模塊化智能輪椅開發
2015-06-02 02:33:28祖涵明
科技創新導報 2015年8期
關鍵詞:單片機
祖涵明


摘 要:該文介紹模塊化智能輪椅設計、開發的全過程。通過對智能輪椅機械部分和電氣部分的設計、控制軟件編程,使智能輪椅完成用不同模塊進行手動和自動控制的功能。
關鍵詞:單片機 智能輪椅 模塊化控制 殘疾人康復設施
中圖分類號:TP311.52 文獻標識碼:A 文章編號:1674-098X(2015)03(b)-0051-04
進入21世紀,我國老齡化愈加嚴重。截止2010年第六次全國人口普查,我國60歲以上人數已經超過2億人,占全國總人數的13.26%,預計到2020年,老年人比例將達到17%。計劃生育政策的落實使得很多家庭只有一個孩子,未來可能會出現一個年輕人贍養許多老人的情況,這對經濟發展和個人發展都很不利。尤其是在當前的經濟壓力下,年輕人大都離開家鄉,去大城市工作,老人無人照顧,生活不便。針對兒女在外工作的空巢老人,模塊化智能輪椅的目標之一就是通過傳感和智能控制,更加安全地解決老年人出行問題。
另外我國殘疾人的數量非常龐大。根據2007年發布的《中國第二次全國殘疾人抽樣調查數據公報》和2011年《第六次全國人口普查公報》;截止2010年末,我國有各類殘疾人8502萬人,占全國人口的6.34%,有殘疾人的家庭達到7050戶,占全國家庭總數的17.80%。其中各類殘疾人的人數分別為:視力殘疾1263萬人;聽力殘疾2054萬人;言語殘疾130萬人;肢體殘疾2472萬人;智力殘疾568萬人;精神殘疾629萬人;多重殘疾1386萬人。各殘疾等級人數分別為:重度殘疾2518萬人;中度和輕度殘疾人5984萬人。
殘疾人的出行和獨立生活能力成為這些家庭的負擔。很多時候會占用這些家庭的勞動力專門照顧殘疾人,造成極大的不便,對看護者也會產生身體上的不良影響;現有的電動輪椅又不能滿足手臂殘疾的朋友控制,和智力、視覺不佳的朋友安全出行的需求。根據病人的單獨情況定制的輪椅價格不菲,不具有推廣的可能。針對商品化智能輪椅的空白,特意研發模塊化智能輪椅;通過用一種電動輪椅底盤配備不同可拆卸控制和智能自動模塊的方式,讓智能輪椅具有普適性,降低殘疾朋友的經濟負擔,提升他們的自主生活能力。
1 市場現狀
現在市場上能直接買到的大多是電動輪椅。這些電動輪椅結構簡單,均采用右手控制桿控制前后左右,有些在右手有調速器,可以改變速度。這些輪椅價格從4000元至幾萬元不等,續航能力15~30 km,可以滿足大部分健全老年人短距離出行的需求。但是對于殘疾人和視力、聽覺有障礙的老年人來說,這樣的輪椅就不能滿足需求了。甚至左利手的朋友想要使用電動輪椅都需要向廠家定做;既浪費時間精力,又不能很好地滿足需求。可見模塊化輪椅的市場空白和需求之大。
對于無法正常使用雙手的殘疾人,國內外都有一些采用其它肢體控制的輪椅樣機;但是因為需求量小,成本高等原因難以量產,無法切實滿足殘疾朋友的需求。這些樣機中不乏可以借鑒并改裝成模塊化的例子,比如可以學習路徑的vision輪椅,用眼鏡控制的輪椅等。這些輪椅加以合并改造,就會有很大市場空間。
每個殘疾人都有自己不同的需求,然而大多數電動輪椅無法支持特殊的操控方法和智能技術。比如手臂癱瘓殘疾的朋友需要用腳、下頜或頭部操縱輪椅;還需要機械臂幫他們拿東西,端水。腿部、高位癱瘓的朋友需要頭部、下頜操縱輪椅,還需要升降和輔助上床裝置。視力、聽力障礙的患者需要自動避障、自動導航輪椅。這些需求都不是單個電動輪椅所能滿足的,所以需要模塊化的結構幫助他們使用身體允許的方法操作輪椅。
