基于激光位移傳感器可控節約型水龍頭的研究
2015-05-30 21:47:29馮璐夢雷巖巖石珂珂
中國新通信 2015年10期
馮璐夢 雷巖巖 石珂珂
【摘要】提出了一種基于激光位移傳感技術的可控節約型水龍頭。介紹了激光位移傳感器三角位移測量法的原理,分別從水位高度信息的采集、光信號的轉換、電信號的處理三個方面分析,最后搭建了基于位移傳感器的可控型水龍頭體系結構。
【關鍵詞】激光三角法 可控型水龍頭 光電轉換
微電子技術和傳感器已經成為二十一世紀信息社會的重要標志。隨著激光傳感器的廣泛應用及新型光電掃描與光電探測技術的不斷提高,工業、農業、家庭、軍事、醫學等應用領域的傳統方法得到了改善。激光傳感可控型水龍頭將激光位移傳感器與電子信號處理技術結合,應用在了水資源節約領域。市場上的傳統插卡式熱水龍頭在使用時難以估定水瓶內的水位,存在著極大的安全隱患和水資源浪費問題。該項日利用激光位移傳感技術檢測并定位水的高度,經過數字信號處理器將信號反饋到電子電路,自動切斷電源。和傳統插卡式熱水龍頭相比,基于激光位移傳感器的可控節約型水龍頭具有測量精度高、可靠性好、非接觸、自動化、安全等突出優點,有極重要的現實和環保意義。在前期的推廣中,這項技術先應用于學校水房保溫瓶水位的測試。隨著后期技術的成熟和市場的開發,可推廣向工廠水箱水位測定等更廣的領域,發揮更大的經濟和應用價值。
一、激光位移傳感器的研究現狀
現今光電技術的發展、微機的控制、數據的處理及PSD、CCD、四象限位移探測器的改善,使傳統的三角測量法有了廣泛的應用。具體包括質量的檢測、設備的維護、機械和生產自動化、流程和設備的監控等各個領域。
目前在國內,激光位移傳感的主要應用包括:對靈敏度和精確度的分析,如何提高其使用范圍以及位移、角度、同軸度的非接觸測量和校準領域。不過,我國對激光位移傳感器的研究仍處于實驗階段。國外很多專家對其做了大量的研究并取得成果。西班牙的研究者在三角激光位移傳感器的系統中,發現周圍的雜光對測量的精度有影響,并給出了相應的消除方法。目前,國內外有很多這樣的產品,廣泛地應用在軍事技術、航空航天、檢測技術等諸多領域。美國研制出紅外測溫傳感器,使其在惡劣的環境下仍能測量出飛行器各部分的溫度;城市的交通管理也運用紅外光電傳感器進行路段事故檢測和故障排除的指揮。總體來說,國外傳感器的測量范圍大,線性度好,分辨率高,穩定性好。國內對激光位移傳感器的研究雖不及一些歐美國家,但是卻在研究的種類上屢創新奇。
