SIR—S型二次雷達事件發生器板故障定位與分析
2015-05-30 10:48:04但強
中國新通信 2015年10期
但強
【摘要】本文首先介紹了SELEX SIR-S二次雷達系統組成及監控方式,然后詳細描述吳忠二次雷達VME事件發生器板故障案例中的故障定位處理過程,多重分析故障可能性使故障得以排除,為該型號雷達RPCM組件類似故障定位及處理積累了經驗。
【關鍵詞】SIR-S 事件發生器 故障定位 RPCM
引言
吳忠二次雷達型號為SIR-S,是由意大利SELEX公司設計生產的具有S模式功能的單脈沖二次雷達。SIR-S為雙通道配置,可進行主備機自動切換或手動切換。吳忠SIR-S雷達設置的作用距離為200海里,最大作用距離為256海里,主要為西部航路區域管制提供雷達信號。吳忠雷達站是為了適應我國民航事業發展的需要加強空管系統整體功能及可靠性,全面提升空管保障能力的重要工程,是解決西部航路雷達管制和歐亞航路平行航路建設的主要部分,也對解決寧夏區域空管監視問題,以及軍、民航飛行沖突的起著重要作用。該型雷達國內安裝數量相對較少,本文就對近期SIR-S二次雷達的一次應答處理及通道管理組件中VEG板故障進行分析。
一、系統組成及監控方式
1.1 系統組成
SIR-S為雙通道系統,互為冗余備份,每個通道都包括五大模塊:切換單元,電源單元,應答處理和通道管理單元(RPCM),接收機單元,發射機單元。切換單元change-over為共用,完成對通道的切換功能。其中RPCM組件又由以下板件組成:主處理器板(PowerPC MVME 5500),并行輸入輸出控制器(IP CARRIER),VME事件發生器(VEG),應答處理器(REP),視頻接口模塊(VIM)。應答處理器和通道管理組件(RPCM)主要完成的功能有與霄達頭處理器(RHP)進行數據交換,計時,詢問模式選擇管理,應答處理和相關,外部單元管理,BITE管理等。
1.2 系統監控方式
SIR-S系統吳忠二次雷達的監控方式包括RCP及LCMS。RCP即雷達系統的本地控制端,主要作用是提供一個友好的界而用于對天線、發射機和接收機設備控制、其他系統進行通信、執行BITE功能以及對系統性能進行監控。LCMS即本地控制與管理系統,可以通過圖形化界面的顯示,監視雷達系統各個模塊的運行狀態,通過不同顏色的圖形界面予以顯示。除此之外,我們也可以通過板件指示進行初步判斷:當系統中的一塊板子發生故障時,最直觀的指示便是機柜中板子上的告警指示燈,觀察其是否有異常。同時系統還配備了雷達監視管理系統RMM,雷達頭數據處理器RHP控制端。
通過以卜介紹,可以看到吳忠二次雷達可通過板件自身指示、LCMS和RCP等有著多種方式,幫助我們定位故障點,進行故障排查。
二、故障分析
2.1 故障現象
為了快速定位故障點,根據SIR-S系統的特點及監控方式,分別發現了以下現象:
