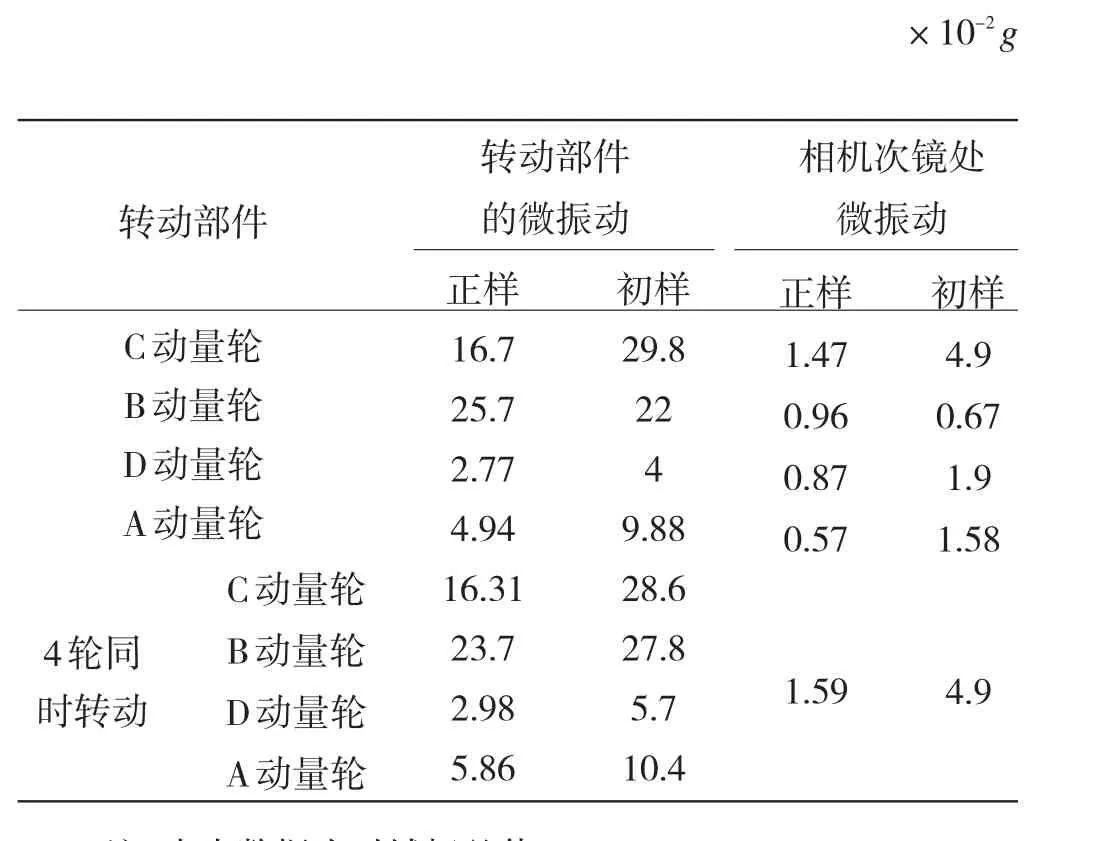
表6 正樣衛(wèi)星與初樣衛(wèi)星微振動環(huán)境測試結(jié)果對比Table 6 Comparison of micro-vibration test results between prototype satellite and flight satellite
從表6可以看到,初樣時(shí)四輪同時(shí)轉(zhuǎn)動導(dǎo)致相機(jī)次鏡處的微振動量級為4.9×10-2g,正樣時(shí)為1.59×10-2g,微振動量級下降67.6%。初樣與正樣動量輪的本身微振動最大擾振相差不大,但相機(jī)次鏡的微振動有較大下降。
3 微振動在軌狀態(tài)仿真分析
3.1 微振動仿真分析思路
進(jìn)行成像質(zhì)量影響分析所需要的直接參數(shù)是微振動的角位移/角速度,測量得到的微振加速度還不易于分析對相機(jī)成像質(zhì)量的影響,因此,需要利用有限元模型從測量的微振動加速度數(shù)據(jù)分析計(jì)算對相機(jī)成像有直接影響的微振角位移/角速度大小。仿真分析需要試驗(yàn)數(shù)據(jù)的修正支持,由于地面微振動試驗(yàn)狀態(tài)一般與在軌狀態(tài)有較大差異,因此,地面微振動試驗(yàn)數(shù)據(jù)還很難直接用于在軌狀態(tài)微振動仿真分析的驗(yàn)證。為此,提出一種基于地面試驗(yàn)數(shù)據(jù)(支架車狀態(tài))的衛(wèi)星微振動仿真分析思路,具體步驟為:建立衛(wèi)星結(jié)構(gòu)動力學(xué)模型,此模型由衛(wèi)星常規(guī)振動試驗(yàn)數(shù)據(jù)修正;修改衛(wèi)星模型為支架車狀態(tài),以便利用地面支架車微振動測試數(shù)據(jù)進(jìn)行驗(yàn)證,主要驗(yàn)證從干擾源到相機(jī)微振動傳遞特性的正確性;修改支架車狀態(tài)衛(wèi)星模型為自由狀態(tài);添加太陽翼狀態(tài)模型,開展在軌狀態(tài)微振動仿真分析。
3.2 衛(wèi)星微振動建模分析