二、激光三角測量技術的原理
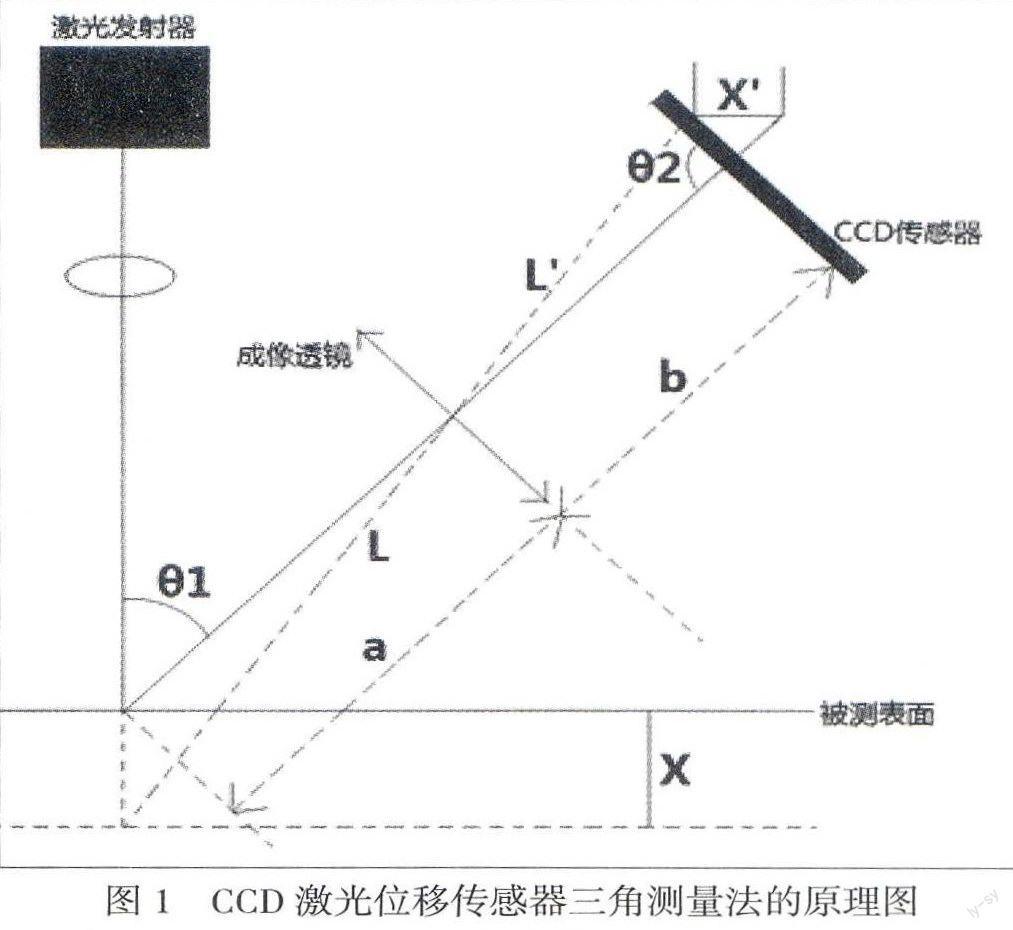
激光三角測量法是指從光源發射一束光線到被測物體表面,在另一方向通過成像觀察反射光點的位置,成像位移和實際位移存在一定的換算關系,通過這個關系式可以計算出被測物體表面的實際位移。由于入射光和反射光構成一個三角形光路,因此被稱為三角測量法。按照入射光線與被測物表面法線的關系,可分為直射式和斜射式。本項研究采用的是直射式激光三角測量法。
如圖l所示,激光發射器發射出一束光線到熱水瓶水面形成光斑,光線在表面發生反射后,從另一個方向通過成像透鏡,光斑成像在CCD位置傳感器上。隨著熱水瓶水面高度的變化,反射光的角度在發生變化,光斑成像也隨之發生位移。設光斑在CCD成像面上相對位移為X,被測表面(即水面高度)的實際位移為X,則兩者關系如下式:
在傳感器的選擇上,本項研究選用的是CCD激光位移傳感器。目前應用于激光三角法測距的光接收元件包括:CCD(Charge-c.oupled Device,光電耦合器件)和PSD(Position Sensitive Detector,位置敏感元件)。PSD是基于橫向光電效應來實現光能、位置的轉換,CCD是一種新型光電轉化元件,主要由光敏單元、信號輸入單元和信號輸出單元組成。CCD以電荷作為信號,實現電荷的存儲、轉移和檢測。與PSD相比,CCD具有輕便、體積小、耗能小、精度高、穩定性好、時效性高等特點。基于上述考慮,最終選定了CCD激光位移傳感器。
三、基于激光位移傳感器的可控型水龍頭系統結構
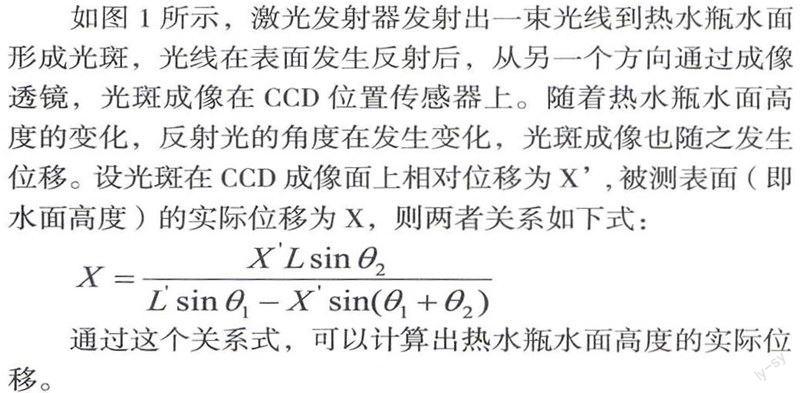
本項目研究的激光位移傳感器硬件系統包括:激光電源、半導體激光器、線陣CCD驅動電路、輸出信號的處理系統、單片機測量系統和水龍頭閥門控制系統。如圖2所示為激光位移傳感器的可控型水龍頭系統的總框圖。
3.1 光源的選擇
激光器有很多種:氣體激光器、固體激光器、半導體激光器等,氣體激光器單色性和方向性好,但體積和重量大,需要外部高壓電源,不易安裝在小型光學測頭上。半導體激光器具有超小型、高效率、電壓低、電能轉換率高、便于安裝等優點。激光光束在傳播中存在散射,當測量目標越遠,光能量分布不均勻,從而導致誤差出現,半導體激光位移傳感器可以進行體積小的短距離測量。
