考慮大貨車橫向穩定性的平曲線設計控制指標
2015-06-05 09:06:13華貴龍
重慶交通大學學報(自然科學版) 2015年3期
張 馳,華貴龍,張 敏
(1.長安大學 特殊地區公路工程教育部重點實驗室,陜西 西安 710064;2.長安大學 公路學院交通工程研究所,陜西 西安 710064)
?
考慮大貨車橫向穩定性的平曲線設計控制指標
張 馳1,華貴龍1,張 敏2
(1.長安大學 特殊地區公路工程教育部重點實驗室,陜西 西安 710064;2.長安大學 公路學院交通工程研究所,陜西 西安 710064)
為研究駕駛員行為和道路線形指標對大貨車橫向穩定性的影響,選擇六軸半掛車為典型車型,采用Trucksim動力學仿真軟件建立車輛動力學閉環仿真模型,以側向加速度作為大貨車橫向失穩風險評價指標。基于統計學的理論,運用MATLAB回歸建立大貨車側向加速度預測模型,得到了不同設計速度條件下典型車型的極限最小轉向半徑值。研究結果表明:采用多自由度大貨車模型,考慮橫向滑移條件計算得到的平曲線極限最小半徑比我國標準所規定的平曲線極限最小半徑在各級設計速度條件下均大10%左右。研究成果量化了駕駛員行為和道路線形指標對大貨車橫向穩定性的影響,并對平曲線設計控制提出了建議指標,對今后道路安全設計具有參考價值。
道路工程;平曲線設計;Trucksim仿真;貨車穩定性
0 引 言
近年來,隨著物流運輸的快速發展,貨運車輛逐年遞增,特別是西部山區貨運增長速度迅猛,但是由于早期山區道路修建指標較低,時常引發貨車側翻和側滑的交通事故。早期將貨車簡化成為剛體進行轉彎穩定性的研究思路是造成設計指標不滿足日益增長的交通發展需求的原因,隨著技術手段的發展,已經有較成熟的技術進行多自由度車輛行駛行為分析,因此為了保障貨運交通安全,明確各級設計速度條件下貨車轉彎行為所適應的安全半徑,需要利用先進仿真手段對平曲線的設計控制指標進行深入研究。
有關大貨車行駛穩定性與道路平曲線設計控制的研究一直是汽車工程和交通工程領域的熱點,國內外學者對其進行了大量的研究,也得出了豐富可觀的成果。S.Takano,等[1]使用計算機建立了一種三自由度車輛動力學模型對車輛進行各種工況下的仿真分析,并對大貨車側翻穩定性進行了研究;S.Frimponq,等[2]建立了礦用自卸汽車的RASC模型,對其轉向時的控制性和穩定性進行了仿真分析研究;E.Dahlberg,等[3]運用一種計算動態側翻閾值的方法,提出了動態分析對于貨車側翻穩定性的重要作用;G.Furtado[4]及S.M.Easa,等[5-6]通過車輛動力學仿真模擬軟件VDMroad研究車輛在平曲線、平縱組合線形下安全行駛所需的最小曲線半徑等問題,并與現有道路設計規范作比較;丁慶國[7]利用CarSim軟件建立了平縱組合路段車輛側翻仿真模型,得出了車輛不發生側翻時平縱組合線形指標的關系;白鋼[8]利用CarSim軟件仿真分析了無縱坡路段平曲線半徑限值、無縱坡路段平曲線超高限值以及縱坡路段車輛行駛穩定性;許金良,等[9]采用風洞試驗的方法,考慮橫風對小客車和集裝箱車的作用,提出了道路線形設計新指標;羅京,等[10]通過分析懸掛系統對車輛行駛橫向穩定性的影響以及大型車橫向傾覆特點,推導出考慮車輛懸架結構后的公路平曲線設計指標及公式。
