基于模糊控制的配電網電壓跌落補償控制策略研究
2015-05-30 07:28:13鄭文張運波紀秀
科技創新與應用 2015年29期
鄭文 張運波 紀秀
摘 要:文章介紹了用于配電網電壓跌落補償的動態電壓恢復器(DVR)的基本結構,DVR對逆變器的控制要求,提出基于模糊控制的配電網電壓跌落補償控制策略。經仿真實驗驗證了其控制性能。
關鍵詞:配電網電壓跌落;動態電壓恢復器;補償;模糊控制
隨著科技的發展與社會的進步,基于計算機和微處理器為控制核心的各種電力電子設備等敏感負荷,在電力系統負荷中所占比例呈增加的趨勢,這些敏感負荷對電能質量的要求越來越高,它們對配電網的電壓突變,比傳統的設備更加敏感,甚至不能保證正常工作。電壓突變是現代電能質量問題中的核心部分,它產生了日益嚴重的危害,受到了配電網及用戶越來越多的關注。
1 動態電壓恢復器的系統結構
電壓凹陷(Voltage Sag)也稱為電壓瞬時跌落(Voltage Dip)。根據國際電氣與電子工程師協會(IEEE)的定義,電壓瞬間跌落是指電力基波電壓有效值迅速下降到額定值的10%-90%,持續時間為10ms到幾秒鐘的電力現象。電壓跌落通常以跌落幅值、持續時間和跌落電壓的相角躍變來進行描述。
配電網動態電壓恢復器(Dynamic Voltage Restorer, DVR)是對電壓進行補償的電力電子裝置,發生電壓跌落時,DVR能在5ms內瞬間做出反應,進行快速補償。
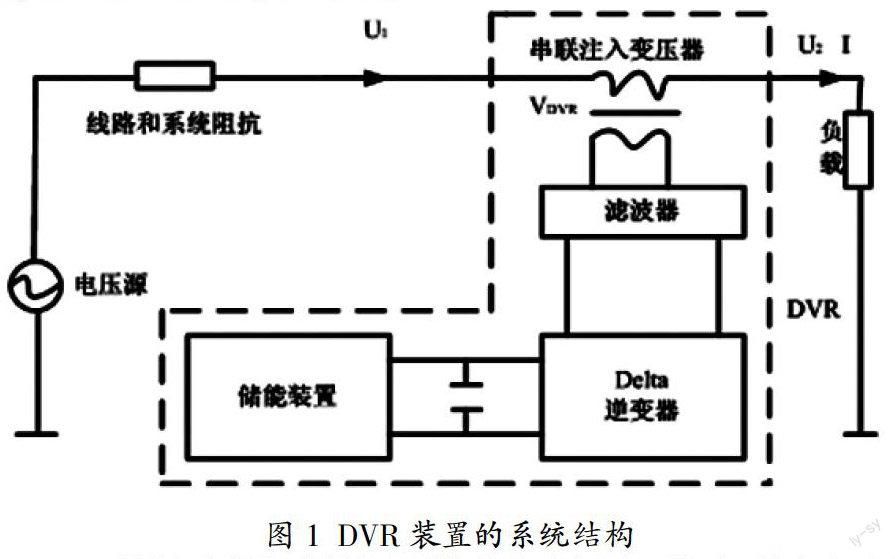
DVR(圖中虛線部分)接入系統的方式如圖1所示。其主電路包括儲能裝置、Delta逆變器、濾波器和串聯注入變壓器四個部分。Delta逆變器是DVR裝置的核心,它接在電網與負載之間起調節電壓源的作用。當配電網提供電壓與敏感性負荷的需求不一致時(由檢測模塊實現),由逆變器產生電壓來補償用戶側電壓的跌落,保證敏感負荷正常運行。
2 DVR對逆變器的控制要求
當系統電壓發生跌落時,逆變器驅動功率模塊,輸出補償電壓,該電壓與電網電壓疊加,以保證負載側電壓正常,能夠正常工作。逆變器控制策略的選取將會直接影響DVR裝置的性能,工業領域常采用線性或者非線性控制方式。保證輸出電壓與電網電壓同頻率、同相位、同幅值,而且其輸出應是失真度小的正弦波。一般的PID控制適用于線性系統,但DVR的逆變器本身就是非線性器件,對于系統數學模型不明確、參數不穩定的控制對象,線性控制方法有很大的局限性,而基于神經網絡、模糊控制等的非線性控制方式則具有更好的適應性。
