控制方向未知的非線性時滯系統的迭代學習控制
2015-05-30 12:52:35李廣印
企業技術開發·下旬刊 2015年3期
李廣印


摘 要:文章對于一類含有未知控制方向的非線性時滯系統,設計了自適應迭代學習控制算法。在設計控制算法過程中采用了信號置換思想來處理系統中出現的時滯項,Nussbaum增益技術解決未知控制方向等問題。對于系統中出現的未知時變參數和時不變參數,分別設計了差分及微分參數學習律對參數進行估計。然后通過構造的Lyapunov-Krasovskii復合能量函數對系統進行了收斂性分析。證明了狀態輸出沿著迭代方向對期望輸出的漸進跟蹤及閉環系統中所有信號的有界性,最后通過一個仿真實例驗證了所設計控制算法的有效性。
關鍵詞:時滯;信號置換;未知控制方向;Nussbaum增益技術
中圖分類號:TP13 文獻標識碼:A 文章編號:1006-8937(2015)09-0054-02
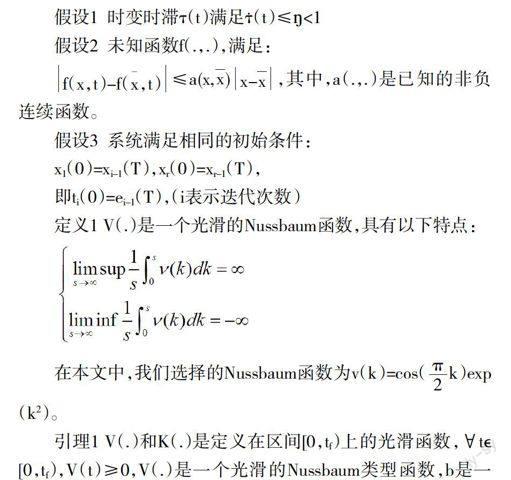
1 問題描述
5 結 語
針對一類含有未知控制方向的非線性時滯系統,采用Nussbaum增益技術及信號置換思想,解決了系統中存在的控制方向未知和時滯的問題。
同時設計了自適應迭代學習控制算法,實現了跟蹤誤差沿著迭代軸的方向對期望輸出的跟蹤,并保證了閉環系統內所有信號的有界性。
仿真結果說明了該方法的可行性。
參考文獻:
[1] 陳為勝,王元亮,李俊民.周期時變時滯非線性參數化系統的自適應學習控制[J].自動化學報,2008,(10).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