3.2 線陣CCD驅動電路
目前,應用于激光三角測距系統的光接受元件主要有兩種:CCD——光電耦合器件和PSD——位置敏感元件。本測距系統設計中采用精度高、穩定性好的光電耦合器件CCD作為光電探測器,根據被測物體的移動距離,間接進行測量。
3.3 輸出信號的處理系統
圖像采集后,CCD輸出的信號疊加了較大的干擾噪聲,所以要先經過預處理電路后在進行二值化處理。預處理即是將CCD輸出進行前置放大后進行濾波處理,放大電路將微弱的信號放大同時干擾的噪聲信號也得到了放大。
所以經過低通濾波器將放大電路處理后信號中的高頻成分濾除,常用低通濾波器包括:三角濾波法、高斯低通濾波器、中值濾波器等不。最后將輸出的信號送入電壓比較器進行二值化處理得到穩定的數字信號。最后將數字信號送到單片機系統進行脈沖計數就能得到像點位置信息。系統將計算后的結果顯示在顯示器界面上。
3.4 水龍頭閥門控制系統
在理想條件下,熱水瓶的高度為H,由上述系統測出水面高度為X,當x的值接近L時,系統通過反饋電路來控制水龍頭的閥門。
四、結束語
激光三角法采用非接觸測量,以其實時性強、精度高、對被測物體表面沒有特殊要求等優點得以廣泛應用,本論文利用直射式激光三角法,對系統的結構參數和所選器件做出了合理的設計和選擇。論文的主要工作包括以下幾個方面:
(1)通過對激光測距系統在國內外的發展現狀研究,并結合本系統情況,確定了本系統的測量原理。
(2)數據采集:令熱水瓶的高度是定值H,從光源發射一束激光到被測物體(上升水面)表面,在另一方向通過成像觀察反射光點的位置。通過線陣CCD對光電信號進行采集,從而計算出水面到瓶口的距離X。
(3)信號處理將采集到的數據經過濾波放大電路處理,然后將輸出的結果由模擬信號轉化為數字信號,最后將信號送人單片機系統。
(4)數據結果輸出:通過單片機的計算被測物體的位移量,當X-H趨近于零時,將其距離顯示在顯示器界面上,通過電路控制水龍頭閥門的關閉。
后期工作展望:
(1)完善三角法測量原理的理論分析,減少由于測量產生的誤差。
(2)改進數據采集和信號處理的電路,推廣此技術的應用范圍,使其可以應用于未知高度的熱水瓶。