如何將雙腿不能正常行進的殘疾人和康復中的病人移上病床是一個國內外都沒有深入研究的問題。現在不論是使用普通輪椅還是電動的朋友都需要護工或家人將病人抱上病床或輪椅。雖然有些電動輪椅可以升降,但是沒有切實改善這個問題。如此搬運可能會對病人和殘疾人造成二次損傷。護工和家人長期照料會損傷脊柱,也會對殘疾人造成心理障礙。可以考慮使用鏟式擔架(圖1)的設計,讓輪椅座位滑動到床上,從中間分開,方便上下。可是這樣設計結構復雜,成本太高。市場上尚沒有一款輪椅可以將椅面直接側滑到病床上,方便護理。
2 輪椅設計過程
2.1 底盤選擇
本模塊化智能輪椅的底盤采用符合國家和國際標準中關于電動輪椅車標準的前驅電動輪椅底盤。前驅電動輪椅(如圖2)相比后驅輪椅有轉彎半徑小,越野能力強的優勢;可以在草坪、石子路、土路等各種路面上行駛,并可以爬陡坡;具有很強的路面適應力和穩定性。后驅底盤(如圖4)雖然速度和操控性比前驅底盤好,但是轉彎半徑較大,不適合在家庭室內使用。前方的萬向輪在不平路面會受到較大阻力,不能開過減速帶和草地。中間輪驅動(如圖3),前后萬向輪輔助的輪椅轉彎半徑最小,但是比較容易被障礙物卡住,使得主動輪懸空,還需要前后懸掛,所以沒有采用。采用前驅底盤可以方便使用者去公園等場所休閑和在鄉村道路上使用。最后選擇的輪椅底盤草圖如圖5所示。
輪椅馬達上有離合器,閉合離合器馬達驅動車輪,打開離合器車輪脫離馬達。方便輪椅沒電后有護理者推行。
2.2 底盤結構
底盤上安裝24 V鋰電池、驅動電機、腳踏板、側面腳踏板和單片機,提供動力和處理信號。
鋰電池相比很多電動輪椅使用的鉛酸蓄電池有能量密度高、質量輕、更安全的優點;但是價格更高。價格高的問題可以被鋰電池壽命長的優點補償。鋰電池的壽命更長,鐵鋰電池充電循環可以達到2000次,而鉛酸電池只有500次。鉛酸電池在冬季容量會下降40%以上,鋰電池的具有良好的溫度適用性,即使在-20℃的冬季,其容量下降不超過15%。鋰電池充電時間短,方便輪椅使用者長距離出行;鉛酸電池的充電時間一般為6~8h以上,鋰電池使用專用充電器,充電時間只需2-3h。重要的成本問題,實際上鋰電池成本不比鉛酸電池成本貴很多,在小型儲能電池使用情況下,鋰電池比鉛酸電池更具競爭力。目前鋰電池昂貴的原因是因為其技術還在不斷進步,舊的生產工藝淘汰迅速,廠家為在短時間收回成本,必定有比其它行業更高的利潤率,當技術發展成熟,產業規模形成,鋰電池的價格一定會比鉛酸電池還便宜。
輪椅采用兩個200 W直流電機分別驅動左右前輪,設計最大時速9 km/h,設計最大航程20~30 km(可選擇電池容量)。
電池的上方安放著座椅底盤。座椅采用可升降、可滑動設計(如圖6),方便和病床對接并搬運病人。座椅經側滑裝置、升降裝置固定在座椅底盤上。升降采用千斤頂螺桿與氣撐桿相結合的方式,減少升降電機的功耗,增強升降座位的穩定性。升降范圍可以滿足普通床鋪的高度相等,最大提升25cm。升降系統由電機驅動,輪椅把手上的按鈕控制。椅子底座和固定的椅子靠背由嵌入椅背兩側滑軌連接,安裝有不同模塊的右側扶手隨椅子一起升降,可拆卸的左扶手固定在靠背上。滑動裝置主要機構是安裝在座椅下方和升降結構之間的兩條承重滑軌。滑軌分三段設計:第一段固定在升降機上,不能滑動;第二段連接第一段,可以滑出一半;第三段連接第二段,可以完全滑出輪椅。每條承重滑軌都有兩排滾珠與相鄰滑軌連接,滑出后設計最大承重45kg,保證安全。左扶手在放下時起到對滑動座椅的限位功能,由護工或家人抬起后座位方可滑動。輪椅底盤上右側面裝有可折疊腳踏板,不用時向上折疊收起;需要使用滑動座位時放下。護工可以站在側面腳踏板上,保持輪椅平衡;將座椅調節到和床一樣高后,向左推座椅,將病人挪到床上,然后將輪椅推走。