初始衛(wèi)星結(jié)構(gòu)動力學(xué)模型已建立,并由衛(wèi)星振動試驗(yàn)數(shù)據(jù)修正驗(yàn)證。根據(jù)此次微振動試驗(yàn)中的傳遞特性,衛(wèi)星在支架車上的主要頻率為14.91,21.59 Hz。據(jù)此,修正衛(wèi)星模型為支架車狀態(tài),利用bush單元進(jìn)行修改,修正后衛(wèi)星最低頻率與支架車上的衛(wèi)星頻率相匹配。根據(jù)支架車上的模型計(jì)算后得到初樣衛(wèi)星C動量輪激勵下的微振動響應(yīng),衛(wèi)星上主要關(guān)心點(diǎn)的響應(yīng)與試驗(yàn)測點(diǎn)的對比見表7。
從表7可以看出,在相機(jī)安裝處以及其他衛(wèi)星結(jié)構(gòu)上的計(jì)算結(jié)果和試驗(yàn)結(jié)果比較接近,在相機(jī)次鏡組件三桿前端計(jì)算結(jié)果和試驗(yàn)測試結(jié)果有較大差異。這主要由于微振動試驗(yàn)所用相機(jī)為模擬件,三桿材料為鋁合金材料,而實(shí)際產(chǎn)品的材料為殷鋼材料,剛度不一致。因此,在計(jì)算中相機(jī)模型采用真實(shí)材料的模型。
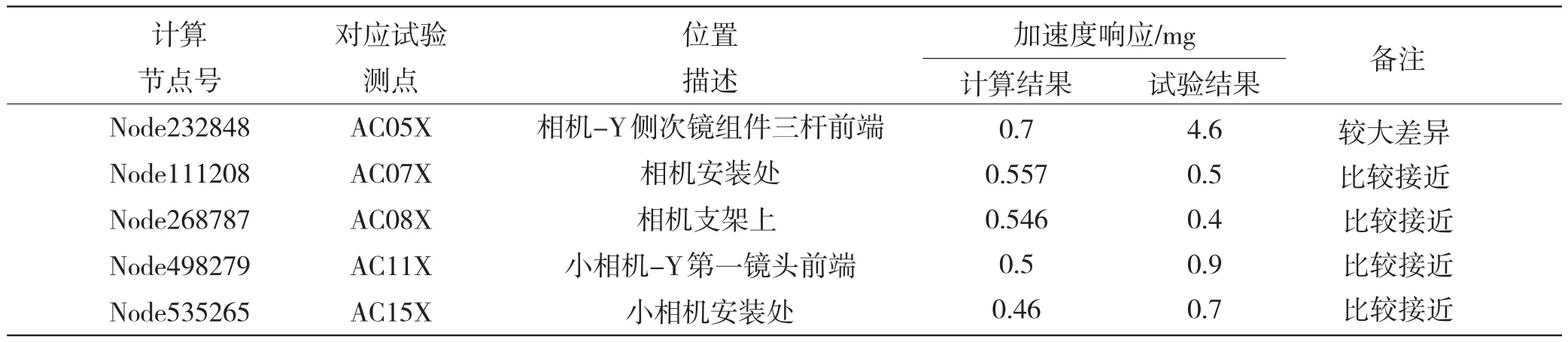
表7 固支衛(wèi)星微振動計(jì)算結(jié)果與試驗(yàn)結(jié)果對比Table 7 Comparison between micro-vibration simulation results and test results
支架車狀態(tài)的衛(wèi)星模型經(jīng)過試驗(yàn)數(shù)據(jù)修正驗(yàn)證后,衛(wèi)星邊界再修改為在軌自由邊界狀態(tài),并驗(yàn)證了前6階模態(tài)接近于0,為自由無約束狀態(tài)。然后衛(wèi)星添加展開狀態(tài)的太陽翼模型,根據(jù)前期初步分析,太陽翼轉(zhuǎn)動對本星微振動影響不大,因此,模型中太陽翼根部與星體固體連接。太陽翼展開狀態(tài)下整星在軌微振動響應(yīng)計(jì)算結(jié)果見表8。
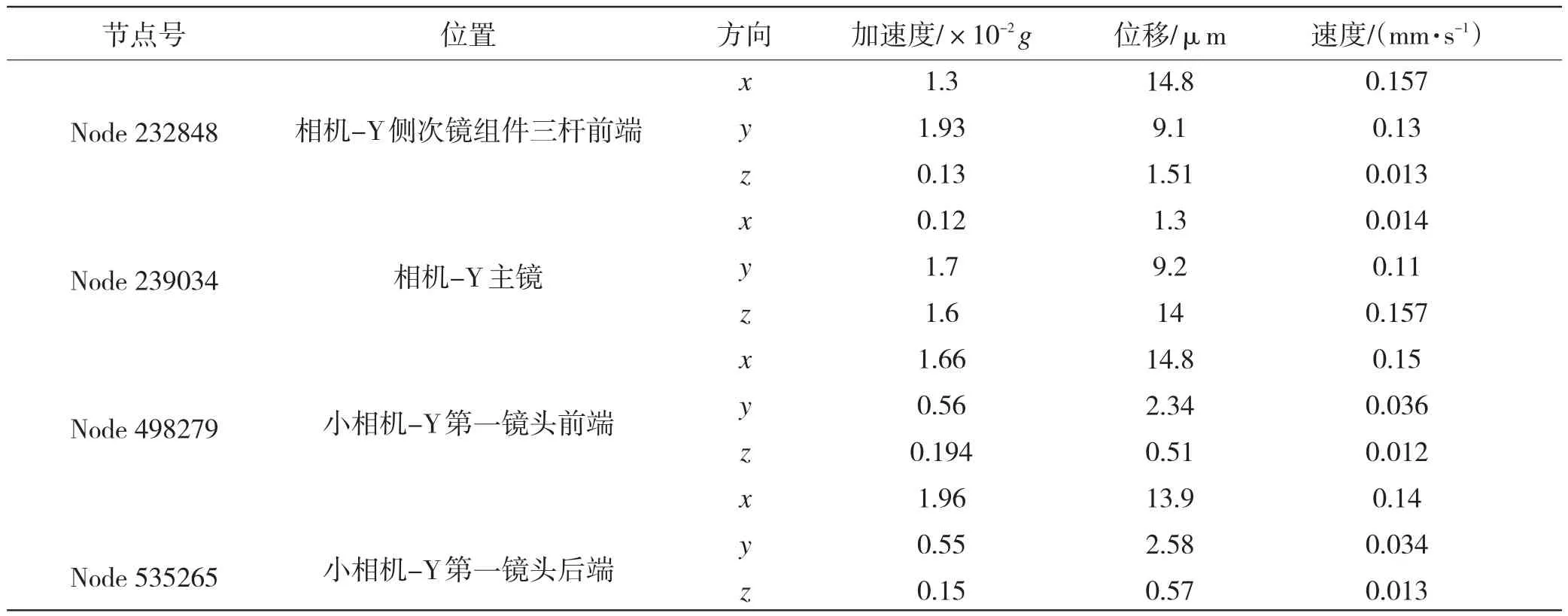
表8 太陽翼展開狀態(tài)下整星在軌微振動響應(yīng)Table 8 Micro-vibration of satellite with deployed solar
3.3 相機(jī)轉(zhuǎn)角分析
