基于三角形驅動的機載LiDAR數據柵格化算法
2015-06-07 11:31:42張春亢,趙學勝,鐘新科
地理與地理信息科學 2015年1期
關鍵詞:效率
張 春 亢,趙 學 勝,鐘 新 科
(1.中國礦業大學(北京)地球科學與測繪工程學院,北京 100083; 2.中國科學院地理科學與資源研究所,北京 100101)
?
基于三角形驅動的機載LiDAR數據柵格化算法
張 春 亢1,趙 學 勝1,鐘 新 科2
(1.中國礦業大學(北京)地球科學與測繪工程學院,北京 100083; 2.中國科學院地理科學與資源研究所,北京 100101)
針對基于TIN的機載LiDAR點云數據插值為GRID過程中,大量TIN數據I/O操作導致的柵格化效率下降問題,提出了基于三角形驅動的點云柵格化流式算法:以基于直線正負區判別原理的TIN向GRID轉換新算法為基礎,通過遍歷三角形模擬流計算實現三角形生成、三角形插值為GRID以及內存釋放,有效避免了TIN數據的I/O操作,并可以提高內存利用率。試驗表明:流式算法顯著提高了點云柵格化效率,為海量點云的柵格化及并行計算提供了一種算法支撐。
機載LiDAR點云;柵格化;I/O操作;流計算;三角形驅動
作為一種高精度、高密度、快速獲取地面三維信息的有效手段,機載LiDAR已成為生成數字地面模型(DTM)的重要工具[1]。而作為DTM的兩種主要表達方式,規則格網(GRID)相對于不規則三角網(TIN)具有數據結構簡單、存儲量小、分析與計算方便等優點[2]。將LiDAR點云柵格化,不但便于其管理與表達,也為其濾波與應用創造了條件,但在柵格化大量LiDAR點云的過程中,因數據的I/O操作時間超過CPU計算時間而成為制約轉換效率的瓶頸[3-5]。在實現較大數據量的點云直接插值為GRID時,只需將點云以一定的數據結構進行劃分重組,即可提高I/O操作的效率,實現點云向GRID的高效轉換[4,5]。與直接插值方法相比,利用點云生成TIN,然后將TIN內插為GRID具有更高的精度和效率[2]。傳統TIN插值為GRID通常采用對生成的TIN數據進行分塊并建立索引,然后逐個判斷待插值格網節點在哪個三角形中,進而計算格網點屬性值的插值策略[6]。因此,在實現基于TIN的點云數據插值為GRID時,需首先將點云剖分為TIN并進行存儲,然后完成TIN向GRID轉換。這種基于格網節點驅動的分步轉換方法雖然易于理解與實現,但轉換過程中涉及中間數據TIN的I/O操作。離散點的數量m(m≥3)與其所構建的三角形數量n滿足條件[7]:m-2≤n≤2m-5。實驗發現,當m較大時,n逼近2m,并且TIN復雜的數據結構決定其數據量要遠大于離散點本身的數據量,所以點云數據比較大時,對計算機內存也有較高要求。通過上述分析,本文引入流計算的思想,以TIN向GRID轉換新算法為基礎,對基于TIN的點云柵格化流程進行了改造,以避免TIN數據的I/O操作,提高柵格化效率及內存利用率。
1 基于三角形驅動的流式算法
1.1 算法原理
流式算法的基本思想為:利用逆向思維,依據直線正負區判別原理,提出一種新的TIN向GRID轉換算法,使構成TIN的每個三角形能夠獨立地實現其內格網節點判斷及其屬性值的計算;同時引入流計算的思想,實現三角形的構建、三角形插值為GRID和內存的釋放在三角形驅動下,以流水線的形式進行組合,從而避免TIN數據的I/O操作并提高內存的利用率。流式算法步驟如下:1)對于點云數據,利用Delaunay三角網構建算法生成一個三角形T;2)利用本文提出的基于直線正負區判別原理的TIN向GRID轉換算法,對三角形T所包含的格網節點進行判斷與插值;3)存儲完成插值的格網節點屬性值,釋放三角形T和格網節點所占用的內存資源;4)重復步驟1-3,直至TIN構建完成,實現所有三角形包含的格網節點的判斷與插值;5)對未包含在任何三角形內的格網節點賦予一個特定屬性值,算法結束。