現有路線設計多以傳統靜力學理論為基礎,將車輛簡化為剛體,忽略了車輛側傾運動、輪胎變形以及駕駛員行為的影響,并且通常研究的車型是小汽車。同時國內外也鮮有綜合考慮道路、車輛以及駕駛員行為對道路平曲線設計控制的影響。為此,筆者通過TruckSim仿真軟件動態的仿真分析道路、車輛以及駕駛員行為對新型大貨車橫向穩定性的影響,建立大貨車側向加速度模型,再分別對貨車橫向傾覆和橫向滑移條件進行分析,提出平曲線設計建議指標,以期對道路平曲線設計有更好的控制。
1 仿真系統模型
TruckSim是由美國Mechanical Simulation Corporation公司開發的一種動態模擬汽車整車動力學的仿真軟件,采用面向特性的參數化建模手段,用于仿真及分析輕型貨車、大客車、重型半掛車、重型卡車以及多軸軍用汽車對駕駛員操縱(轉向、制動、加速)、車輛本身、3D路面和空氣動力學輸入的響應,主要用來預測和仿真汽車整車的操縱穩定性、制動性、平順性、動力性和經濟性,主要由Database、Animator和Plotter三個部分組成。
A.A.Kordani,等[11]利用TruckSim對行駛在設有減速丘的路面上的貨車進行動力學仿真,得到減速丘尺寸與貨車動力學響應的關系,并與實車數據進行對比,結果表明仿真的精確度很高,具有很強的實時性。H.Rakha,等[12]采用TruckSim仿真分析了車輛對車輛本身、3D路面輸入的響應,為HCM中有關爬坡車道的設計提供了參考。段斌,等[13]利用TruckSim工程軟件進行了半掛汽車列車外擺值仿真,同時還進行了實車試驗。研究結果表明:該算法計算結果準確、公式簡潔、便于理解和工程實用,可為半掛汽車列車的通過性研究提供指導。因此,筆者采用TruckSim軟件仿真分析大貨車轉向動力學。
1.1 道路模型
道路幾何線形主要包括平曲線、縱坡、超高。如圖1,R為平曲線半徑、i為縱坡、ih為超高。在TruckSim中道路模型主要由道路平面線形文件、道路縱斷面線形文件和道路橫斷面文件組成。圖中,由于道路的縱坡和超高一般均很小,因此,可取α≈ih,G≈i。
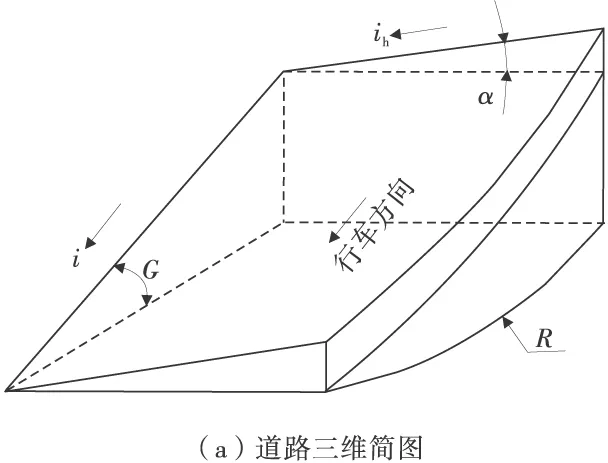
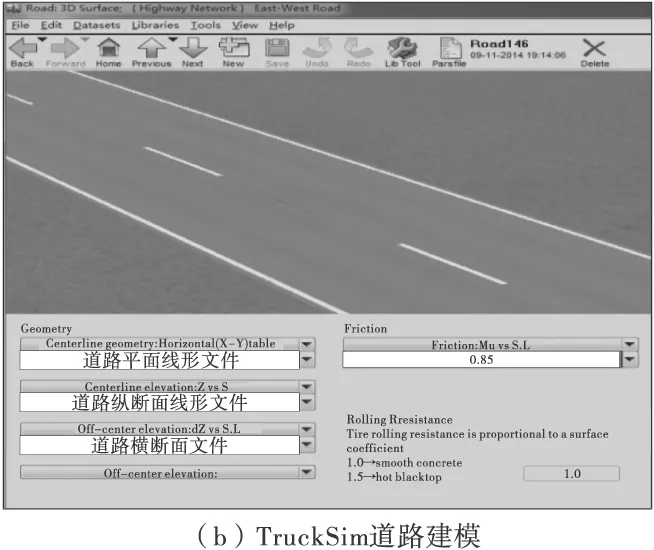
圖1 道路模型
道路設計指標直接影響著車輛行駛的安全性,因此本試驗中所采用的道路設計指標均符合JTG B01—2003《公路工程技術標準》(以下簡稱《標準》)中的相關規定,同時本試驗路面附著系數暫定為0.85。
1.2 車輛模型
近年來,我國公路運輸高速發展,直線型的單體卡車已經不能滿足貨車重型化和高速化的要求,由此引發重型半掛車的產生,目前我國高速公路上出現大量的重型半掛車,根據2011年《中國高速公路運輸量統計調查分析報告》[14],六軸半掛車貨運周轉量比重已達到58.22%,已成為我國高速公路貨運的主力軍。因此,筆者選用配置國產一汽錫柴8.6LCA6 DL2-35E3發動機的解放CA4250P66K2T1E型牽引車和華駿ZCZ9402HJD半掛車作為研究車型,該車為六軸半掛車,滿載總重量49 t,額定載重量為34.5 t,試驗在車輛滿載情況下進行。
1.2.1 懸架模型