2.3 模塊化控制器
針對不同殘疾人和老年人四肢活動水平不同,本智能輪椅采用模塊化控制器滿足不同需求。所有控制模塊在沒有信號輸入時馬達處于剎車狀態,保證使用者安全。
開發時總控制器使用Arduino Mega 2560單片機(圖8)。Arduino Mega2560 上至多有54個數字信號輸入端口,至多15個輸出端口和16個模擬信號輸入端口,256KB內存;配合馬達控制電路可以滿足模塊化智能輪椅的信號處理需求[14]。
對于手臂殘疾的人,可以安裝下頜或頭部控制器,方便操控輪椅。
下頜控制器(如圖9)的支架安在輪椅右扶手的護板接口上,可調節支架將微動控制搖桿伸到病人的下巴下面。微動控制器的頂端是一個球形橡膠部件,病人的下頜可以頂在上面操縱輪椅。通過廣東省工傷醫院下頜控制輪椅樣機的使用反饋,球形控制頭比碗型控制頭操縱更舒適、簡便,故采用[7]。病人只需移動頭部就可控制輪椅移動。控制搖桿的輸入信號采用曲線設計(如圖10),在小幅度移動時速度小于移動量的正比速度,方便在室內低速精確控制;在輸入信號增大時速度迅速提高,方便戶外出行。
頭部控制器(如圖11)可以固定在輪椅靠背的頭枕處。凹形頭枕后方、左側和右側分別安裝自動復位長行程壓力/位移傳感器,病人向后仰頭輪椅前進,低頭輪椅停止,向兩側靠分別向左右轉彎。使用時用座椅升降機調節座椅到合適的位置,適應不同身高。頭部和下頜控制器可以幫助不方便使用手的殘疾人控制輪椅。
腳部控制模塊針對特殊病人設計。(如圖12)腳部控制器可以安裝在輪椅腳踏板上,配合座椅升降機,調節高度適應不同人的身高。腳部控制器和原來的手部控制桿類似,都是電位器搖桿控制前后左右。控制器固定鞋套長30cm,寬10cm,病人的鞋可以固定在控制器的鞋套中,防止滑脫。腳部控制器腳掌部位和腳跟部位都有按鈕,只有用整個腳掌同時踩下兩個按鈕控制器才可以控制輪椅,防止上下輪椅時發生誤操作。
手柄控制器讓護理者輕松地控制電動輪椅。有些病人可能有家人照料,但是因為一些原因家人也不便長時間推輪椅。該智能輪椅特意在手柄處安裝了方向、速度控制器(如圖13),讓護理者毫不費力地控制輪椅前進,方便長途推行。手柄控制器安裝在右手柄上,分上下兩部分。上電位器滑塊可以左右移動,自動回位,由護理者右手拇指控制左右。下電位器安裝在手柄下方,由食指和中指向上前后按壓,自動回位,控制前后速度。
2.4 輪椅智能控制
除了不同方式的手動控制,該模塊化智能輪椅還可以加入智能自動模塊,保障視力受限和智力受限的使用者安全出行。智能控制模塊包括可選擇安裝的紅外避障模塊、紅外路面掃描模塊和輪椅控制單片機攜帶的GPS定位模塊。
紅外避障模塊(如圖14)安裝在桌板下方和后輪支架上,由四個前視紅外傳感器和兩個后視紅外傳感器組成,可以掃描前方左右各45度內和后方兩側的障礙物情況;在障礙物接近時語音提示“障礙,轉彎”,過度接近時自動減速。因為輪椅是前驅,轉彎時擺尾幅度較大,使用者不方便一邊觀察前方,一邊觀察后方。后部紅外傳感器提供側視,安裝在后輪支架的最遠端,在即將碰撞時自動減速,并語音提示“后方障礙,減速”。