1)LCMS監控端:LCMS上顯示二次雷達RPCM組件中,PPCA板件紅色告警。通過LCMS診斷日志上可以看到診斷日志如下:
LCN 2 CND:SSA:SSR RPCM A General Failure
LCN 2 CND:RPA:SSR Power PC A Failure
2)RCP雷達控制端:RCP主面板上顯示Chan和RPCM告警,RPCMAL ARM中可發現RPCM GEN.FAIL告警,持續觀察可發現FCRI OR W-DOG FIRFD告警時有時無。
3)板件指示:RPCM組件中的主處理器板,并行輸入輸出控制器,VME事件發生器,應答處理器,視頻接門模塊等板件指示燈均正常,沒有故障燈顯示出FATL狀態即故障狀態。
4) RMM顯示正常,RHP工作正常。通道B為主用,工作正常。
2.2 故障分析
通過觀察以上故障現象,我們可以判斷問題出現在通道A,可借助LCMS,RCP等系統監控手段進行定位,根據故障指示燈進行相應處理。
第一步,檢查是否是線路松動或主處理器死機的原因。設備長期運行,部分線路可能松動。對通道A的RPCM各組件的連線和接口仔細檢查并緊固,然后重啟通道A。同時在RCP通道A的BITF信息欄和日志中觀察沒有故障事件記錄。但故障燈指示依然存在,表明并非這個原因。
第二步,判斷是否為板件故障。
1)根據LCMS中板件的告警指示,可判斷為RPCM中POWER PC MVMF5500組件故障,即RPCM組件的主處理器故障。
2)再根據RCP上的RPCM CEN.FAIL,根據廠家維修手冊說明,此燈亮則建議替換POWER PC MVME5500,由此再次判斷為POWER PC MVME5500板件故障。
通過LCMS和RCP告警指示,都將故障定位于POWERPC MVME5500,所以立即用備件更換POWER PC MVME5500板件。然而,更換上對應通道A的PPCA板以后,故障現象依然存在。
第三步,對于更換完備用POWER PC MVMF5500仍顯示故障,懷疑監控軟件是否有問題。
1)對于更換備用板件后依然出現相同的故障信息,即PPCA故障,懷疑監控軟件可能出現問題,重啟RCP本地控制端軟件,依然指示有故障。
2)為再次確認是否通道A更換板件后已正常,排除軟件故障的可能性,做好信息通報后,將通道切至A通道(之前主用為B),切至A通道后,發現通道A輻射關閉,同時RMM上只存有一次雷達點跡并無二次雷達點跡。切回B通道,工作正常。由此排除了軟件故障的可能性,某塊板件肯定出現了問題。
