虛擬軸機床定位方法*
2015-06-10 00:34:46賈育秦胡曉雄
振動、測試與診斷 2015年1期
賈育秦, 胡曉雄
(太原科技大學機械工程學院 太原,030024)
?
虛擬軸機床定位方法*
賈育秦, 胡曉雄
(太原科技大學機械工程學院 太原,030024)
提出一種基于改進的多傳感器一致性數據融合的虛擬軸機床定位方法,在虛擬軸機床動平臺的位姿測量中使用了視覺技術與電子羅盤,解決了虛擬軸機床動平臺上的主軸定位問題。此方法將虛擬軸機床各根桿上的編碼器信息、視覺信息與動態慣性的測量數據進行數據融合,經過動態計算獲得置信距離的關系矩陣,虛擬軸機床動平臺的位置與姿態的精確定位得到了保證。經過一個單軸單方向的運動測量簡化試驗,將虛擬軸機床動平臺6自由度位姿的測量作為研究對象,對其進行仿真試驗。試驗結果也表明了該定位方法有效可行。
虛擬軸機床; 多傳感器; 定位; 數據融合
引言
虛擬軸機床是機器人領域的研究熱點,國內外已經研制出各式各樣的虛擬軸機床的樣機。快速的響應速度、很強的環境適應能力和技術附加值及較大的剛度重量比是虛擬軸機床的重要優點[1-2]。由于桿件的干涉、鉸鏈的約束尤其是位姿(位置與姿態)耦合等因素對其有很大影響[3-5],因此虛擬軸機床的工作空間受到了限制,控制系統異常復雜且要求具有較高的制造精度[6]。如何精確測量每根桿長的變化是虛擬軸機床主軸定位精度的重要技術所在。使用激光干涉儀可以精確測量虛擬軸機床每根桿長的變化,但是花費大,不易廣泛應用。例如,美國Giddings and Lew 公司制造的Variax機床,每根桿的制造費用就達3萬美元[7]。另外一種測量方法是使用編碼器,由于其對熱膨脹、磨損與機械的沖擊等因素造成的桿長變形難以精確測量,通常采用絲桿回轉數的換算進行測量,且定位精度會由于其誤差通過正運動學方程傳遞到動平臺的位姿而降低。因此,對測量方法的研究已經迫在眉睫[8-9],這對于虛擬軸機床精度的提高及廣泛應用具有現實意義。
筆者利用虛擬軸機床系統中的冗余信息,將編碼器的數據、攝像頭與電子羅盤測度的數據依照概率源合并的理論進行數據融合,提出一種基于改進的多傳感器一致性數據融合的虛擬軸機床定位方法。
1 改進的多傳感器一致性數據融合算法
當相同的指標參數被多傳感器測量時,使用高斯概率密度函數表示傳感器的測量數學模型為
(1)

定義置信距離的測量度

(2)

傳感器相互間的支持程度可由dij來表示。例如,dij=0.8表示若xi值為估計值,則xj值處于其80%的置信范圍中。dij值愈大,表示傳感器相互間的測量值出現錯誤的概率愈大;相反,則表示一致性地體現了測量對象的真實性。
(3)
式(3)表示置信距離矩陣,使用其可以解出關系矩陣,并且通常dij的界限值ε往往需要先前若干次的測量結果或者經驗來確定,設
(4)
(5)
其中:rij,rji為第i,j個傳感器的互相支持度;R為非負對稱矩陣。
當第i,j個傳感器互相不支持時,rij=rji=0;相反,則rij=rji=1。要得到某一傳感器的有效讀數,該傳感器的讀數必須被非常多的傳感器所支持,反之亦然。因此要想進行數據融合必須選取具有有效讀數的傳感器。但是在求解關系矩陣的過程中,被選擇的界限值ε比較絕對,且在某一程度上靠經驗確定,這就引起了主觀因素對融合結果的很大干擾,不適用于實際。

