一種非理想全向性覆蓋無線網絡室內定位算法研究
2015-05-30 10:48:04寧林
科技資訊 2015年9期
寧林
摘 要:隨著無線定位技術的快速發展,室內定位技術成為人們關注的焦點。然而,大部分基于無線的室內定位解決方案需要花費大量的人力和時間進行位置勘測,而且在實際測量中,天線的非理想全向性覆蓋對測量數據的真實性有很大影響。因此,該文提出一種區域定位算法,不需要進行位置勘測,并考慮天線全向性的不足,將測量角度分區間進行討論,并將收集到的數據運用智能算法找出區域內的特征點,計算待定位點與特征點和AP之間的歐幾里德距離,從而確定待定位點的區域。
關鍵詞:定位 非全向覆蓋 天線全向性 測量角度
中圖分類號:TP393 文獻標識碼:A 文章編號:1672-3791(2015)03(c)-0009-02
近年來,在無線通信技術的迅速發展下,人們對無線定位業務的需求也越來越迫切。目前,全球定位系統GPS在室外的實際應用中發揮著精度高的作用,但是在室內,由于室內環境有很大程度的室內遮蔽和非視距噪聲的干擾,GPS等衛星定位系統的定位精度明顯下降。然而,在國內外專家的努力研究下,室內定位技術有著卓越的發展。
目前,定位算法主要由基于距離算法和無需測距算法兩部分組成[1-2]。其中,基于距離算法是通過測量節點間的距離或者角度,使用三邊測量、三角測量或者最大似然估計法來估計節點位置;而無需測距算法是根據網絡連通性等信息實現節點定位。在基于距離的定位中,使用無線信號傳播模型,但是信號傳播模型的參數與環境有關,要確定一個環境的參數,必須進行大量的位置勘測,并且參數隨環境的變化而變化,這一類定位算法同樣耗時耗力,不具有普適性。同時,在實際測量中,由于天線的全向性不足,導致測量的數據誤差大,單純地使用傳播模型,會導致距離嚴重偏離真實值。
1 算法基本思想
由于Wi-Fi技術的發展,使得通過個人電子設備進行室內定位技術變為可能。但是由于Wi-Fi射頻信號在室內傳播容易受到環境的影響,比如人員走動,室內物體等。如果根據RSSI值[3]使用定位模型計算距離,然后使用多邊定位算法來進行定位,會產生很大的誤差,而且這種誤差可能會疊加,這樣會嚴重影響定位精度。另外,隨著Wi-Fi技術的迅速發展,室內AP數量越來越多,而智能手機的普及,使得獲取AP的RSSI值變得更加容易。
但是,由于RSSI值的獲取跟天線方向有很大的關系[4],同一地點不同角度獲得的RSSI值有很大的區別,相差大約10dB左右,如果使用定位模型進行定位在計算上會出現很大的誤差,并且誤差的疊加會使誤差更大。而現有的智能手機集成了很多傳感器,其中陀螺儀能用于測量手機方向,可以使用陀螺儀測量方向的功能獲得手機在測量數據時的方向。
針對以上兩個問題,該文提出一種區域定位思想,室內AP一般是規則分布,已知室內AP坐標,通過攜帶有智能手機的用戶按照工作需求在室內行走,周期性地記錄測得的每一個AP的RSSI值并通過陀螺儀測量角度并記錄,用向量表示。
相關術語與定義如下。
假設在一個較大的場景中,AP節點呈網格狀分布,當人員進入該區域,通過測量RSSI值可以確定接收信號強度最強的四個AP節點。
定義:對于n個訓練數據,設每個數據記錄格式為:
,(1)。
對于其中任意一個數據,如果滿足條件:
,
且(2)
說明該數據是在方向1上面的點在方向1上的數據。
如果滿足條件:
,
且(3)
說明該數據是在方向2上面的點在方向2上的數據。
如果滿足條件:
,
且(4)
說明該數據是在方向3上面的點在方向3上的數據。
如果滿足條件:
,
且(5)
說明該數據是在方向4上面的點在方向4上的數據。
2 算法處理步驟
2.1 確定特征點
假設滿足公式(2),(3),(4),(5)的數據分別用集合表示,在集合中分別任意取1個數據,設為,則有:
;
;
;
;
使用貪心算法以以下公式作為目標函數進行求解:
解出的向量代表中心特征點的4個方向的數據。分別代表方向1到方向4的角度。