半掛汽車列車懸架系統以鋼板彈簧為主,鋼板彈簧力的產生較復雜,同時存在干摩擦,每次運動都會消耗部分能量,即在相同的撓度下,加載時彈簧力大于卸載時的彈簧力。模型近似采用線性的加載和卸載力曲線進行描述,牽引車前軸、后兩聯軸和半掛車后三聯軸板簧的剛度分別為250,700,2 500 N/mm;每軸板簧在相同撓度下加載與卸載彈簧力之差近似相等,分別為4 000,10 000,10 000 N。減震器對車架與車身振動起到衰減作用,三軸的阻尼系數分別為15,30,30 N·s/mm。
1.2.2 轉向系統模型
轉向系統建模過程中分為兩部分:第1部分是從方向盤轉角到轉向器,近似用線性關系表示,定義為名義角傳動比nw;第2部分是從轉向器到轉向輪,這之間通過轉向機構的非線性傳遞,梯形臂和橫拉桿等的非線性傳遞使得傳遞到左右輪的傳動比不同。設從轉向器到左、右車輪的傳動比分別定義為ng1和ng2,則轉向系統的總角傳動比為:ni=nw·ngi。
1.2.3 輪胎模型
輪胎模型是整車建模的關鍵部分,對仿真精度影響很大。筆者選用輪胎規格為11.00R20的輪胎,所建立的輪胎模型能夠準確計算輪胎垂直力、剪切力以及各種力矩。輪胎的最大載荷為1 000 000 N,其主要的測試變量包括有效滾動半徑、輪胎剛度、滾動阻力、側向力、回正力矩、輪胎轉動慣量等。
2 仿真過程及行駛動力學分析
2.1 大貨車橫向失穩及風險度量指標
側翻是指任何一種能夠導致車輛繞其縱軸旋轉90°甚至超過90°后車體直接與地面接觸的操縱。造成側翻的原因可以是一種或者是很多因素相結合,這些因素包括汽車結構、駕駛員操作、道路條件以及環境因素等。貨車側翻一般可分為兩大類,一類是由于貨車轉向運行引起的側翻,另一類則是絆倒側翻。前者發生的主要原因是由于車輛在道路上行駛時,汽車的側向加速度超過側翻閾值,使得汽車的內側車輪垂直反力為0,因而引起側翻;后者是指汽車運行時產生側向滑移,與路面周圍的障礙物側向撞擊而將其絆倒的側翻[15-16]。筆者所研究的側翻指的是前者。
側滑是指車輛在轉向運動時,駕駛員在方向盤上施加轉角以后,車輛作曲線運動產生離心力,進而使前輪產生側偏力,彈性輪胎受側向力作用滾動時就產生了側偏角,再進一步引起車輛產生橫擺運動;車輛的橫擺運動又導致后輪也產生側偏力,進而產生側偏角。正是由于前、后輪產生的側向力提供了車輛轉向的向心力。車輛在小半徑路段下以較高車速行駛時,輪胎產生的側向力與側偏角之間為非線性關系。并且車輛發生失穩大多是在輪胎的非線性區,即隨著側偏角的增加輪胎產生的側向力逐漸飽和。當前軸發生飽和時前軸就容易發生側滑,使車輛偏離駕駛員的預期軌跡;當后軸發生飽和而側滑時容易產生甩尾等更加危險工況。
目前,國內外針對重型車輛橫向穩定性的評價指標主要有側傾角、側向加速度和橫向載荷轉移比3種[17-19]。由于貨車橫向失穩的根本原因是側向加速度過大。因此,筆者采用側向加速度作為大貨車橫向穩定性評價指標。
2.2 車輛橫向穩定性仿真分析
橫向失穩的根本原因是大貨車轉向時,側向加速度過大。其直接原因是由于車輛轉向時轉向半徑Rs過小,圖2是關于轉向半徑Rs的定義。
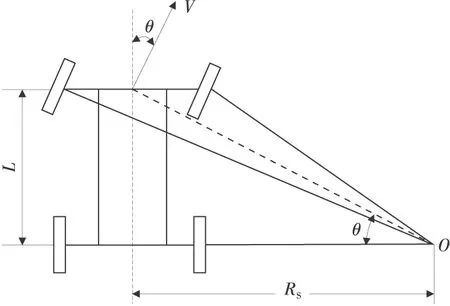
圖2 轉向半徑
車輛由直線路段駛入彎道路段時,駕駛員需要轉動方向盤,通過轉向機構的轉動,使前軸上的內外輪按一定的關系轉過相應的角度,保證內外前輪的垂線與后輪的垂線交在同一點O,此時,車輛將繞O點作圓周運動,O點稱為轉向中心或軌跡的曲率中心,O點到后軸的中心的距離就是車輛的轉向半徑Rs。筆者采用TruckSim軟件可以實時記錄行車過程中大貨車側向加速度的變化,當行車條件處于極限值時,貨車就會發生側滑甚至側翻事故,如圖3。