紅外路面掃描模塊(如圖15)安裝在腳踏板下方,由四個下視紅外傳感器構成。四個紅外傳感器與水平成-30度橫向排列,不斷測距。如果距離變長,說明前方下陷;如果距離不斷變化,說明路面不平。檢測到路面變化后,輪椅進行語音提示“路面不平”,提醒使用者注意;在探測到大幅度下陷時自動減速,并語音提示“路面,減速”。建議使用頭部控制器的顧客使用這個模塊,因為使用者可能很多時候是在仰頭操作,難以觀察路面情況。
GPS模塊可以和智能手機通過藍牙連接,在用戶需要去遠方時提供導航。用戶在手機上規劃好路徑后可以計算總里程數,與智能輪椅無線連接后輪椅計算電池電量,預計無法到達時在手機上彈出警告。現有的電動輪椅只有電量指示,用戶并不知道電池是否夠用,只能憑經驗判斷,增加了不安全性。本智能輪椅在路徑規劃時就可以提醒用戶電量不夠,方便規劃行程。
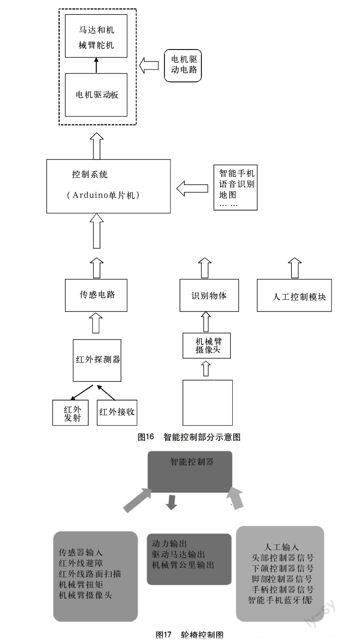
2.5 輪椅控制圖
見圖17。
3 模塊化輔助設備(規劃中)
因為電動輪椅使用者行動不便,在坐姿上胳膊活動范圍有限,所以無法順利完成日常生活中許多動作,比如開門、倒水、拿東西等。還有些手臂殘疾患者根本無法移動胳膊。針對輪椅使用者開門難、拿取物品難、喝水難等問題,該智能輪椅在底盤右扶手處預留了安裝機械臂的位置,為未來升級安裝機械臂留出空間。機械臂初步規劃有7個自由度,長1 m左右;具有夾取、伸縮、旋轉的能力。機械臂每個馬達都裝有扭矩傳感器,在受力過大時自動停止當前動作,防止打到東西或者捏碎物品。機械手上方有攝像頭傳感器,可以按照程序識別日常生活中的物品,如杯子、門把手、開關等。當使用者需要抓取物品時,可以直接向智能手機說明物品名稱,智能手機將信號通過藍牙傳給控制器,控制機械臂自動識別物品,待用戶語音確認后抓取到輪椅桌板上。如果使用者發出喝水指令,機械臂還可以把水杯遞到使用者胸前,病人就可以通過吸管飲用。
4 智能輪椅與智能家居構想
隨著各種智能設備的普及,智能家居也即將成為現實。到那時,所有家庭設備,例如電視機、燈、空調都可以使用智能手機控制。智能輪椅也會成為一部分,幫助老年人和有需要的人更方便地生活。模塊化智能輪椅將會分階段,根據更新的需求開發相應的模塊,成為家居物聯網的一部分,方便更多人的生活。
5 結語
隨著國家經濟、生活水平的提高,老年人和殘疾人等社會特殊群體越來越多地受到人們的關注和幫助。模塊化智能輪椅可以根據個人需求定制、購買模塊,更加人性化地方便他們出行,切實提高了老年、殘疾人的生活質量,有助于他們融入社會。我們相信隨著科技進步,模塊化智能輪椅會進入他們的身邊,陪伴他們更好的生活
參考文獻
[1] GB/T 12996-2012,電動輪椅車[S].2012.
[2] GB/T 13800-2009,手動輪椅車[S].2009.
[3] 周偉,謝存禧.基于單片機的多功能智能輪椅的模塊化設計[J].機械設計與制造,2010,(3):18-20.
[4] 王麗軍.智能輪椅導航系統的仿真與實驗[J].微型電腦應用,2010(12):40-43,2.
[5] 全國老齡辦.中國人口老齡化發展趨勢預測研究報告[R].2006-2-23.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