2.2 中心點數據校正
通過2.1節確定的中心特征點四個方向的向量數據,由于測量中存在誤差,會引起結果不惟一,在每個方向上各選擇一個向量,當向量中的角度滿足公式(6)時,該四個向量就是中心特征點的數據。
,,
(6)
如果滿足公式(6)的向量還是不惟一,則在定位中隨機抽取一組作為中心特征點的數據。
2.3 角度區間劃分
該算法在四個方向上進行討論,但是在實際測量時,角度從0到360。都可能,所以需要對區間進行劃分,確定測量的角度處于哪個區間,從而使用該區間代表數據進行定位服務。在定位階段,如果測量的角度,則使用方向上的數據作為該區間的代表數據。其中表示方向上的角度值。
2.4 定位服務
通過上面的方法找到由4個AP形成的規則四邊形的中點,該中點的特征由四個方向測量的4個AP的RSSI值來表征。在定位服務階段,定位步驟如下
(1)攜帶有智能手機終端的用戶進入布滿AP的區域,通過測量RSSI值,確定該用戶位于由哪四個AP所形成的四邊形里。
(2)確定AP后,通過智能手機測量四個AP的RSSI值,并確定測量的角度,記為:。
(3)通過對角度進行劃分,確定該測量的角度屬于哪一個角度區間。
(4)確定角度區間之后,假設四個AP在該區間上的數據為:,中點在該區間的數據為:,計算與的歐幾里德距離:,表示待定位點到AP和中點的歐幾里德距離,其中。
(5)比較計算得到的5個歐幾里德距離,如果,則待定位點位于以點為中心的圓形區域中。
3 性能分析
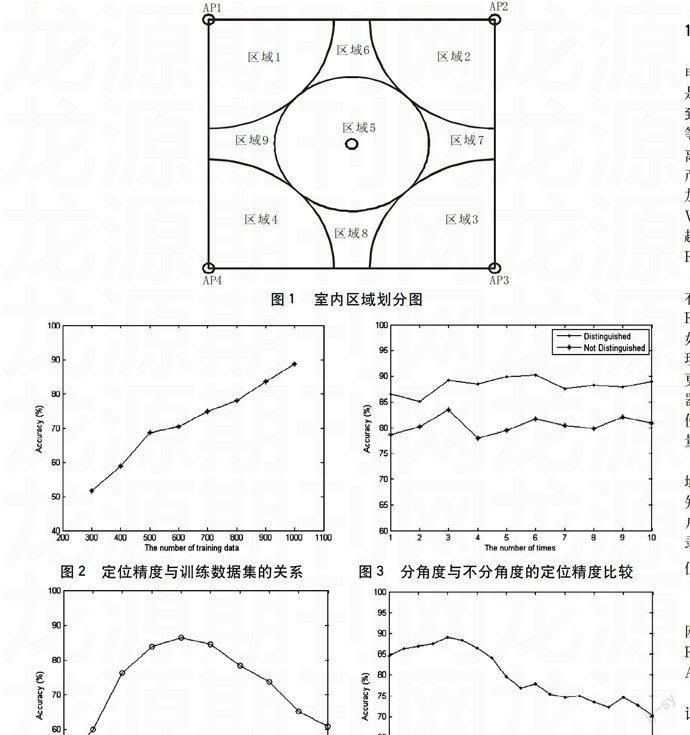
實驗在一個8m×8m的室內進行,四個AP布置在四個角上,如圖1所示,將室內環境劃分為9個區域,其中區域1、2、3、4、5為定位區域,區域6、7、8、9為定位盲區。
該定位算法是定位人員處于哪個區域,在精度上與訓練數據集的個數有很大關系。如圖2所示,每個數據都是通過100次的數據統計得出的。由圖可知,當訓練數據太少時,定位精度很低,當訓練數據達到1 000個左右時,定位精度能達到將近90%。這是由于訓練數據越多獲得的場景信息就越多,定位精度越高。
在實驗中,我們比較了分角度定位和不分角度定位的定位精度。都進行了10組實驗,使用的是1 000個訓練數據的數據集,每一組都是通過100次的統計得出的。定位的正確率如圖3所示,分角度的定位明顯比不分角度的定位的精度要高,這是由于天線全向性不足的原因引起的。
如圖4所示,測量誤差門限值ξ大約在2.5dB左右性能最好,這是由于如果該值太小,在確定中心特征點時,區分度不夠,導致找到的中心特征點4個方向上的數據不準確,從而降低了精度。如果該值太大,導致中心特征點4個方向上的數據太多,不易區分,在隨機選擇數據時,可能會導致選到的數據不夠準確。
如圖5所示,測量角度誤差門限值σ在1°~4°之間性能相當,在3°左右性能最佳。這是因為當該值太小時,通過校正,可能會淘汰一部分準確的數據,但整體來說性能還是比較好。當σ>4°之后,準確率下降很快,這是由于該值太大,在校正時一些錯誤數據也被選中,在定位過程中,隨機選取的數據可能會選中這些錯誤的數據,從而導致了精度的快速下降。
4 結語
該文主要針對天線全向性不足的問題進行分析研究,該算法減小了位置勘測所耗費的人力和時間,并將角度作為主要因素進行分析討論。通過隨機測量的數據找到特征點不同方向上的數據,并分角度進行討論,并利用角度的關系對數據進行校正。由于測量的角度變化范圍在0°~360°之間,該文對角度進行了區間劃分。通過實驗,得出了測量誤差門限值ξ與測量角度誤差門限值σ的最佳值,并得出了定位精度與訓練數據集的關系。
參考文獻
[1] 彭宇,王丹.無線傳感器網絡定位技術綜述[J].電子測量與儀器學報,2011.
[2] 王中生,曹琦.基于ZigBee技術的無線定位研究與實現[J].計算機技術與發展,2010(12).
[3] 阮衛華.常見的室內無線定位技術簡介[J].科技信息,2009(33).