(6)
2 多傳感器綜合支持程度的數學建模
考慮到rij只是xj對xi的支持程度,xi真實程度是由r1i,r2i,…,rni綜合確定,而不是由單一的rij確定。假定xi的綜合支持程度為ri,ri愈大則表示xi的真實程度愈高,即在多傳感器數據融合中占有的地位愈高,故重要問題是如何計算ri。利用概率源合并理論可以解決該問題,即給定α1,α2,…,αn為一組非負數,則
ri=α1r1i+α2r2i+…+αnrni
(7)
其中:i=1,2,…,n;α1+α2+…+αn=1。
將式(7)變換為矩陣的形式,則
r=Rα
(8)

根據Perron-Frobeniius定理可知,R具有最大模的特征值,且它的特征值大于零,即λ>0,它的特征向量γ滿足
λγP=Rγ
(9)

λγ可以度量多傳感器的綜合支持程度,由矩陣變換可得
λγk=λ1ri1+γ2ri2+…+γnrin
(10)
其中:k=1,2,…,n;rk為第k個傳感器的綜合程度。
由式(7)~(10)可知,α可以由γ歸一化后獲得,則

(11)
顯然,依照多傳感器的綜合支持程度,最優的融合組是由s個具有有效讀數的傳感器組成。融合數據可以由最優的融合組中傳感器得到的數據與多傳感器局部決策獲得的數據綜合得到。
(12)
3 基于多傳感器數據融合的虛擬軸機床動態定位