3 基于模糊控制的配電網電壓跌落補償控制策略
針對DVR裝置非線性的特性,同時為了提高DVR控制系統的動態響應速度,改善負載調節特性以及穩定裕度,在DVR控制策略中應用模糊控制。模糊控制具有較強的魯棒性,對參數變化、非線性因素等均不敏感,可以滿足系統負載調節特性。文章提出了將模糊自適應PID控制策略應用于DVR裝置的電壓補償模塊。
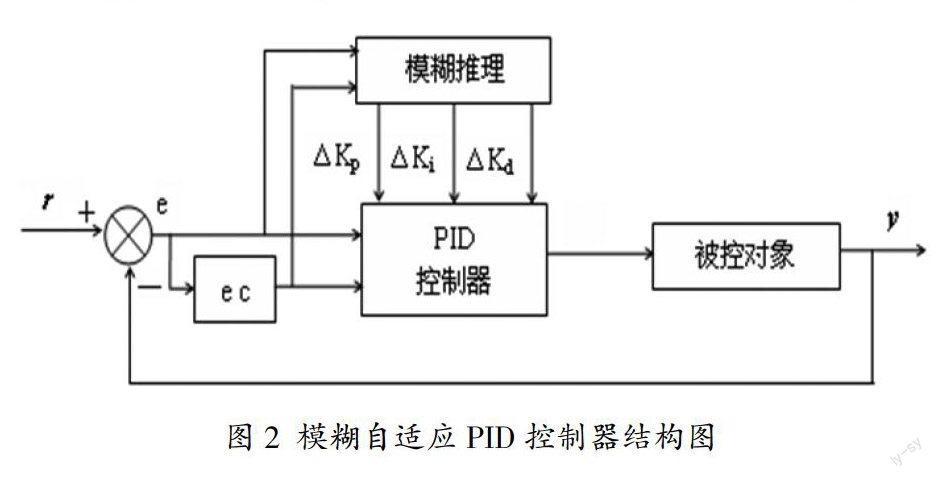
模糊自適應PID控制器以工程人員控制經驗總結出的控制規則為核心,基于系統目前的運行狀態,由模糊推理、模糊判決、解模糊過程實現對被控對象的在線控制。它能自動調整PID參數Kp、Ki、Kd,實現對PID參數的最優配置,從而獲得更強的適應性。建立一個雙輸入三輸出的模糊控制器,其結構如圖2所示,選取電網標準電壓與敏感性負載電壓的偏差e和偏差變化率ec作為模糊控制器的兩個輸入,輸出量為PID參數增量ΔKp、ΔKi、ΔKd。設定輸入e和ec的模糊集合論域分別為[-1,1]、[-0.5,0.5],設定輸出的參數增量ΔKp、ΔKi、ΔKd的模糊集合論域分別為[-3,3],[-3,3],[-0.2,0.2]。系統輸入輸出語言變量均選取7個語言值,即:PB(正大)、PM(正中)、PS(正小)、ZO(零)、NS(負小)、NM(負中)、NB(負大)。選擇各語言變量論域上用以描述模糊子集的隸屬函數為正態分布函數,從而可以得到各模糊變量的賦值。
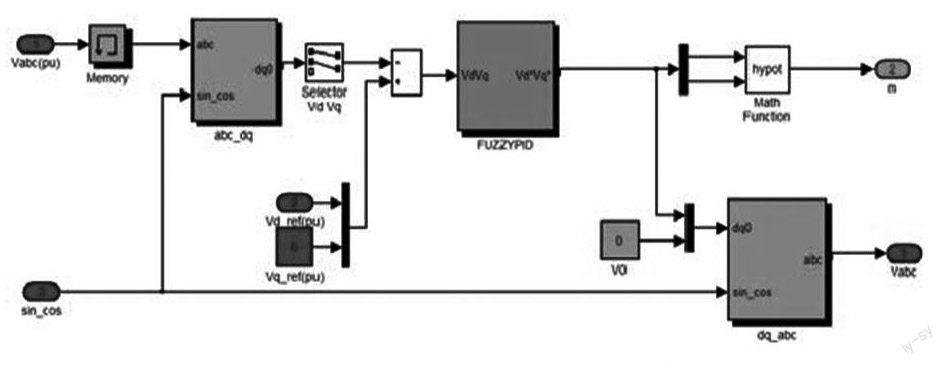
在DVR裝置中,通過配電網電壓跌落檢測模塊進行電壓跌落的判斷與檢測,利用模糊控制算法對逆變器進行控制,實現對電壓跌落的補償,其仿真系統圖如圖3所示。
4 結束語
在Matlab環境下進行仿真實驗表明,當電源電壓0.05s時發生25%電壓暫降,通過模糊自適應PID控制進行電壓補償,負載側0.05s時電壓補償到暫降前電壓的95%,0.06s時補償為暫降前電壓值,近1/4周期即實現完全補償。模糊自適應PID控制的穩定性好,穩態誤差小,響應速度快,對系統參數變化具有較好的魯棒性。可見,將模糊控制應用于配電網電壓跌落補償控制是可行有效的。
作者簡介:鄭文(1972-),女,碩士,教授,主要從事電力系統及其自動化方面的研究。