歐洲貓自動化系統ADS—B多傳感器跟蹤處理淺析
2015-05-30 08:28:13張科晶
企業技術開發·中旬刊 2015年10期
張科晶
摘 要:隨著我國民用航空業的迅速發展,為加大對安全生產的保障力度,滿足我國民用航空發展的需要,適應國內空域情況的復雜性,ADS-B作為新技術在空中交通管制自動化有著廣泛的應用空間。
關鍵詞:歐洲貓;ADS-B;跟蹤處理
中圖分類號:V447 文獻標識碼:A 文章編號:1006-8937(2015)29-0073-03
1 ADS-B概述
1.1 ADS-B的優勢
ADS-B技術有以下幾方面的優點。
①數據更新快。
相比雷達監視,ADS-B對監視目標提供更快的報告刷新速率(<1 s),更準確帶位置/速度信息的航跡(基于GPS/FMS計算),和將來航跡趨勢(基于FMS),有利于較大提升航跡計算精確度,提供給管制員更準確軌跡顯。
②信息更豐富。
機載ADS-B發送信息:識別(ICAO24位地址,呼號)、狀態向量:位置、高度、完好性和精度質量指示符、速度、航向、飛機狀態(緊急狀態)、目的地(下一導航點)等。
③目標位置精度高。
航空器是由機載星基導航和定位系統生成的精確定位信息。使用的為GNSS -全球導航衛星系統:裝有ADS-B機載設備航空器的識別以及基于ADS-B和/或SSR最小側向間隔(5NM)。
④成本低廉。
單機站建設成本不到航管二次雷達的十分之一,且作用距離為250 KM(134 NM),目標處理能力為500 s。
1.2 ADS-B地面站與空管自動化設備的連接
在中高流量和有雷達空域提供空管監視,作為雷達的補充或潛在替代手段,融合全部傳感器的單一系統航跡,融合全部有關下行數據,跟蹤更精確。
2 多傳感器追蹤處理
2.1 多傳感器追蹤處理簡介
在Thales V5軟件升級后,因其接收處理的數據不再局限于雷達數據,MTP退出舞臺,轉登場多傳感器追蹤處理功能Multi Sensor Tracking Function(MSTS)。該功能模塊接收并處理監視數據,不再僅僅局限于雷達數據(一、二次雷達,S模式SSR數據)同時也能夠處理ADS-B報告。處理完畢后以ASTERIX CAT 62格式進行數據分發。MSTS跟蹤單架飛行器的航跡信息時,結合每個傳感器(雷達,ADS-B,WAM)接收的數據,系統進行融合后發揮各自傳感器的最佳優勢,并消除其各自缺點。
多傳感器跟蹤功能相較于曾經MTP使用一個基于交互式多模型(IMM)的卡爾曼濾波變量更新技術,高質量的多傳感器跟蹤算法在融合算法的準確性、一致性和響應時間有很大的提升。多傳感器交互式多模型濾波算法使用三層擴展卡爾曼濾波算法(EKF)。
多傳感器交互式多模型濾波算法可以模擬三個過渡模型:
①具有恒定直線速度飛行器運動(EKF1);
②具有恒定轉動率飛行器運動(EKF2);
③具有恒定縱向加速度飛行器運動(EKF3)。
這種多傳感器的所謂的變量更新的概念基于:持續的空中態勢的更新,因為每個傳感器提供的所有數據當其收到時就盡快處理(或異步增量更新)。
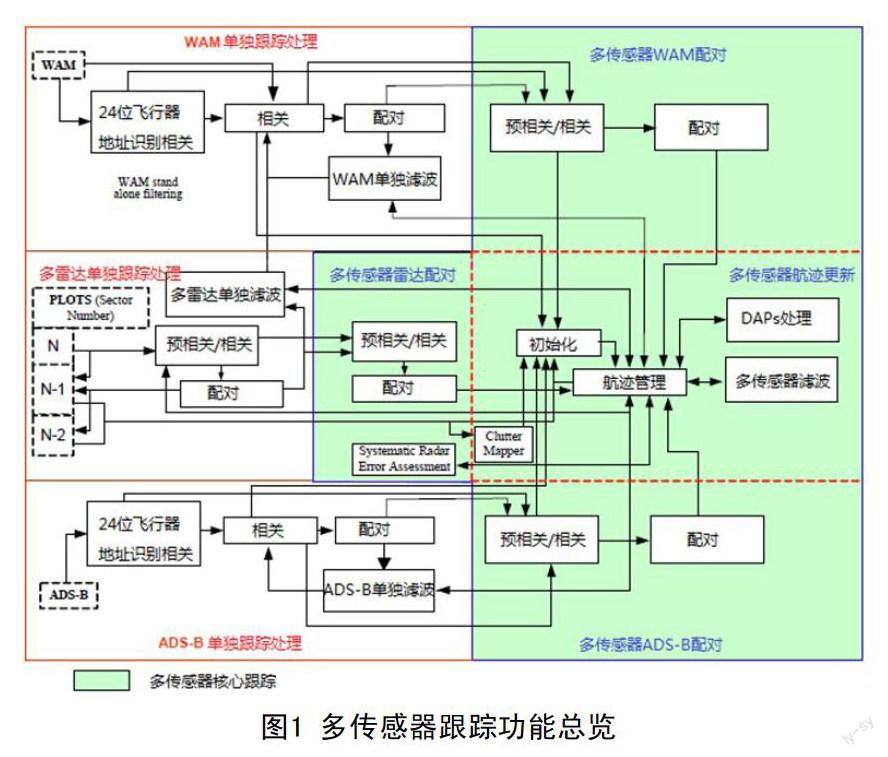
多傳感器追蹤處理常用處理方式分為:ADS-B/多雷達/WAM單獨跟蹤處理(ADS-B Stand-Alone Tracking)、多傳感器(ADS-B/多雷達/WAM)航跡配對、多傳感器航跡更新三部分。多傳感器跟蹤功能總覽,如圖1所示。
單獨跟蹤處理功能:傳感器數據的接收觸發多傳感器跟蹤功能。 所謂的傳感器數據為:ADS- B報告,WAM報告,雷達點跡和跟蹤等。ADS- B數據報告的預處理,以檢查傳入的ADS - B報告的一致性和完整性為主(錯誤檢測)。系統航跡中的ADS-B信息的處理是基于使用卡爾曼濾波功能獨立的ADS- B單獨跟蹤處理。
多傳感器航跡配對(association):雷達、ADS-B及WAM報告將會在其單獨跟蹤模式下進行配對,再在多傳感器交互式多模型狀態向量的比對下檢查并確定與系統航跡進行配對。
多傳感器航跡更新:已配對的傳感器報告更新航跡時,使用傳感器測量位置的報告,根據不同傳感器類型分為:-測量ADS - B的報告的向量組成的緯經度,速度方向矢量或氣壓高度。
2.2 ADS-B航跡預處理(ADS-B Stand-Alone Tracking
單獨跟蹤處理)
2.2.1 ADS-B相關功能
對于雷達,ADS-B地面站及WAM系統,都擁有自己的預相關/相關(pre-correlation/correlation),配對(association)功能模塊。
將接收到的報告航跡與本地系統航跡(外推點)關聯的手段叫做跟蹤(Tracking)。跟蹤分為三步: Correlation(相關),Association(配對)。
以下主要介紹ADS-B的相關功能:ADS - B單獨跟蹤處理周期定于接收ADS - B報告的時刻。當收到ADS-B報告,報告將立即單獨處理,以避免引入任何處理延遲。
2.2.2 ADS - B的處理報告
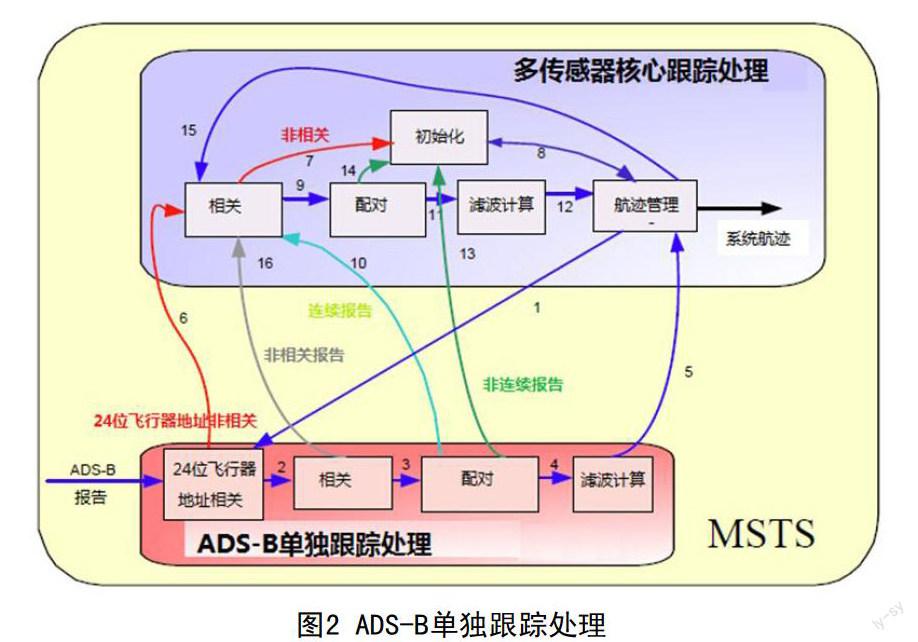
接受ADS - B的報告后,ADS - B的獨立跟蹤開始處理。在此過程允許ADS – B報告將會與先前收到的ADS - B報告進行一致性檢查,ADS-B單獨跟蹤處理,如圖2所示。
①收到的ADS-B報告需與使用有效的ADS-B單機跟蹤狀態的系統航跡進行配對(association),什么是有效的?使用具有唯一性的24位飛行器地址(aircraft address)。