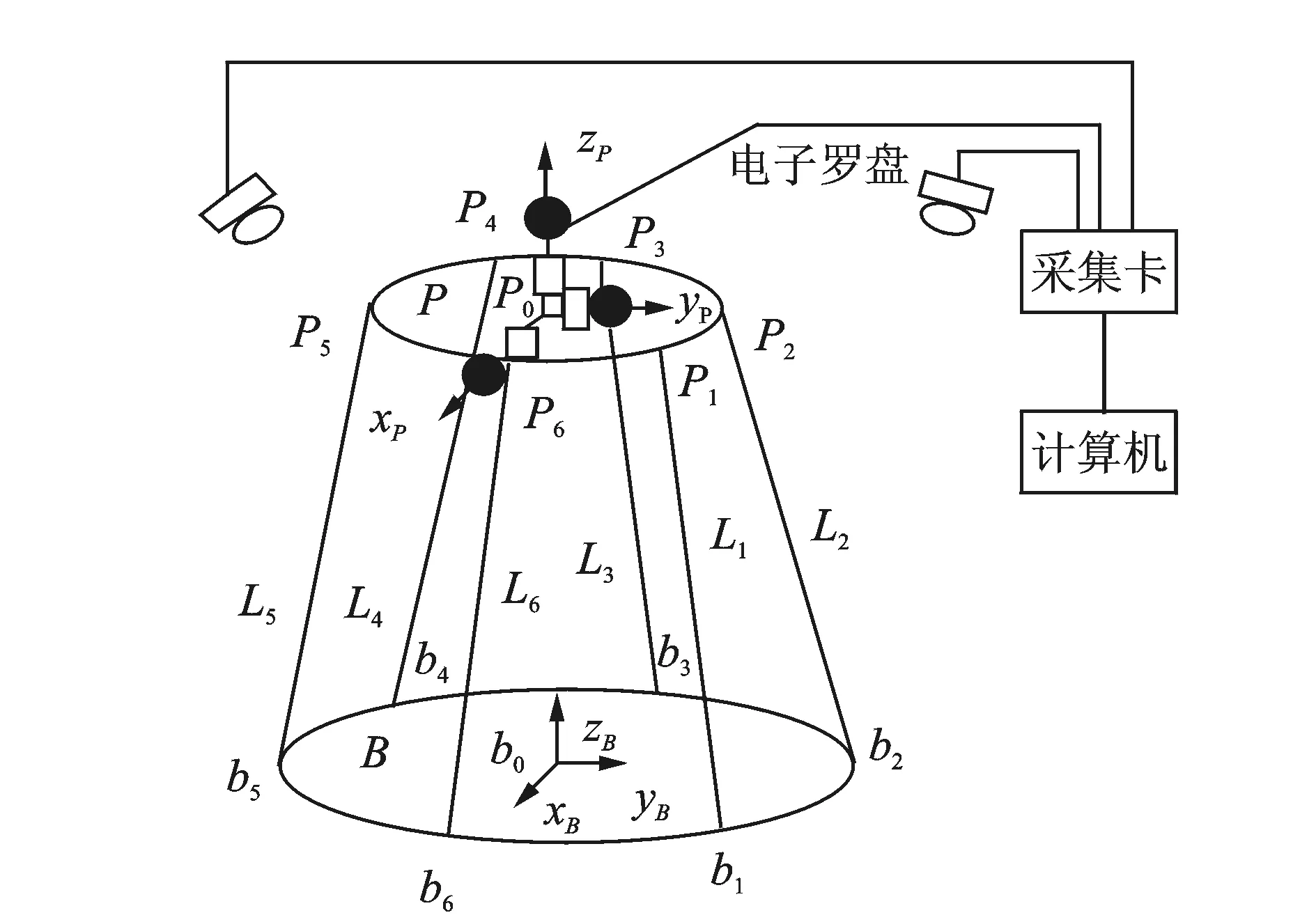
圖1 虛擬軸機床系統示意圖Fig.1 The diagrammatic sketch of virtual axis machine tool system
4 仿真試驗
在仿真試驗中,由于虛擬軸機床的動平臺位姿是由多傳感器實施測量、數據的處理與算法的驗證。因筆者提出的算法具體實施過程復雜,故簡化了第1階段試驗過程的直接測量方法,即將單軸單方向的運動作為仿真試驗研究對象,以驗證所提出算法在該系統中單軸單方向的測量有效性,并拓展到6桿6自由度虛擬軸機床的試驗研究中。在仿真試驗中,單軸單方向運動的實時位置測量可以由Renishaw激光干涉儀進行,并為此測量系統提供了參考標準。其中,ε=0.5,且令ε1=0.2,ε2=0.8。