圖3 大貨車橫向失穩視景
筆者研究急彎陡坡路段以及超車換道時,道路線形指標和駕駛員行為對大貨車橫向穩定性的影響,對于道路因素主要從車輛動力學分析的角度確定影響因素。對于駕駛員行為筆者主要考慮的是駕駛員轉向半徑和行駛速度。由于篇幅所限,只列出部分指標值進行試驗,表1列出了本次仿真的具體策略。

表1 不同道路參數下的仿真策略
圖4分別為大貨車在不同轉向半徑、不同超高、不同行駛速度下行駛時側向加速度隨樁號的變化。
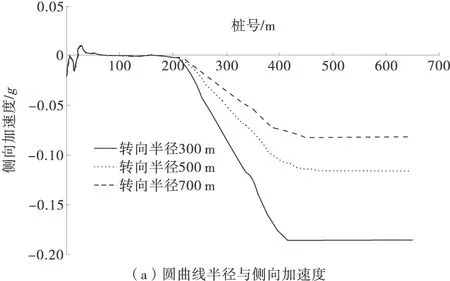
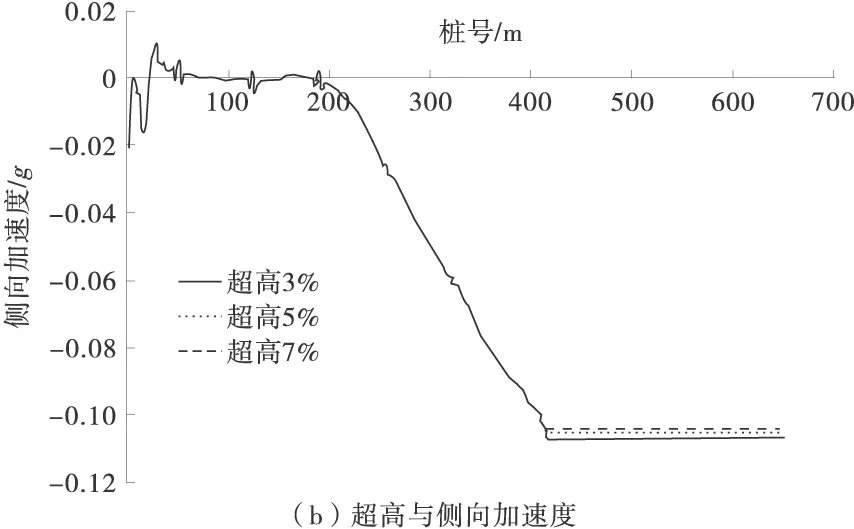
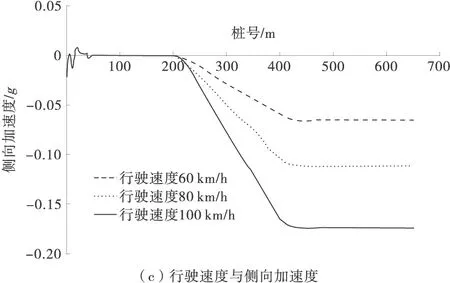
圖4 車輛動力學響應
由圖4可見,樁號0~200 m標段為直線段,開始的50 m左右側向加速度a變化幅度較大,原因是車輛啟動后還沒有達到穩定行駛狀態,當車輛穩定行駛時,側向加速度a基本保持水平狀態,這與現實狀態相吻合。樁號200~400 m標段為緩和曲線段,此路段側向加速度a逐漸增大,原因是曲率逐漸增大,車輛所受的離心力也隨之增大。樁號400~650 m標段為圓曲線段,由于曲率恒定,車輛所受的離心力不變,側向加速度a值也基本保持恒定。因此可以得出:①其他條件保持不變的情況下,在一定的范圍內,隨著轉向半徑的增大,側向加速度a隨之減小;②在一定的范圍內,隨著超高的增大,車輛所受重力的分量橫向下滑力在增大, 側向加速度a也隨之減小;③實際道路上車輛的行駛速度不可能和計算行車速度一致,可能高于也可能低于計算行車速度。圖4(c)中,車輛分別以60,70,80,90,100(超速)km/h的速度轉向,可以看出隨著速度的增大,側向加速度a大幅度增加。
3 平曲線設計控制及大車行駛控制
3.1 大貨車側向加速度模型
取轉向半徑、超高、車輛行駛速度3個指標作為模型的變量,可將大貨車側向加速度預測模型寫為:
a=f(Rs,V,ih)
(1)
運用MATLAB進行回歸分析,分析結果得出相關系數R=0.999 6,殘差平方和為4.194 3×10-5,相關性較好,具體數學方程為:
(2)
式中:Rs為轉向半徑,m;ih為超高;V為車輛行駛速度,km/h;g為重力加速度,m/s2。
3.2 貨車行駛的橫向穩定性
離心力對貨車在圓曲線上行駛的穩定性影響很大,它可能使貨車向外側滑移或者傾覆。為抵消或減小離心力的作用,保證貨車在圓曲線上穩定行駛,應根據需要設置超高。平曲線上貨車的主要受力分析見圖5。
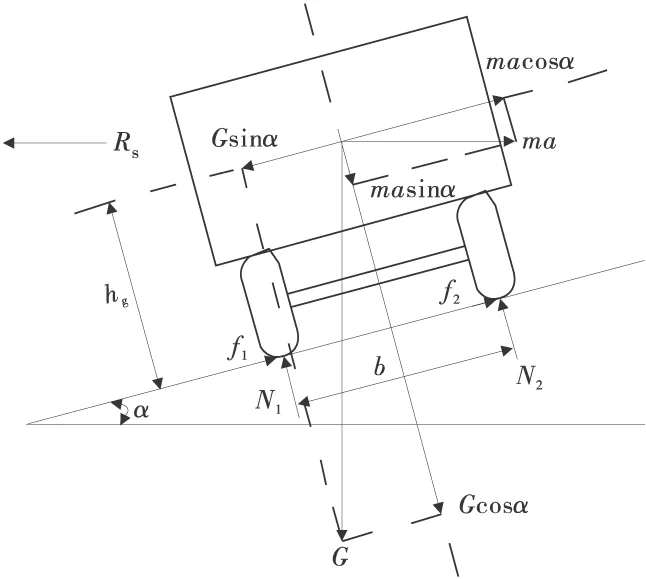
圖5 平曲線上貨車的受力分析
將水平方向合力以及豎向合力分解為平行于路面的橫向力X和垂直于路面的豎向力Y,即:
X=macosα-Gsinα
(3)
Y=masinα+Gcosα
(4)
由于路面超高一般很小,則sinα≈tanα=ih,cosα≈1,將式(2)代入式(3)中得:
(5)
3.2.1 橫向傾覆條件分析
貨車在設有超高的圓曲線上行駛時,由于橫向力的作用,可能使貨車繞外側車輪觸地點產生向外橫向傾覆的危險。為使貨車不產生傾覆,必須使傾覆力矩小于或等于穩定力矩,即:
(6)
式中:hg為車輛的重心高度;b為車輛的輪距。
整理得到貨車不發生側翻的轉向半徑為:

表2 不同設計速度按橫向傾覆條件分析的圓曲線極限最小轉向半徑
3.2.2 橫向滑移條件分析
貨車在設有超高的圓曲線上行駛時,由于橫向力的作用,可能使貨車沿橫向力的方向產生橫向滑移。為使貨車不產生橫向滑移,必須使橫向力小于或等于輪胎和路面之間的橫向摩阻力,即
X≤Gφh
(7)
式中:φh為橫向摩阻系數。
整理得到貨車不發生側向滑移的轉向半徑為:
本次試驗橫向摩阻系數φh、超高ih均按《標準》中極限最小半徑所對應的取值,各設計速度對應的極限最小轉向半徑如表3。

表3 不同設計速度下按橫向滑移條件分析的圓曲線極限最小轉向半徑
注:表2、表3給出貨車超速至100 km/h時的極限半徑。
綜合表2和表3的結果可以看出:
1)《標準》中規定的極限最小半徑能滿足按橫向傾覆條件分析的圓曲線極限最小半徑要求,但是不能滿足按橫向滑移條件分析的圓曲線極限最小半徑要求。
2)按橫向滑移條件分析得出的圓曲線極限最小半徑均比《標準》中規定的圓曲線極限最小半徑在各級設計速度條件下均高10%左右。
3)在平曲線半徑小于表3所規定的極限最小半徑路段,為了避免大貨車產生橫向滑移,可按表格結果對大貨車進行限速并且規范駕駛員行為或者在改擴建過程中進行參考修改。
4 結 論
1)以汽車動力學為基礎,分析了平曲線路段汽車的受力情況,利用MATLAB進行回歸分析,定量的推導出轉向半徑、超高和車輛行駛速度與車輛側向加速度之間的數學關系。以此數學模型為基礎,通過車輛的橫向穩定性分析,參照《標準》采用的參數值,為平曲線設計控制提出了建議指標。顯然,考慮橫向滑移條件計算得到的平曲線極限最小半徑,多自由度大貨車模型比傳統剛體大貨車模型在各級設計速度條件下均大于10%。
2)筆者所得的大貨車側向加速度數學模型可為貨車的側翻、側滑預警提供理論基礎。并對進一步研究平曲線設計控制以及車輛轉向安全保障措施提供良好的參考價值。
3)實際應用中,計算極限最小轉向半徑所需參數,可通過現場調查來確定其值,進而對筆者提出的指標進行適當的修正。
[1] Takano S,Nagai M,Taniguchi T,et al.Study on a vehicle dynamics model for improving roll stability[J].JSAE Review,2003,24(2):149-156.
[2] Frimpong S,Changirwa R,Szymanski J.Simulation of automated dump trucks for large scale surface mining operations[J].International Journal of Surface Mining,Reclamation and Environment,2003,17(3):183-195.
[3] Dahlberg E,Stensson A.The dynamic rollover threshold-a heavy truck sensitivity study[J].International Journal of Vehicle Design,2006,40(1):228-250.
