太陽能鍋爐溫差循環節能控制系統程序設計
2015-05-30 10:48:04李子劍
中國新通信 2015年10期
李子劍
【摘要】本文選用電鍋爐輔助熱水系統,采用定溫上水與溫差循環的節能運行方式,利用PLC實現太陽能鍋爐熱水溫度控制系統的智能自動控制。
【關鍵詞】太陽能鍋爐 智能化 溫差循環 節能
一、方案設計思路
本設計采用的PLC是西門子S7-200的CPU226型號,采用了5個指示燈來顯示系統的運行狀態和報警顯示,分別是運行燈HL1,停止燈HL2,水位上限報警燈HL3,水位下限報警燈HL4和防凍報警燈HL5;并且用三個PT-1OO溫度傳感器用來檢測集熱器出口溫度T1、保溫桶溫度T2和鍋爐溫度T3。一個浮球液位傳感器來檢測保溫桶的水位。傳感器檢測信號為4-20mA的模擬信號,經過EM231模擬量輸入模塊處理后輸入PLC對系統進行控制。通過若干電磁閥、水泵和報警器對系統進行控制。
二、設計程序流程圖
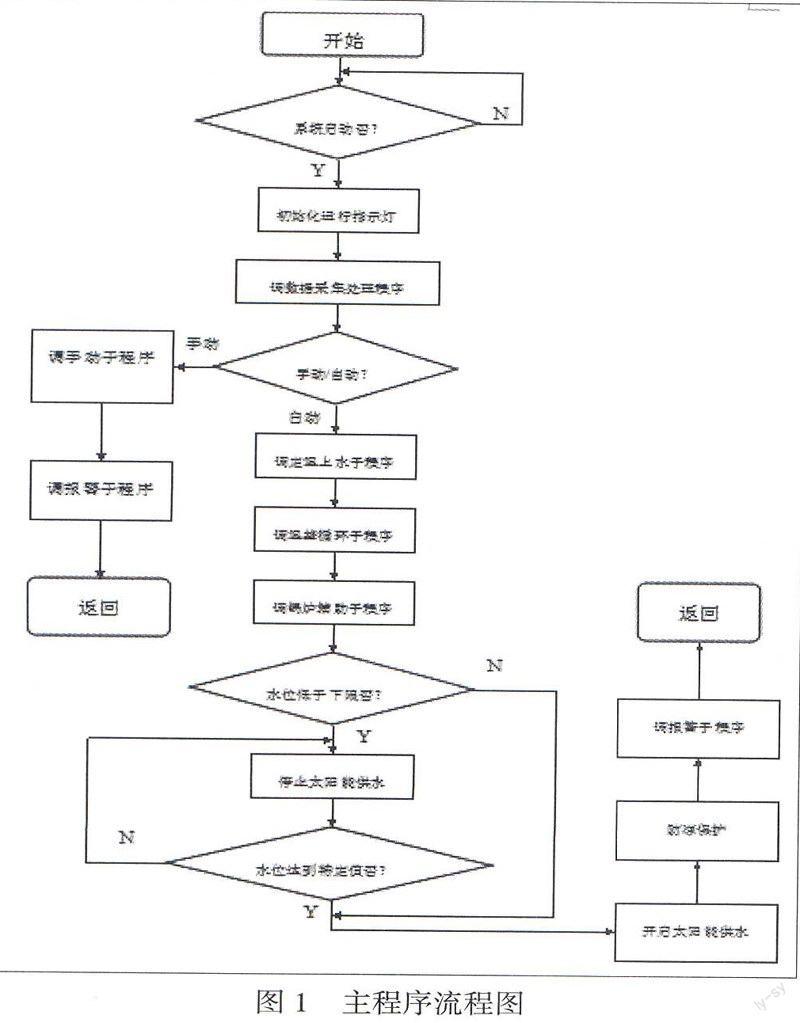
1)主程序流程圖。主程序流程圖如圖l所示。
2)系統程序執行的說明與解釋
主程序為系統程序的總體構架,當PLC為RUN狀態下時,程序開始,10.O和10.1分別控制系統的啟動與停止,而Q0.4和Q0-5分別對應系統的啟動指示燈與停止指示燈,啟動后調用數據采集處理子程序,對由EM231模塊采集到的信號進行處理運算,得出相應的溫度值與液位百分值,為程序控制做準備,10.2選擇系統的手/自動狀態,10.2接通則為手動狀態,則主程序自動調用手動子程序,系統進入手動狀態,當I0.2關斷時,則系統不調用手動子程序,自動進入自動狀態,執行自動狀態的下一程序環節,分別調用定溫上水子程序、溫差循環子程序、和鍋爐輔助子程序,執行完子程序的調用后,進入水位保護環節,保溫桶的水位值經過數據采集處理子程序的運算后存放在VW70中,當VW70中的值小于下限水位10%時,延時10秒后太陽能供熱水閥斷開,以之對應的Q1.2置0關斷,直到VW70中的值恢復到特定水位50%且溫度值在正常范圍時,太陽能系統恢復供水,Q1.2重新置l接通,最后進入防凍保護環節,VW20中存放著集熱器的溫度值,當VW20中的值小于防凍臨界值4℃時,延時5秒后,開啟防凍排水泵,與之對應的Q0.3接通,溫度上升后關閉,接著調用報警子程序后主程序結束返回。
10.3控制系統的集熱器上水閥Q0.O、10.7控制防凍排水泵Q0.3、10.4控制溫差循環閥QO.1和循環泵Q0.2、10.5控制鍋爐電加熱器Q1.1、I1.O控制太阻能供水閥Q1.2、I1.1控制鍋爐供水閥Q1.3。最后調用報警子程序后結束返回。
報警子程序分為保溫桶水位上限報警、水位下限報警和集熱器防凍報警。當VW70中的水位值高于.E限水位85%時,延時10秒后水位上線報警啟動;當VW70中的水位值低于下限水位警戒值15%時,延時10秒后水位下限報警啟動;當VW20中存放的集熱器溫度值小于防凍警戒值6℃時,延時10秒后防凍報警啟動。當報警啟動后,相應的報警燈和公用的報警器就啟動,反之則停止。
當VW20中存放的集熱器溫度值大于50℃時,延時10秒后上水電磁閥QO.O啟動,直到VW20的值小于40℃時,延時10秒后上水電磁閥QO.O關閉。不斷重復。
VW80中存放著集熱器與保溫桶的溫差值,當VW80中的溫差值大于8℃時,延時5秒后啟動溫差循環,QO.l和Q0.2置1開通;當VW80中的溫差值小于2℃時,延時10秒后溫差循環停止,QO.1和Q0.2置0關斷,結束返回。
數據采集處理程序負責把溫度傳感器送人EM231模擬量輸入模塊經過模數轉換后的數字量(6400-32000)進行處理運算,運算后得出集熱器出口水溫值T1、保溫桶水溫值、鍋爐水溫值、保溫桶水位值和溫差值,其中溫度值的單位為℃,水位的單位為%,具體轉換過程在梯形圖中按照主程序處理原則進行計算。