獲得各個傳感器的測量數據后,同時對其進行處理,把編碼器、攝像頭與電子羅盤的位置測量數據利用數據融合算法進行融合,獲得了較好的位置結果。通過仿真試驗可知,對100 mm的單軸單方向的運動而言,電子羅盤的測量精度在此融合算法下得到了相當大的提高,由6 mm提高到0.02 mm。單根桿變化的虛擬軸機床動平臺位姿(位置與姿態)仿真試驗結果如圖2所示。單方向運動測量得到的速度曲線如圖3所示。由圖3可知,動態特性包含在此融合算法測量中,并且和使用激光干涉儀測量結果非常接近,一切動態信號在編碼器的測量中是找不到的,同理對于多軸多方向運動的測量獲得了同樣的效果。
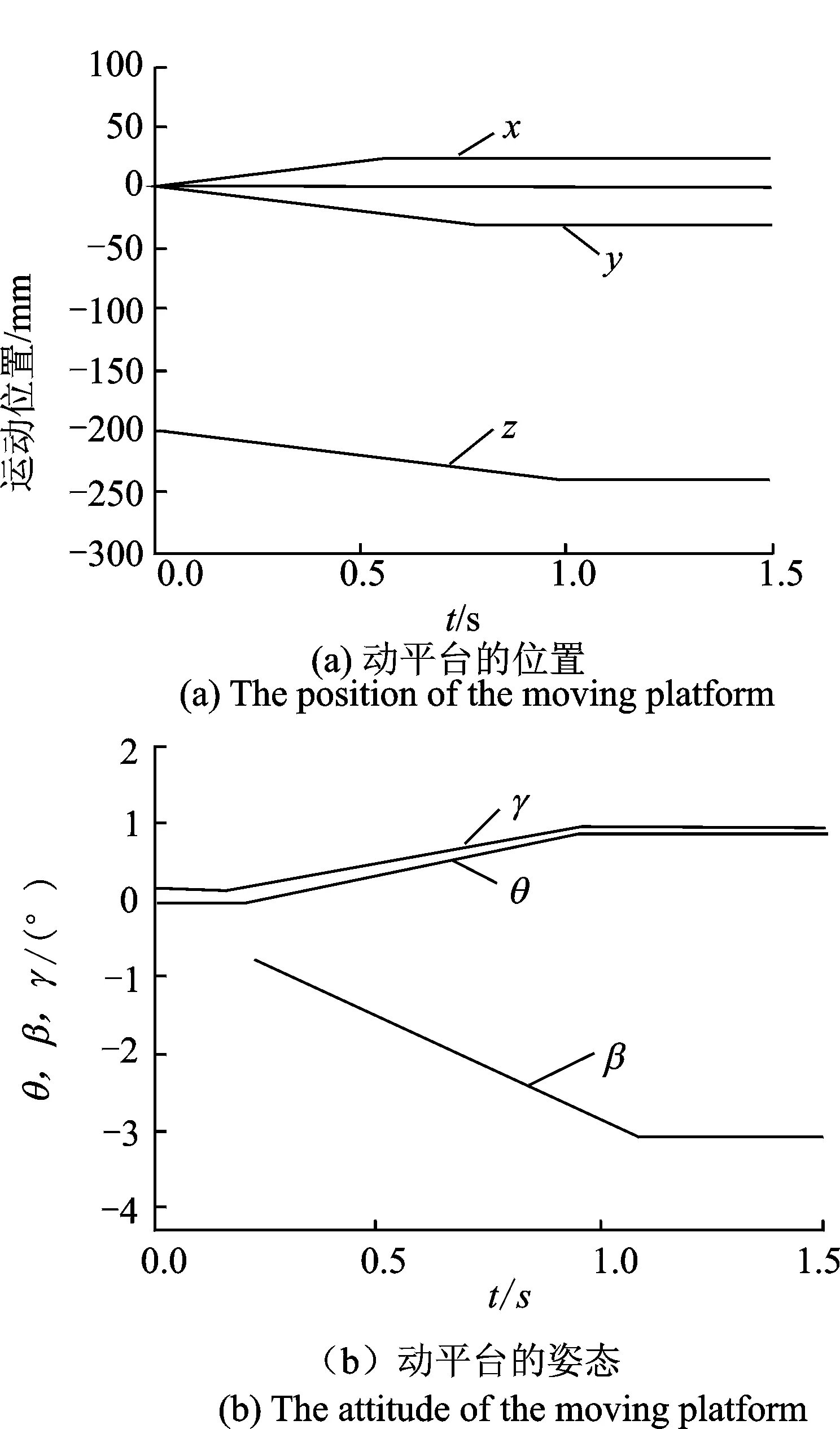
圖2 單根桿變化的虛擬軸機床的動平臺位姿Fig.2 The position of the virtual axis machine tool moving platform of a single axle change

