改進遺傳算法PID在雙閉環(huán)BLDCM控制系統(tǒng)中的應用研究
2015-05-30 10:48:04朱雪璇
科技創(chuàng)新與應用 2015年36期
朱雪璇
摘 要:無刷自流電機(BLDCM)控制系統(tǒng)具有非線性和多變量的特性,傳統(tǒng)的PID難滿足系統(tǒng)的要求,文章采用改進遺傳算法優(yōu)化PID控制器,并應用到雙閉環(huán)BLDCM控制系統(tǒng)中去,通過仿真實驗,發(fā)現(xiàn)能夠非常精準的控制,適應性也較強。
關鍵詞:遺傳算法;PID智能控制器;無刷直流電機
無刷直流電流的應用非常廣泛,但傳統(tǒng)的控制器難解決無刷直流電機的時變性、非線性等特性,引進智能控制器PID非常有必要。智能控制可以解決許多傳統(tǒng)控制不了解決的問題,同時數(shù)學復雜性又不是非常高,將智能控制引入無刷直接電機控制系統(tǒng)是毋庸置疑的。智能控制的常用算法有人工神經(jīng)元算法和遺傳算法等,文章提出一種改進的遺傳算法,對無刷直流電機的PID智能控制器進行優(yōu)化,解決無刷直流電機的難題。
1 雙閉環(huán)BLDCM控制系統(tǒng)
雙閉環(huán)電刷直流電機控制系統(tǒng)是電刷直流電機的重要組成部分,實現(xiàn)電機的正轉(zhuǎn)和反轉(zhuǎn)的操作,電刷直流電機控制系統(tǒng)通常采用AT29C51單片機,實現(xiàn)電動機的控制操作。但傳統(tǒng)的控制系統(tǒng)存在響應速度慢和魯棒性等現(xiàn)象。雙閉環(huán)BLDCM控制系統(tǒng)由三相PWM逆變器、速度控制器和電流滯環(huán)控制器三個部分組成,通過一個電流環(huán)和一個轉(zhuǎn)速環(huán)控制電刷直流電機,精度,響應時間和魯棒性都非常好。雙閉環(huán)BLDCM控制系統(tǒng)控制框圖如圖1所示。
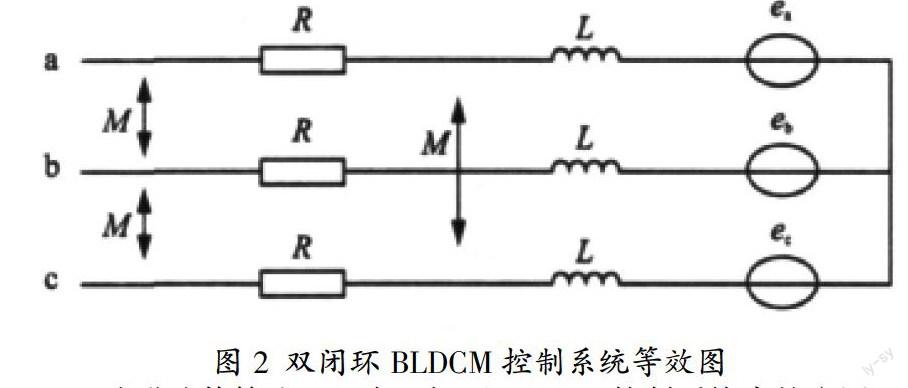
雙閉環(huán)BLDCM控制系統(tǒng)的數(shù)學模型直接對控制系統(tǒng)進行建模,傳統(tǒng)的算法是人工神經(jīng)無算法或遺傳算法,文章提出一種改進型遺傳算法,有利于智能控制的優(yōu)化。雙閉環(huán)BLDCM控制系統(tǒng)的數(shù)學模型由等效圖決定。雙閉環(huán)BLDCM控制系統(tǒng)等效圖如圖2所示。