②當ADS-B報告能夠進行配對時,則進行錯誤檢測驗證本報告的ADS-B獨立跟蹤狀態(錯誤檢測:以檢查傳入的ADS - B報告的一致性和完整性)。
③當ADS-B報告不能基于24位飛行器地址的系統航跡配對時,此份ADS-B報告即認為非相關。非相關報告將會發送到多傳感器內核跟蹤監視嘗試基于多傳感器狀態進行航跡相關。
④當ADS-B報告沒有通過錯誤檢測被認為其為非連續報告,并將其發送到多傳感器初始化功能模塊。
⑤連續性ADS-B報告使用卡爾曼濾波算法更新航跡,并且將結果發送到多傳感器相關功能模塊。
2.3 多傳感器航跡配對與融合-核心跟蹤功能(Multi-
Sensor Kernel Tracking Function)
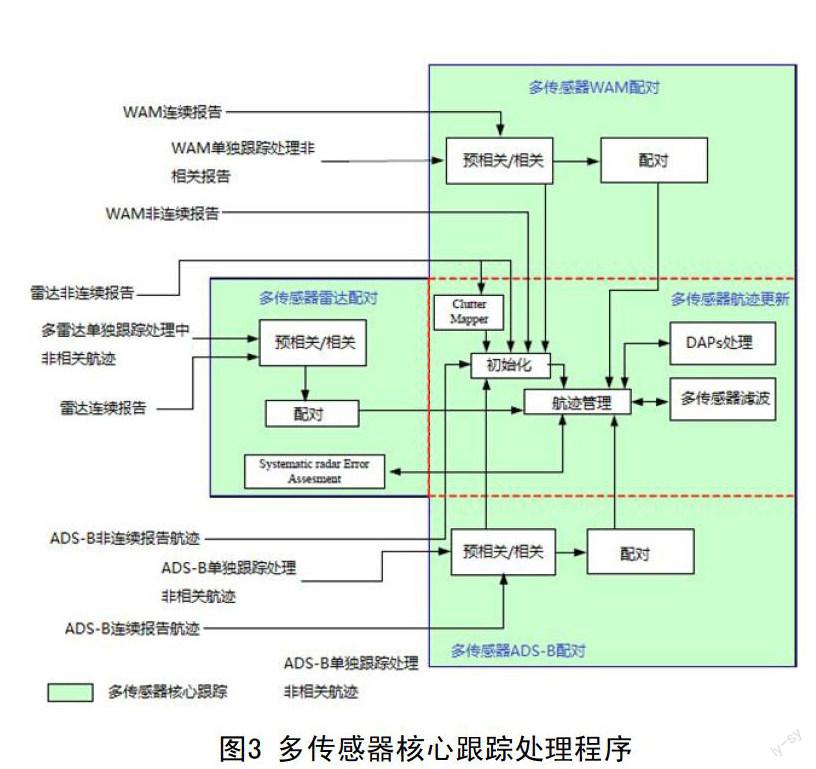
多傳感器核心跟蹤功能,旨在將系統到同一飛行器的被雷達,ADS-B地面基站信息及WAM系統所監視到的特有航跡融合為系統航跡。多傳感器核心跟蹤處理程序,如圖3所示。
處理流程:預相關(pre-correlation),相關(correlation),配對(association),航跡更新,DAP處理、航跡初始化,航跡管理。2.3.1 多傳感器預相關(ADS-B)。
不能與ADS-B報告航跡相關的航跡拋棄。
ADS-B報告航跡為中心點設定一個扇區,扇區的大小取決于:ADS - B的測量標準誤差及對飛行器運動性能來說最近一次更新與外推點的最大范圍。建立直角坐標系(Dx,Dy,Dz)表示,考慮全球定位系統檢測標準偏差,在直角坐標參考表示監視航跡協方差矩陣及最大飛行器加速能力。在不引入任何位置誤差的情況下,將從大地測量的ADS-B報告位置坐標通過WGS84坐標轉換。
多傳感器預相關功能選擇的標準非常簡單:盡快排除法對應到選定的系統航跡的傳感器報告。經過預相關處理后,每個選定的系統航跡能夠與一系列的預相關的ADS-B報告航跡相配對,同時每個選定ADS-B報告航跡能夠與一系列的預相關的系統航跡相配對。無論是在ADS-B單獨跟蹤處理中報告航跡相關或非相關的,都將傳送到多傳感器預相關功能。
2.3.2 多傳感器相關功能(Multi-Sensor Correlation Function)。
對于ADS - B報告航跡的單獨處理,這個功能是用來拒絕不能與本報告配對的預相關系統航跡。
對每個可能的報告航跡-系統航跡對(或系統航跡-報告航跡對),計算一個評估隸屬度(似然度-likelihood),該值評估ADS-B報告航跡對應的系統航跡的概率。這種概率方法基于貝葉斯理論和卡爾曼濾波算法。