經歷前三步的故障定位,重新整理思路。LCMS和RCP都將故障指向了PPCA板,但是更換備件后故障現象卻依然存在。可能故障點并非PPCA板,遂將A通道原來的PPCA板換下備件PPCA板。在RCP的指示燈告警中,有個FCRI OR W-dog Fired告警,或許這個告警是個突破口。根據維修手冊的步驟,在RCP中的選擇PROTECTION RESET,并無響應。隨后在PPCA板上按RESET鍵,隨后PPCA離線自檢,自檢完成后,設備上板件指示燈正常。在TRANSMITTER DETAILED ALARM DISPLAY PACE中并無發現有告警事件記錄,需要繼續定位故障點。FCRI OR W-dog Fired是LCMS和RCP中一個并不是指示PPCA板故障的告警,繼續查找與RPCM組件中其他板件的聯系。
進一步分析發現,RPCM組件中,watch-dog也VME事件發生器板(VEG)聯系緊密。VEG板產生時間事件,進行內部事件解碼,同時進行對watch-dog邏輯控制及內外部觸發的控制。由此,懷疑VEG/VSB組件可能出現問題,如果VEG故障則可能使LCMS及RCP軟件監控信息不準確,導致RCP、LCMS均將故障矛頭指向主處理器PPCA。同時VEG的watch-dog邏輯控制功能發生錯誤,可能就是導致W-dog fired告警的原因。根據以上分析,推測VEG板故障。
2.3 故障排除
定位出可能的故障原因后,隨即按以下步驟對VEC板件進行更換:
1)在RCP上將通道切換改為手動,設置通道B為主用,將通道A發射關閉。
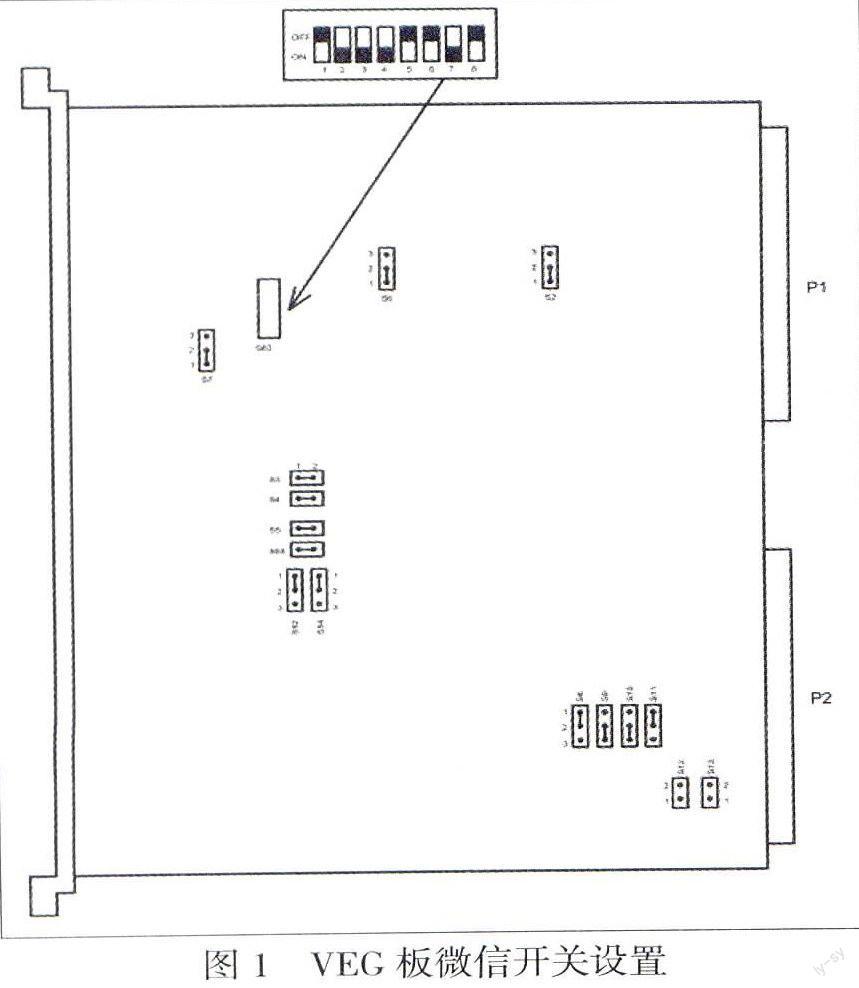
2)關閉機柜各組件電源,待指示燈滅后,移除VEC板上的連線,用扭矩扳手擰下J2 SMA連接頭,然后拔出RXl-TXI和RX2-TX2連接頭,擰松板件固定螺絲,取出原VEG板。在更換備件VEG板之前,有一點需要注意,即需要設定板件上的微型開關S63和跳線位置。圖1為微型開關S63的設置。
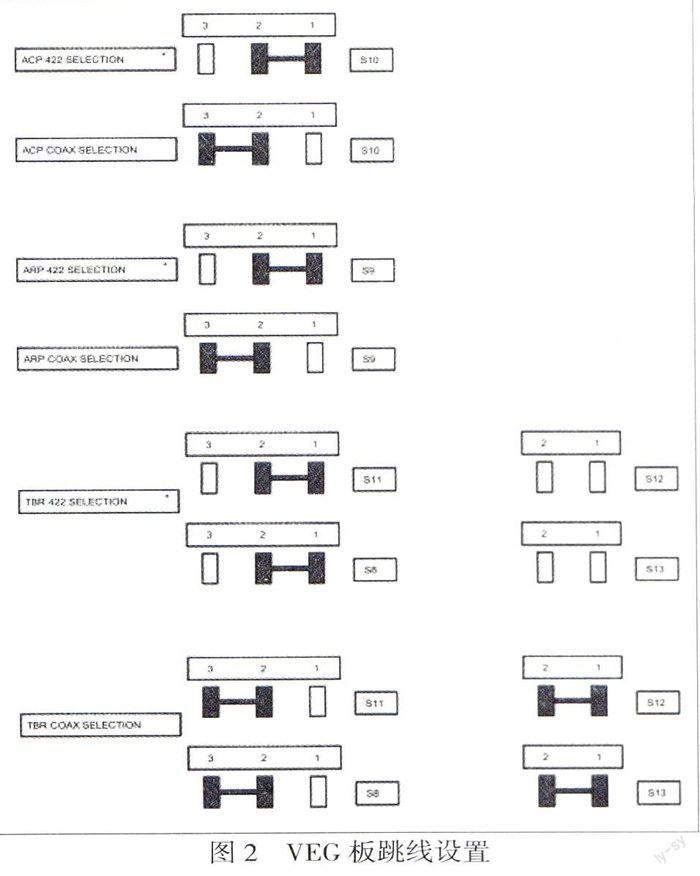
VEG板的ACP、ARP以及TBR的選擇則是通過跳線的設置,包括S8,S9,S10,SI1,S12和S13等,如圖2所示。其中RS422
接口只適用于單二次雷達(OFF-MOUNTED),由于吳忠為一二次合裝,故應為同軸電纜的跳線方式。
3)換上備件VEG板,連接好各連線。檢查連線無誤后,開啟機柜各組件電源。RCP上開啟發射。
進行到這一步后,觀察RCP,LCMS上告警均消失。在RCP上將主用通道切至通道A,運行狀態正常,觀察RMM目標融合正常,故障排除。由此可判定故障原因為VEG板件故障所引起的。
三、結束語
二次雷達設備模塊化、集成化程度越來越高,如何利用系統監控軟件以實現快速故障定位、及時排除故障,成為維護人員設備維護的一個重要手段。隨著航班流量日益增大,吳忠雷達站的正常運行保障對西部航路區域管制顯得愈發重要。SIR-S二次雷達投入運行的時間并不長且同型號設備較少,每一次故障的出現有可能就是一次新的探索,是一個積累經驗的過程。本文簡要的介紹了SIR-S二次雷達RPCM組件中VEG板件故障的定位和分析過程,希望對SIR-S二次雷達維護人員面對類似問題有所幫助。