[4] Furtado G.Vehicle Stability on Combined Horizontal and Vertical Alignments[D].Ontario,Canada:Carleton University,2002.
[5] Easa S M,Dabbour E.Design radius requirements for simple horizontal curves on three-dimensional alignments[J].Canadian Journal of Civil Engineering,2003,30(6):1022-1033.
[6] Easa S M,Abd E I Halim A.Radius requirements for trucks on three-dimensional reverse horizontal curves with intermediate tangents[J].Transportation Research Board,2006,1961:83-93.
[7] 丁慶國.基于汽車行駛穩定性的公路平縱組合線形設計指標研究[D].哈爾濱:哈爾濱工業大學,2010. Ding Qingguo.Research on Design Index of Highway Plane and Vertical Combined Alignment Based on Automobile Running Stability[D].Harbin:Harbin Institute of Technology,2010.
[8] 白鋼.基于車輛行駛穩定性仿真的道路幾何線形設計參數研究[D].吉林:吉林大學,2013. Bai Gang.Study on Design Parameters of Road Geometric Alignment Based on Vehicle Handing Stability Simulation[D].Jilin:Jilin University,2013.
[9] 許金良,王恒,趙利蘋.考慮橫風作用的公路平曲線最小半徑研究[J].中國公路學報,2014,27(1):38-43. Xu Jinliang,Wang Heng,Zhao Liping.Research on minimum radius of highway horizontal curve with crosswind considered[J].China Journal of Highway and Transport,2014,27(1):38-43.
[10] 羅京,張冬冬,郭騰峰.大型車輛橫向穩定性對公路設計極限平曲線半徑取值的影響分析[J].中國公路學報,2010,23(1):42-46. Luo Jing,Zhang Dongdong,Guo Tengfeng.Analysis for influence of large vehicle’s lateral stability on ultimate horizontal curve radius of highway design[J].China Journal of Highway and Transport,2010,23(1):42-46.