評估隸屬度的計算,還有一些ADS-B報告航跡的附加屬性,即是否相關的決定性因素:SSR一致性,24位飛行器地址一致性,飛行器識別的一致性,獨立處理時配對的質量因素,也會根據其他傳感器的標準屬性(速度、點跡質量,跟蹤點跡的航跡號等)綜合判斷。
在相關階段的末尾,根據評估隸屬度的計算及作為24位飛行器地址一致性,每個ADS-B報告航跡與系統航跡之間的建立相關鏈接。在下一個相關階段,可能性最高的值,將會成為相關唯一鏈接,其他相關鏈接將會被拋棄。
2.3.3 多傳感器的配對功能( Multi-Sensor Association Function)
配對處理解決一對多和多對一相關沖突問題,達到航跡一一配對。
利用最近鄰概率配對技術,使用相關隸屬度找到最佳航點跡配對。其他相關連接涉及點跡航跡的,將會被拋棄。
ADS-B當一份報告沒有相關到任何系統航跡,這份報告將會送到多傳感器初始化處理功能模塊中。
2.3.4 多傳感器的濾波計算功能(Multi-Sensor Filtering Function)
完成配對的點跡用以更新多雷達航跡。系統使用勻速自適應kalman濾波器更新航跡的運動屬性。
多傳感器交互式多模型濾波算法更新的系統航跡的運動屬性。自適應卡爾曼濾波算法通過調整目標運動屬性來跟蹤機動目標。在航跡更新前計算點跡與航跡外推點跡的統計距離,距離大于統計門限的原因,相應地多假設跟蹤方法給出兩種多雷達航跡,最后選擇一種航跡。
2.3.5 多傳感器初始化功能(Multi-Sensor Initiation Function)
當傳感器發現不配對的報告航跡時,即傳送至初始化功能模塊,進行創建并確認可能性監視航跡。
初始化處理包括預相關,相關,配對,航跡更新。初始化航跡需要計算評估隸屬度,以判斷該航跡的真假。基于Bayesian的判決決定航跡被確認或者拋棄。每個新航跡都分配一個唯一的航跡號。新建的航跡經過初始化后,成為確認航跡,方能更新。
3 ADS-B展望
ADS-B的推廣應用在十二五規劃中,將在全國范圍內建設41套ADS-B地面站,并進一步推廣其應用,作為區域雷達監視的補充手段,增加對洋區的航空監視能力擴大對洋區的航空監視覆蓋區域。在終端區,能夠提供較雷達定位更精密的位置信息。作為本場低高度區域,在雷達覆蓋不到區域能夠進行高精度定位,可有效的縮短飛行器間隔,管制得到更加全面、準確、完善的空域狀況,通過自動化系統更為有效的對整體空域進行指揮調配。
參考文獻:
[1] 中國民航局飛行標準司.廣播式自動相關監視(ADS-B)在飛行運行 中的應用[R].2008.
[2] EUROCAT-X,System/Segment Specification REV A[S].