根據(jù)相機(jī)次鏡到主鏡的距離和計(jì)算得到的次鏡與主鏡的位移,利用表8中有限元模型計(jì)算數(shù)據(jù)可以計(jì)算得到初樣衛(wèi)星相機(jī)從次鏡到主鏡的轉(zhuǎn)角(總均方根值)。同樣可以計(jì)算星上另一個小相機(jī)的轉(zhuǎn)角。從位移數(shù)據(jù)看,相機(jī)內(nèi)部的相對位移主要發(fā)生在x方向,因此,轉(zhuǎn)角為在xoz平面內(nèi)繞y軸的轉(zhuǎn)角。
1)相機(jī)的轉(zhuǎn)角:相機(jī)次鏡到主鏡的距離約L1為416 000 μm,計(jì)算得從次鏡到主鏡的轉(zhuǎn)角為6.7″。
2)小相機(jī)的轉(zhuǎn)角:小相機(jī)從第一鏡頭頭部到相機(jī)后端的距離約L2為514 000 μm,計(jì)算得第一鏡頭頭部到相機(jī)后端的轉(zhuǎn)角為0.36″。
可以看出,在太陽翼展開狀態(tài)下,相機(jī)在軌x動量輪微振動引起的轉(zhuǎn)角較大,而小相機(jī)在幾種狀態(tài)下的微振動轉(zhuǎn)角都較小。
3.4 對成像的影響分析
3.3 節(jié)得到了相機(jī)的總均方根值轉(zhuǎn)角,此總均方根值轉(zhuǎn)角按分段頻率計(jì)算可得到相機(jī)不同頻段的角振動數(shù)據(jù),見表9。可以看出,支架車上和自由狀態(tài)的較大轉(zhuǎn)角振幅發(fā)生在2~10 Hz頻段,其次為10~50 Hz,而在50 Hz以上相機(jī)的微振動轉(zhuǎn)角較小。對于在軌太陽翼展開狀態(tài),最大的轉(zhuǎn)角為6.5″,發(fā)生在1~2 Hz之間,峰值為1.7 Hz。
在軌太陽翼展開狀態(tài),相機(jī)較大的角位移是由太陽翼耦合引起的。對于文中分析的工況,太陽翼耦合振動1.7 Hz是主要貢獻(xiàn)因素,初樣狀態(tài)的微振動激勵在低頻大約有0.1個像素的振動影響。

表9 相機(jī)分頻段角振動分析結(jié)果Table 9 Computation angular results with different frequency bands for camera
4 結(jié)論
開展了不同衛(wèi)星邊界的星上動量輪轉(zhuǎn)動的微振動試驗(yàn)研究和仿真分析,通過對試驗(yàn)數(shù)據(jù)和計(jì)算結(jié)果的分析,得出以下結(jié)論。
