基于電驅動技術的全方位移動平臺
2015-06-15 19:11:36顏南明張豫南王雙雙
裝甲兵工程學院學報 2015年3期
顏南明, 張豫南, 王雙雙, 張 健
(裝甲兵工程學院控制工程系,北京 100072)
基于電驅動技術的全方位移動平臺
顏南明, 張豫南, 王雙雙, 張 健
(裝甲兵工程學院控制工程系,北京 100072)
基于4輪獨立電驅動技術、網絡控制技術和全方位輪技術,研究了一種在不改變自身姿態情況下實現全方位移動功能的運動平臺,并著重闡述了全方位輪的結構、布局及其驅動控制技術。試驗與應用結果表明:平臺靈活的機動性能可解決狹小空間內的物資搬運以及快速、準確定位與對接問題。
全方位輪;電驅動;全方位移動平臺
全方位移動指的是沿任意方向平動、任意半徑轉向以及二者之復合的運動模式。目前實現全方位移動主要有2種方式:1)通過機械設計,使傳統的驅動輪具有足夠的旋轉角(大于90°)來實現全方位移動;2)通過對驅動輪進行特殊設計(設計成全方位輪),結合相應的獨立驅動控制方法來實現全方位移動。方式1)多采用機械傳動方式,為了獲得大于90°的驅動輪擺角和原地轉向功能,其機械設計復雜,成本高,因此在實際應用中并不多見;方式2)多采用電傳動方式,結合驅動輪的特殊設計及相應的驅動控制策略,其擴展性強,因此應用領域越來越廣泛。考慮到開發和應用成本以及技術發展趨勢,目前的全方位移動平臺多采用方式2),本文稱之為電傳動全方位移動平臺,該平臺的關鍵技術包括2個方面:一是驅動輪的設計,與普通的驅動輪不同,用于全方位移動技術的驅動輪結構比傳統的驅動輪復雜得多,本文稱之為全方位輪;二是驅動控制技術,要實現全方位移動,各全方位輪的驅動必須是獨立驅動,通過對各個全方位輪旋轉速度和方向的協調控制來實現平臺的全方位移動。20世紀80年代至90年代初,美國海軍、陸軍就將這種電傳動全方位移動技術應用于航空母艦、軍艦上物資和彈藥的運輸及裝卸[1],但關于全方位輪設計以及全方位移動平臺控制技術方面的研究,目前還未見到相關報道。國內全方位移動技術的應用較少,主要用于小機器人移動控制,平臺質量均較輕[2-3],而全方位移動技術在物資搬運等領域的應用還未見到相關報道。基于此,本文設計了1 t級基于4×4獨立電驅動的全方位移動平臺方案,并在平臺原型的基礎上驗證了控制算法。
1 總體方案