主程序的水位保護和防凍保護部分;定溫上水子程序、溫差循環子程序、鍋爐輔助子程序和報警子程序都是帶有定時器的延時程序,其中主程序的防凍保護部分和溫差循環子程序中的是5秒延時,當太陽能集熱器溫度低于防凍臨界值,也就是4℃的時候,防凍動作延時啟動,延時5秒后防凍排水泵才開啟,在延時時間段內如果溫度恢復,又高于防凍臨界值,則防凍動作取消,防凍排水泵不啟動,等待下一個動作信號的來臨再次延時,直到延時到達后溫度還不恢復防凍排水泵才啟動;溫差循環也是如此,當溫差達到8℃以上時,延時Ss后才啟動溫差循環,延時時段內溫差不再高于8C則取消溫差循環當溫差2℃以內時,延時5秒后溫差循環停止,延時時段內溫差又高于2℃以上,溫差循環則不停止;定溫上水子程序中,當溫度高于50℃時,延時1OS后啟動開啟上水電磁閥,向太陽能集熱器供冷水,在延時時段內溫度降低到50℃一下,延時停止,則上水電磁閥不啟動,其他各子程序也如此延時動作,防止個動作在動作值附近頻繁動作,提高系統穩定性。
本設計的程序設計還需要做出一些說明,在符號表窗口中將本設計程序所需要的各符號各自定義說明后,進入程序編寫窗口進行梯形圖的繪制。首先,使PLC在RUN狀態,則系統程序開始,STOP狀態則系統不開始,下一步為系統的啟動與停止,在系統初始化后進入數據采集處理程序,數據采集處理程序的具體方法已在前面做出詳細的介紹,下面介紹其編程方法。在符號表窗口中將本設計程序所需要的各符號各自定義說明后,進入程序編寫窗口進行梯形圖的繪制。進入數據采采集處理環節,由PT1OO溫度傳感器和浮球液位傳感器采集到的反應各單位溫度和保溫桶水位的(4-20mA)模擬量經過EM231模擬量輸入模塊處理后轉化為6400-32000的數字量,存放在AIWO、AIW2、AIW4和AIW6中,按照前面所介紹的方法和公式進行計算。首先運用整數減法指令SUB_I把(AIWO-6400)、(AIW2-6400)、(AIW4-6400)和(AIW6-6400)的計算結果分別存放在VWIO、VW30、VW50和VW72中,再運用整數除法指令DIV_I把VWIO÷256、VW30÷256、VW50÷256和VW72÷256的計算結果分別存放于VW20、VW40、VW60和VW70中,最后再運用整數減法指令SUBj把VW20-VW40的計算結果存放于VW80中,這樣,VW20、VW40、VW60、VW70、VW80中存放的數分別是集熱器溫度值T1、保溫桶溫度值T2、鍋爐溫度值T3、保溫桶水位百分值H和溫差值△T。
數據處理完成后,進入手自動選擇環節,接通手動開關后,調用手動子程序,進入手動操作系統,一系列相應的手動操作梯形圖繪制完成后返回。若手動開關關閉,則不調用手動子程序,自動進入自動操作系統,按照流程圖中的步驟和設定參數與動作條件調用各子程序和與各執行動作相應的梯形圖后,主程序結束返回。各個子程序也按各自的流程圖和動作條件與設定參數完成繪制后返回。編譯無錯誤后保存,就完成了程序梯形圖的繪制。在梯形圖的繪制過程中,嚴格按照西門子S7-200的編程手冊和相關書籍資料中所規定的繪制原則、規則、規定與方法進行,使編程錯誤盡量的少,認真仔細,盡量保證程序的正確性、合理性和完善性,方便我們的程序調試與修改,提高效率和正確率。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國科技博覽(2016年19期)2016-10-19 13:10:22
中國科技博覽(2016年19期)2016-10-19 12:51:06
中國科技博覽(2016年18期)2016-10-19 11:23:00
中國科技博覽(2016年18期)2016-10-19 07:47:05
科學與財富(2016年28期)2016-10-14 20:02:56