在流式算法的實現過程中,Delaunay三角網構建算法需要選用三角網生長算法或分治算法,以便在TIN構建過程中不間斷地釋放符合Delaunay三角網準則、不需再優化的三角形,從而形成數據流。本文詳細闡述基于直線正負區判別原理的TIN向GRID轉換算法。
1.2 基于直線正負區判別原理的TIN向GRID轉換算法
存在一直線,假定直線兩邊分別為該直線的正區與負區,有如下公式:
(1)
其中:A=(y2-y1)/(x2-x1),B=(x2y1-x1y2)/(x2-x1),(x1,y1)、(x2,y2)為直線上兩點坐標。對于任意一點P(x,y),可利用下式判斷該點處于直線的正區或負區:
(2)
由式(1)、式(2)可知:平面內兩點的表達式同號時,則兩點位于直線段的同側;表達式異號時,兩點位于直線段的異側。
依據上述直線正負區判別原理,TIN向GRID轉換算法描述如下:1)如圖1,對于構成TIN的一個三角形ABC,根據其頂點坐標,計算其頂點在x與y方向上坐標的最大(小)值xmax(xmin)、ymax(ymin);2)根據xmin、xmax、ymin、ymax與格網大小,計算格網的起始行Ymin和終止行Ymax以及起始列Xmin和終止列Xmax,則直線x=Xmin、x=Xmax、y=Ymin和y=Ymax相交構成矩形EFGH,計算矩形內格網節點的坐標值;3)將三角形的3個頂點A、B、C與三角形的三邊AB、AC、BC組成三組點線數據A、BC,B、AC和C、AB,對于需要判斷的格網節點P,當點P與三組點線數據中的點相對于該組中的線段運用式(1)與式(2)計算的值都同號時,則點P在三角形ABC內,否則,點P在三角形外;4)根據三角形頂點的坐標及其屬性值內插三角形內格網節點的屬性值;5)重復步驟1-4,遍歷TIN中的三角形,實現TIN向GRID的轉換。
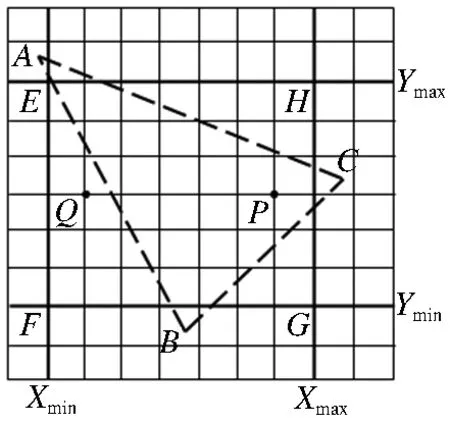
圖1 三角形插值為格網節點示意
2 實驗與分析
2.1TIN向GRID轉換算法實驗與分析
實驗環境為Intel(R)Pentium(R)DCPU(3.40GHz),1G內存。圖2為本文算法的測試效率,其格網分辨率約1.6個節點/三角形。文獻[6]與本文算法效率對比見表1。分析可知:本文算法的時間復雜度為O(n),n為構成TIN的三角形個數;本文算法比傳統算法在效率上有明顯的提高,當點云數量或格網分辨率增大時,效率優勢更加突出。因此,在算法效率與時間復雜度方面,本文算法更適合海量點云的處理。

圖2 TIN向GRID轉換效率

點數(個)三角形數(個)行列數(行數×列數)本文算法所用時間(s)文獻[6]算法所用時間(s)843816754800×6000.22.310986218043200×24003.372.5
2.2 流式算法實驗與分析
表2為流式算法測試結果,其中TIN的生成利用文獻[8]提出的分治算法。作為對比,測試了基于格網節點驅動的分步轉換算法的時間,包括TIN的生成、TIN的I/O操作與TIN插值為GRID三部分時間。由測試結果可知:1)TIN的I/O操作占用了分步轉換算法消耗的大部分時間,嚴重制約了轉換算法的效率,可見,避免TIN的I/O操作對于提高點云柵格化效率意義重大;2)因避免了TIN的I/O操作,流式算法在效率上比分步轉換算法有了顯著提高;3)相比于分步測試中TIN構建與TIN插值為GRID的時間和,流式算法多消耗了部分時間,這些時間主要用于內存空間的申請與釋放。另外,因文獻[8]是一種分治算法,其遞歸的特性使其對內存空間要求較高,無法對更大數據量的機載LiDAR點云進行處理。