圖3 單方向運動測量獲得的速度曲線Fig.3 The speed curve of the single direction movement measurement
可見,與一般的多傳感器一致性數據融合算法相比,本研究定義的置信距離的多傳感器一致性數據融合算法融合精度更高,可剔除多傳感器測量數據中的疏失誤差,能夠獲得較多支持程度的信息且算法簡單,易在計算機上實現,因此該方法適合應用于6桿6自由度虛擬軸機床定位。
5 結束語
提出一種基于改進的多傳感器一致性數據融合算法的虛擬軸機床動態定位方法,在虛擬軸機床動平臺的位姿測量中使用視覺技術與電子羅盤,解決了主軸動態定位問題。雖然編碼器、電子羅盤與攝像頭分別具有不反映動態特性、誤差偏移和視覺模糊性等缺陷,但通過數據融合算法可以在此系統中獲得很好地互相彌補。單軸單方向運動的仿真試驗表明,提出的算法對虛擬軸機床定位精度有明顯提高,可對動態性能做出有效反映。此外,可對各個傳感器在采集數據中的誤差實施有效控制,以獲得更高的定位精度,對虛擬軸機床的研制與實際應用具有現實意義。
[1] 李保坤, 曹毅力, 張秋菊, 等. Stewart并聯機床位置奇異研究[J]. 機械工程學報, 2012, 48(9): 33-42.
Li Baokun, Cao Yili, Zhang Qiuju,et al. Position-singularity analysis of the stewart parrallel mechanism[J]. Journal of Mechanical Engineering, 2012, 48(9):33-42. (in Chinese)
[2] 阮鴻雁,宋振達,張虎,等. 激光加工用三平移并聯機床的分析與研究[J]. 機械設計與制造, 2012, 10(10):105-107.
Ruan Hongyan, Song Zhenda, Zhang Hu, et al. The analysis and research of a laser manipulator based on three DOFS translational parallel structure[J]. Machinery Design and Manufacture, 2012, 10(10):105-107. (in Chinese)
[3] Cheng Shili, Wu Hongtao, Wang Chaoqun, et al. A novel method for singularity analysis of the 6-SPS parallel mechanisms[J]. Science China, 2011, 54(5):1220-1227.
[4] 王傳強,趙恒華. 3-TPT并聯機床奇異性及平穩性研究[J]. 組合機床與自動化加工技術,2010(10): 26-29.
Wang Chuanqiang, Zhao Henghua. Study on the singularity and stationarity of 3-TPT parallel machine tool [J]. Modular Machine Tool & Automatic Manufacturing Technique, 2010(10):26-29. (in Chinese)
[5] Huang Zhen, Chen Longhui, Li Yanwen. The singularity principle and property of Stewart parallel manipulator[J]. Journal of Robotic Systems, 2003, 20(4):163-176.
[6] 趙明揚,余曉流.一種并聯機床運動平臺位姿測量方法[J].中國機械工程, 1999, 10(10): 1112-1113.
Zhao Mingyang, Yu Xiaoliu. A new method for measuring the movable platform position and orientation of parallel machine tool[J]. China Mechanical Engineering, 1999, 10(10): 1112-1113. (in Chinese)
[7] Soons J A. Error analysis of a hexapod machine tool[C]∥3rd Intemational Conference and Exhibition on Laser Metrology and Machine Perfomance. Singapore: [s.n.],1997: 347-358.
[8] 秦海勤,徐可君,隋育松,等. 基于系統信息融合的滾動軸承故障模式識別[J]. 振動、測試與診斷, 2011, 31(3):372-376.
Qin Haiqin, Xu Kejun, Sui Yusong, et al. Rolling bearing fault pattern recognition based on fusing random, gray and fuzzy information[J]. Journal of Vibration, Measurement & Diagnosis, 2011, 31(3): 372-376. (in Chinese)
[9] 刁聯旺,王常武,商建云,等.多傳感器一致性數據融合方法的改進與推廣[J].系統工程與電子技術,2002,24(9): 60-63.
Diao Lianwang,Wang Changwu, Shang Jianyun,et al. improved and generalized consensus data fusion method[J]. Systems Engineering and Electronics, 2002, 24(9): 60-63. (in Chinese)
[10]孫堅,丁永生,郝礦榮.基于電子羅盤的新型3-2-1Stewart 平臺實時運動學正解法[J]. 機床與液壓, 2008, 36(9): 3-5.
Sun Jian, Ding Yongsheng, Hao Kuangrong. Real-time forward kinematics based on electronic compass for a novel 3-2-1 stewart platform[J]. Machine Tool & Hydraulics, 2008, 36(9): 3-5. (in Chinese)
[11]吳笛飛, 丁永生, 郝礦榮, 等. 一種新型的并聯機器人位姿體視覺檢測系統[J].計算機工程與應用, 2007, 43(33): 190-193.
Wu Difei, Ding Yongsheng, Hao Kuangrong, et al. New stereo vision position and orientation measurement system for parallel robot[J]. Computer Engineering and Applications, 2007, 43(33): 190-193. (in Chinese)

*國家自然科學基金資助項目(50905075);國家高技術研究發展計劃("八六三"計劃)資助項目(2009AA04Z219);國家科技重大資助專項基金資助項目(2009ZX04014-014);教育部科學技術研究重點項目(212042);高等學校博士學科點專項科研基金資助項目(SRFDP)(2009322710007)
2013-03-07;
2013-05-21
10.16450/j.cnki.issn.1004-6801.2015.01.024
TH122; TP137
賈育秦,男,1954年12月生,教授、碩士生導師。主要研究方向為現代制造技術。曾發表《基于小波分析的超精密數控加工過程誤差控制策略》(《機床與液壓》2006年第6期)等論文。 E-mail:tyhmijyq@163.com 通信作者簡介:胡曉雄,男,1988年9月生,碩士研究生。主要研究方向為現代制造技術。 E-mail:hxx0903@163.com
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
今日農業(2021年19期)2022-01-12 06:16:36
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中老年保健(2021年11期)2021-08-22 03:15:44
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