1)輪子單獨(dú)測試與星上測試得到的微振動譜有較大差異,而相同的頻譜段僅為轉(zhuǎn)動頻率,這是由于輪子與衛(wèi)星結(jié)構(gòu)的耦合造成的。
2)衛(wèi)星不同邊界的試驗(yàn)數(shù)據(jù)表明,衛(wèi)星懸吊狀態(tài)的背景噪聲小于固支狀態(tài)。動量輪轉(zhuǎn)動時(shí),固支和懸吊狀態(tài)下星上微振動環(huán)境譜在轉(zhuǎn)動頻率以上部分差別不大,在轉(zhuǎn)動頻率以下的差別主要是由于固支與懸吊的基本頻率不同。
3)每個動量輪本身的擾動大小不同,其激起的相機(jī)微振動環(huán)境由傳遞特性決定,應(yīng)把具有較大擾動的動量輪放置在傳遞較小的路徑上。傳遞界面對微振傳遞比影響較大,其次為距離的影響。
4)對相機(jī)處的微振動量級主要由最大擾動的動量輪貢獻(xiàn)。4個輪同時(shí)轉(zhuǎn)動時(shí)的相機(jī)次鏡微振動與最大擾動動量輪單獨(dú)轉(zhuǎn)動時(shí)基本相當(dāng)。
5)文中的微振動仿真分析方法可以由地面試驗(yàn)數(shù)據(jù)修正和驗(yàn)證,保證了仿真分析結(jié)果的可信性。分析結(jié)果表明,太陽翼會帶來一低頻的干擾影響。
[1] 張振華,楊雷,龐世偉.高精度航天器微振動力學(xué)環(huán)境分析[J].航天器環(huán)境工程,2009,26(6):528—534.ZHANG Zhen-hua,YANG Lei,PANG Shi-wei.Jitter Environment Analysis for Micro-precision Spacecraft[J].Spacecraft Environment Engineering,2009,26(6):528—534.
[2] 譚天樂,朱春艷,朱東方,等.航天器微振動測試、隔離、抑制技術(shù)綜述[J].上海航天,2014,31(6):31—45.TAN Tian-le,ZHU Chun-yan,ZHU Dong-fang,et al.Overview of Micro-vibration Testing,Isolation and Suppression Tchnology for Spacecraft[J].Aerospace Shanghai,2014,31(6):31—45.