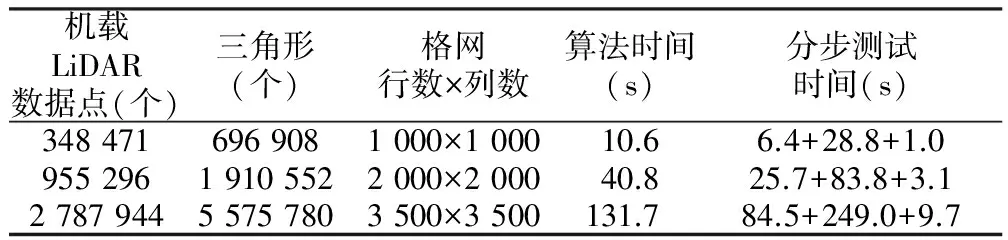
表2 流式算法測試結果
并行計算是處理海量空間數據的有效方法[3,5],串行算法并行化的一個難點在于任務分解。分步算法在進行并行化時任務分解較困難,流式算法基于三角形驅動的轉換方式使任務分解相對簡單,點云的柵格化并行處理也易于實現。
3 結論
流計算是避免I/O操作的一種有效方式,本文針對基于TIN的點云柵格化方法存在的缺陷,對柵格化過程進行了改進,即通過遍歷三角形模擬流計算,有效避免了TIN數據的I/O操作,提高了內存利用效率,實現了大量點云的快速柵格化。下一步將著重研究兼顧算法時間和空間性能的 Delaunay三角網剖分算法,用于海量點云數據的柵格化流式處理及并行計算。
[1] KOBLER A,PFEIFER N,OGRINC P,et al.Repetitive interpolation:A robust algorithm for DEM generation from Aerial Laser Scanner data in forested terrain[J].Remote Sensing of Environment,2007,108(1):9-23.
[2] 李志林,朱慶.數字高程模型[M].武漢:武漢測繪科技大學出版社,2000.34-59.
[3] 宋效東,劉學軍,湯國安,等.DEM與地形分析的并行計算[J].地理與地理信息科學,2012,28(4):1-7.
[4] AGARWAL P K,ARGE L,DANNER A.From point cloud to grid DEM:A scalable approach[A].The 12th International Symposium on Spatial Data Handing[C].2006.771-788.
[5] GUAN X F,WU H Y.Leveraging the power of multi-core platform for large-scale geospatial data processing:Exemplified by generating DEM from massive LiDAR point clouds[J].Computers & Geosciences,2010,36(10):1276-1282.
[6] 吳飛,吳凡.TIN向規則格網DEM轉換的快速算法[J].測繪科學,2005,30(4):76-77.
[7] 章孝燦,黃智才,戴企成,等.GIS中基于拓撲結構和凸殼技術的快速TIN生成算法[J].計算機學報,2002,25(11):1212-1218.
[8] 胡金星,潘懋,馬照亭,等.高效構建Delaunay三角網數字地形模型算法研究[J].北京大學學報(自然科學版),2003,39(5):736-741.
2014-06-16;
2014-08-19
高等學校博士學科點專項科研基金項目(20130023110001)
張春亢(1984-),男,博士研究生,主要研究方向為LiDAR數據處理及應用。E-mail:chkang.chd@163.com
10.3969/j.issn.1672-0504.2015.01.026
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32