[11] Kordani A A,Molan A M,Monajjem S,et al.Simulation Modeling of Dynamic Response of Vehicles to Different Types of Speed Control Humps[C]//T&DI Congress 2014:Planes,Trains,and Automobiles.Orlando,Florida:American Society of Civil Engineers,2014.
[12] Rakha H,Yu B.Truck performance curves reflective of truck and pavement characteristics[J].Journal of transportation engineering,2004,130(6):753-767.
[13] 段斌,單穎春,劉獻棟,等.一種半掛汽車列車外擺值的計算方法[J].重慶交通大學學報:自然科學版,2014,33(6):161-166. Duan Bin,Shan Yingchun,Liu Xiandong,et al.Out value algorithm of tractor semitrailer combinations[J].Journal of Chongqing Jiaotong University:Natural Science,2014,33(6):161-166.
[14] 交通部運輸綜合規劃司,長安大學運輸科學研究院.中國高速公路運輸量統計調查分析報告[R].北京:人民交通出版社,2012. Comprehensive Department of Transportation,Chang’an University Transportation Research Institute,The Report of China’s Highway Traffic Volume Survey Analysis[R].Beijing:China Communications Press,2012.
[15] 吳新燁,葛曉宏,羅樹友,等.汽車側翻穩定性研究[J].廈門大學學報:自然科學版,2010,49(6):815-818. Wu Xinye,Ge Xiaohong,Luo Shuyou,et al.Research on vehicle’s stability[J].Journal of Xiamen University:Natural Science,2010,49(6):815-818.
[16] 朱穎,周煒,郭志平,等.基于車輛側傾角側翻預警算法的研究[J].機械設計與制造,2011(2):52-54. Zhu Ying,Zhou Wei,Guo Zhiping,et al.The study of vehicles rollover forewarning algorithm based on pattern recognition[J].Machinery Design & Manufacture,2011(2):52-54.
[17] Chen B C.Warning and Control for Vehicle Rollover Prevention[R].Michigan,USA:University of Michigan,2001.
[18] Palkovics L,Semsey A,Gerum E.Roll-over prevention system for commercial vehicles-addition sensorless function of the electronic brake system[J].Vehicle System Dynamics,1999,32(4):285-297.
[19] Liu P.Analysis,Detection and Early Warning Control of Dynamic Rollover of Heavy Freight Vehicles[D].Quebec,Canada:Concordia University,1999.
Control Index of Horizontal Curve Design Considering Truck’s Lateral Stability
Zhang Chi1, Hua Guilong1, Zhang Min2
(1.Key Laboratory for Special Area Highway Engineering of Ministry of Education, Chang’an University,Xi’an 710064, Shaanxi, China; 2. Traffic Engineering Research Institute, School of Highway,Chang’an University, Xi’an 710064, Shaanxi, China)
In order to study the effects of driving behavior and alignment index on the truck’s lateral stability, six-axle semi-trailer was selected as the typical vehicle model, thus a closed-loop vehicle dynamic model was established by Trucksim. Lateral acceleration was used as the index for risk evaluation. Based on statistical theory, the lateral acceleration regression prediction model was established by MATLAB.The circular curve’s limit minimum steering radii of typical vehicle model was proposed under varied design speeds. The results show that the horizontal curve’s limit minimum radius adopting multi degree truck model which considered lateral sliding conditions, were about 10% larger than the radius adopting traditional rigid truck model under various design speeds .The results quantify the effects of driving behavior and alignment index on the truck’s lateral stability. The advised index for horizontal curve design control was proposed and the result provides a good reference for road safety design.
road engineering; horizontal curve design; Trucksim simulation; truck stability
10.3969/j.issn.1674-0696.2015.03.08
2014-10-20;
2014-11-20
教育部博士點基金新教師項目(20120205120013);交通運輸部應用基礎項目(2014319812170);陜西省自然科學基金項目(2012JQ7001);長江學者和創新團隊發展計劃資助項目(IRT1050);中央高校基本科研業務費專項資金項目(2013G2211005&CHD2011JC048)
張 馳(1981—),男,四川宜賓人,副教授,博士,主要從事交通安全與道路仿真方面的研究。E-mail:zhangchi@chd.edu.cn。
U412.34
A
1674-0696(2015)03-036-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03