[3] 龐世偉,楊雷,曲廣吉.高精度航天器微振動建模與評估技術(shù)最近進(jìn)展[J].強(qiáng)度與環(huán)境,2007,34(6):1—9.PANG Shi-wei,YANG Lei,QU Guang-ji.New Development of Micro-vibration Integrated Modeling and Assessment Technology for High Performance Spacecraft[J].Structure and Environment Engineering,2007,34(6):1—9.
[4] 蔣國偉,周徐斌,沈軍烽,等.某衛(wèi)星微振動建模與仿真[J].航天器環(huán)境工程,2011,28(1):40—44.JIANG Guo-wei,ZHOU Xu-bin,SHEN Jun-feng,et al.Mod-eling and Simulation of Micro-vibration for a Satellite[J].Spacecraft Environment Engineering,2011,28(1):40—44.
[5] KIM Y.Thermal Creak Induced Dynamics of Space Structures[D].Boston:MIT,1999.
[6] COLLINS Simon A.Multi-axis Analog Adaptive Feed-forward Cancellation of Cryocooler Vibration[D].Boston:MIT,1994.
[7]BELY P Y,LUPIE O L,HERSHEY J L.The Line of Sight Jitter of the Hubble Space Telescope[C]//Proceedings of SPIE,1993.
[8]趙偉.航天器微振動環(huán)境分析與測量技術(shù)發(fā)展[J].航天器環(huán)境工程,2006,23(4):210—214.ZHAO Wei,Analysis on Micro-vibration Environment of Spacecraft and Measurement Technology[J].Spacecraft Environment Engineering,2006,23(4):210—214.
[9] 周東強(qiáng),曹瑞,趙煜.遙感系列衛(wèi)星在軌微振動測量與分析[J].航天器環(huán)境工程,2013,30(6):627—630.ZHOU Dong-qiang,CAO Rui,ZHAO Yu.Micro-vibration Measurement and Analysis of a Series of Remote Sensing Satellites In-orbit[J].Spacecraft Environment Engineering,2013,30(6):627—630.
[10]鄒元杰,王澤宇,張志娟,等.航天器微振動穩(wěn)態(tài)時(shí)域響應(yīng)分析方法[J].航天器工程,2012,21(6):37—42.ZOU Yuan-jie,WANG Ze-yu,ZHANGH Zhi-juan,et al.Analysis Method of Steady Time-domain Response for Spacecraft Micro-vibration[J].Spacecraft Engineering,2012,21(6):37—42.
[11]葛東明,鄒元杰,張志娟,等.基于全柔性衛(wèi)星模型的控制閉環(huán)微振動建模與仿真[J].航天器工程,2012,21(5):36—41.GE Dong-ming,ZOU Yuan-jie,ZHANGH Zhi-juan,et al.Control Closed-loop Micro-vibration Modeling and Simulation Based on Flexible Satellite Model[J].Spacecraft Engineering,2012,21(5)36—41.
[12]葛東明,鄒元杰.高分辨率衛(wèi)星結(jié)構(gòu)-控制-光學(xué)一體化建模與微振動響應(yīng)分析[J].航天器環(huán)境工程,2013,30(6):586—590.GE Dong-ming,ZOU Yuan-jie.Structure-Control-Optics Integrated Modeling and Micro-vibration Analysis for High Resolution Satellite[J].SpacecraftEnvironmentEngineering,2013,30(6):586—590.
[13]劉涌,胡永力,王偉之,等.動量輪擾振對成像質(zhì)量影響的全路徑分析[J].航天器工程,2013,22(1):44—48.LIU Yong,HU Yong-li,WANG Wei-zhi,et al.Full Path Analysis of Momentum Wheel Jitter Effect on Imaging Quality[J].Spacecraft Engineering,2013,22(1):44—48.
[14]李連軍,戴金海.反作用輪系統(tǒng)內(nèi)干擾建模與仿真分析[J].系統(tǒng)仿真學(xué)報(bào),2005,17(8):1855—1863.LI Lian-jun,DAI Jin-hai.Inner Disturbance Modeling and Simulation Analysis of Reaction Wheel System[J].Journal of System Simulation,2005,17(8):1855—1863.
[15]趙煜,張鵬飛,程偉.反作用輪擾動特性測量及研究[J].實(shí)驗(yàn)力學(xué),2009,24(6):532—538.ZHAO Yu,ZHANG Peng-fei,CHEN Wei.Measurement and Study of Disturbance Characteristics of Reaction Wheel Assembly[J].Experimental Mechanics,2009,24(6):532—538.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
