機器人主動自組技術研究
2015-05-30 07:28:13付胡代楊松趙憲女李薇薇
科技創新與應用 2015年29期
付胡代 楊松 趙憲女 李薇薇

摘 要:文章討論了使用組裝代理,也就是機器人的主動自組技術方法。它展示了這樣一種機器人的群組機制,在群組中,機器人只需要通過很簡單的信息通訊就能夠編程產生整體或局部的特定結構,在生成的過程中可能會損失一些組件或結構。這種組裝代理只有很小的記憶和通訊要求,而且只在接觸時發生通訊。
關鍵詞:機器人;群組;主動自組
1 概述
自組技術產生的人造結構大都是對稱結構的,可是絕大多數應用都要使用非對稱結構。比如說,一個典型的自裝配的單層結構只能均勻地覆蓋一個給定的平面。另外,被動自裝配的組件是“硬件編程”的,換句話說,這些組件本身必須被放置在建立系統所需的正確連接地點。主動自組技術組件在通常意義上是可以編程控制的,這也是其優于被動自組組件的主要方面。
2 對組裝代理的要求
為了實現以上的一系列算法,每個組裝代理都必須有以下的能力:(1)儲存和執行一個有限的狀態機;(2)與結構中鄰接的組裝代理交換當前狀態;(3)接受鄰接的組裝代理發來的信息并將其轉發至其他若干個鄰接代理;(4)維持一個記錄轉發次數的計數器;(5)在物理層面上附加到其他組裝代理上;(6)執行周期性行動;(7)實現隨機路線移動。
3 通訊
當組裝代理擁有了與鄰接代理通訊的能力之后,群組又擁有了重要的新能力。某一個組裝代理的當前狀態總能夠通過通訊與鄰接的代理進行交互。另外,組裝代理可以發送信息。這些信息被定義為非狀態信息從一個代理發送到另一個。本研究中所使用的信息是一個一系列預定義的計數值的子集,但這些包含了數據域的信息是可以得到的。
信息根據獨立的組裝代理的通訊狀態而不同,代理不會向所有方向發送同樣的信息。組裝代理通常會將信息發送到與源代理方向相反的鄰接代理。這種機制使信息有了方向性,這是文章討論的技術所必須的。
4 實驗
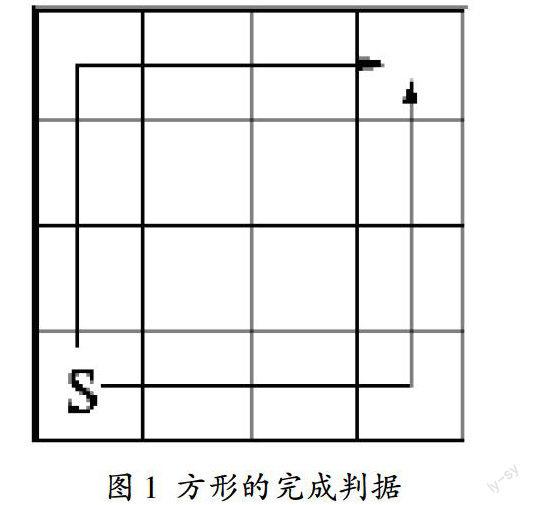
文章建立并測試了以下建立基本形的狀態機:方形、矩形、近似的三角形。每一個基本形的狀態機的大小取決于所生成的形狀的大小。分別如圖1、圖2和圖3所示。
生成方形的狀態機從一個角上的種子開始生成整個結構。如圖1所示,種子所在的方形標有“S”標記。種子生成垂直的兩行組裝代理,行的長度由在代理間傳遞的消息攜帶的計數值控制。
矩形從一個末端的種子開始生成整個結構。種子產生單獨的一排,這排代理構成矩形較長的一排。一旦這一排就位,代理就一層一層地附著在上面直到矩形達到預定寬度。寬度是由從中間排的組裝代理發出的垂直于長軸的消息度量的,其方法是檢查消息攜帶的跳轉計數。每一層都是從種子末端開始的,所以最后兩個加入結構的代理將會是離種子最遠的兩個角點。
三角形從直角頂點開始生成整個結構。像方形一樣,一個三角形由構造網狀的L形生成,但是當構成三角形每個的臂時候每個L形比其鄰接的L少兩個組裝代理,而不像矩形那樣只少一個。消息的傳遞方式和方形的解決方案是一樣的;區別僅在于當方向改變的時候跳轉計數的編輯方法不同。
5 結束語
簡單機器人的集群可以通過編程使之自動組成目標結構,例如給定形狀之間的連線,包括矩形、三角形。組合圖形等在內的基本形。這些機器人擁有很小的內存、簡單的執行機構,還可以在發生物理接觸的時候用非常有限的消息進行通訊。因此解決了通過主動自組技術生成復雜結構的可能性,而這正是適合于批量生產的本質上的并行過程。
參考文獻
[1]朱順利.基于行為的自主清掃機器人的研究[D].江西理工大學,2008.
[2]王醒策.基于強化學習的多機器人編隊方法研究[D].哈爾濱工程大學,2002.
[3]陶恒銘.六自由度工業機器人運動分析與控制技術的研究[D].合肥工業大學,2014.
[4]苗登雨.重載搬運機器人結構設計與動態性能分析優化[D].合肥工業大學,2014.
作者簡介:付胡代(1977-),女,漢族,吉林人,碩士,研究方向:機電工程與智能檢測。