2 改進遺傳算法PID在雙閉環(huán)BLDCM控制系統(tǒng)中的應用
2.1 傳統(tǒng)PID算法
在計算機控制中,只能根據(jù)采樣時刻的偏差值計算控制量,因此,一般使用數(shù)字PID,以下增量式數(shù)字PID:△u(k)=kp[e(k)-k]+kie(k)+kd[e(k)-2e(k-1)+e(k-2)],其中,kp,ki,kd分別為比例,積分,微分系數(shù)。
2.2 改進遺傳算法PID
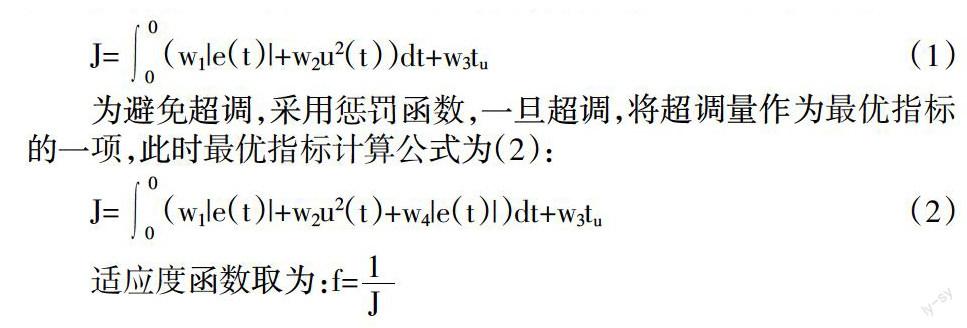
為了獲得滿意的動態(tài)過程,采用誤差絕對值時間積分性能指標作為參數(shù)選擇的最小目標函數(shù)。為防止控制量過大,在目標函數(shù)中加入控制輸入的平方項。選公式(1)作為參數(shù)選取的最優(yōu)指標。
2.3 仿真實驗
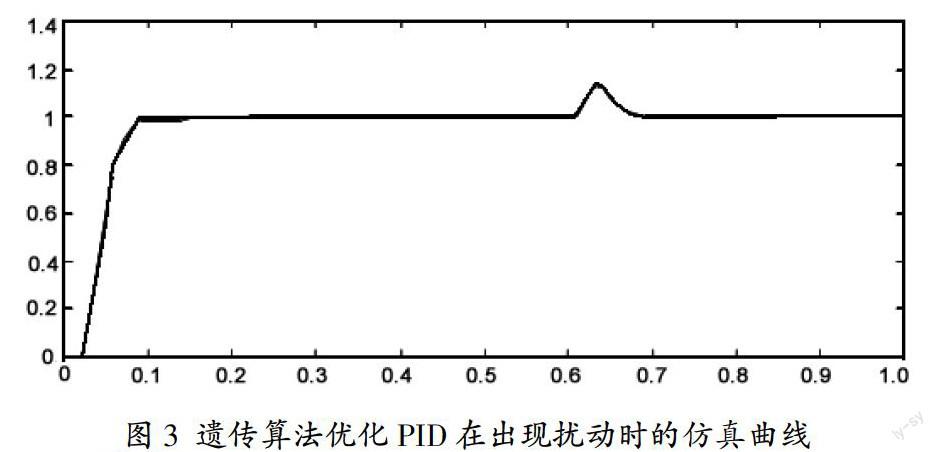
通過等效圖建立數(shù)學模型,按照常規(guī)工程設計方法計算控制對象的傳遞函數(shù)為:415/s2+90s,遺傳算法中使用的樣本個數(shù)為30,進化代數(shù)為60,w1=0.956,w2=0.002,w3=2,w4=60。優(yōu)化后的參數(shù)kp=2.879,ki=0.0524,kd=0.029,性能指標J=4.5785。優(yōu)化后的PID控制的階躍響應以及負載突變的響應曲線如圖3所示。
3 結束語
總之,將改進遺傳算法應用到無刷直流電機的控制系統(tǒng)中,可以較好的控制參數(shù)的適應性和魯棒性。改進遺傳算法PID只關注控制對象的輸入與輸出情況,解決了傳統(tǒng)控制器解決不了的問題,提高了傳統(tǒng)控制器的精度。改進遺傳算法PID實時控制過程中并沒有復雜的運算,運算響應速度較快,應用到無刷直流電機的控制系統(tǒng),經(jīng)濟效益和實用價值都比較高。
參考文獻
[1]國珍.改進遺傳算法在無刷直流電機調(diào)速系統(tǒng)PID參數(shù)優(yōu)化中的應用[J].組合機床與自動化加工技術,2013(7).
[2]武志勇,郭宏,呂振華,等.基于遺傳算法的雙余度無刷直流電機優(yōu)化設計[J].北京航空航天大學學報,2011,37(12):1541-1545+1568.