全方位移動平臺主要組成結構如圖1所示,包括綜合控制器、CAN總線系統、4個驅動電機及電機驅動器、減速器、全方位輪、動力電池組、各種傳感器、操縱桿以及遙控系統等。該平臺除了有人駕駛模式外,還可以通過遙控終端進行操控。工作時,由綜合控制器接收來自操控者的指令信息;然后,通過CAN總線向4個電機驅動器發送速度指令,每個電機驅動器控制電機形成特定的旋轉方向和速度;最后,通過減速器傳遞到每個全方位輪上。由于全方位輪在地面上形成的驅動力大小和方向與全方位輪的旋轉速度大小和方向相關,因此通過控制4個全方位輪的速度大小和方向就可以控制整個平臺總的驅動力大小和方向,從而實現全方位移動。
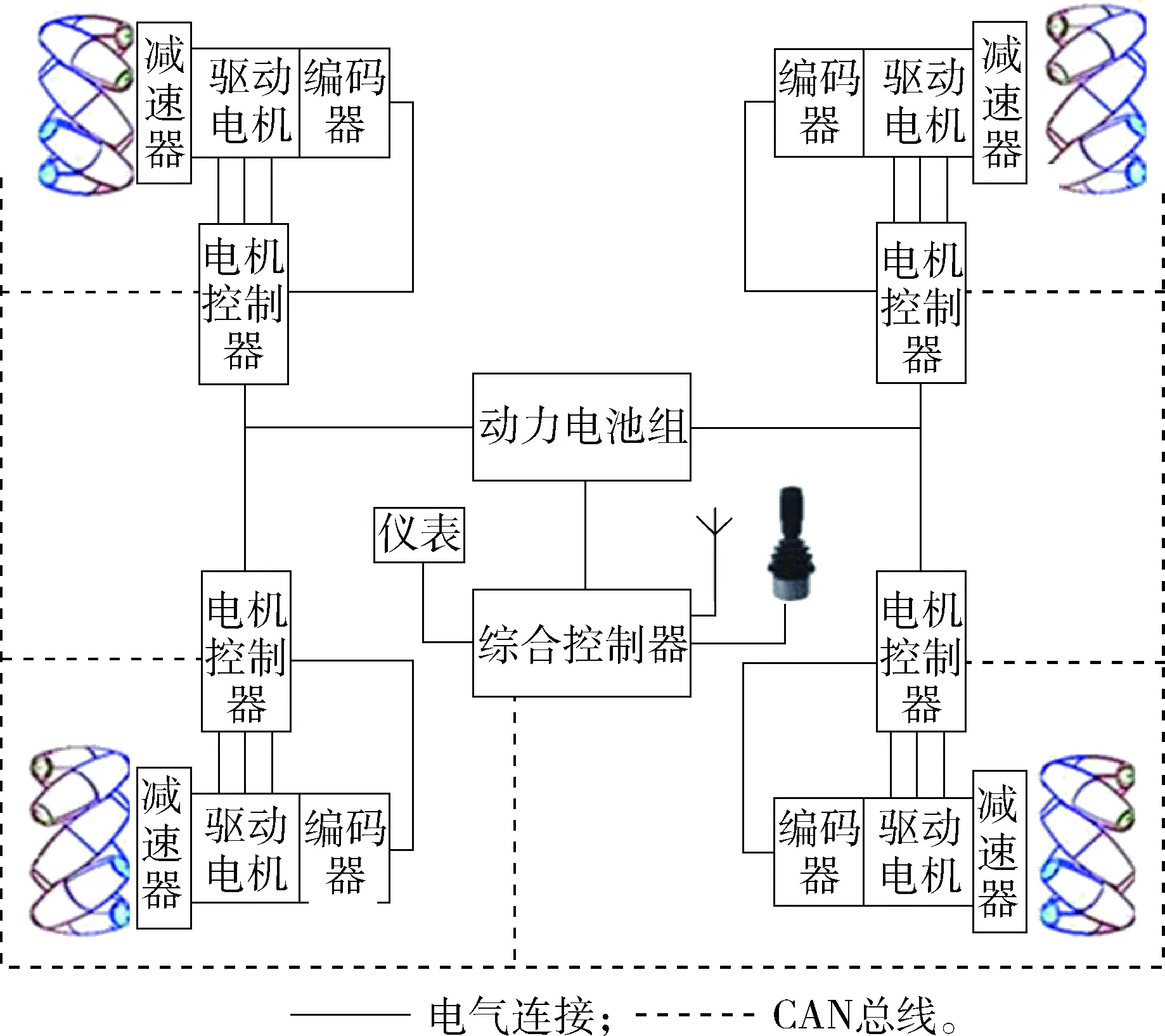
圖1 全方位移動平臺主要組成結構
2 全方位輪結構及布局
全方位輪是實現平臺全方位移動的核心部件之一,因此要實現全方位移動,首先要設計全方位輪。全方位輪從基本結構上劃分,主要包括麥克納姆輪、雙排全方位輪、單排全方位輪、連續切換輪、正交輪和球輪等[4-5]。全方位輪結構的選擇不僅要考慮全方位輪的布局、承重能力、控制方式,還要考慮全方位輪制作成本和應用的可拓展性,筆者選擇麥克納姆輪結構作為全方位輪的結構,如圖2(a)所示。
從圖2(a)可以看出:麥克納姆輪結構由一組自由旋轉的輥輪和輪轂組成,考慮到各向運動的平衡性[6],輥子一般以45°角均勻安裝在輪轂的周圍。這種結構特點使輪子不僅可以沿著垂直于輪軸的方向運動,而且可以在輪軸的±45°范圍內朝任意方向運動,如果平臺的軸距和輪距相等,則可以實現平臺橫向和縱向相同的運動特性。設計這種全方位輪的關鍵在于:根據輪子的承重選擇輪子的材料,確定輪子外圓半徑、輥輪個數、輥輪長度、輥輪中間直徑以及輥輪小端直徑,以保證全方位輪的外圓側面投影精確成圓[7-9]。
在實際設計和應用全方位移動平臺時,還必須確定全方位輪的個數與實現全方位移動功能的關系。要實現穩定的全方位移動功能,一般而言,全方位輪數量≥3,應用中常見的是3輪和4輪平臺。除了全方位輪數量上的區別,在輪子的布局上也有2種不同的方式,即向心式布局(如圖2(b)所示)和縱向對稱式布局(如圖1所示),不同布局方式對應的控制方法也不同[10]。3輪平臺中輪子的布局采用向心式布局;4輪平臺因支撐穩定可靠、驅動力均衡,在實際應用中采用較多。因此,筆者采用4輪縱向對稱式布局作為全方位移動平臺的行走機構。
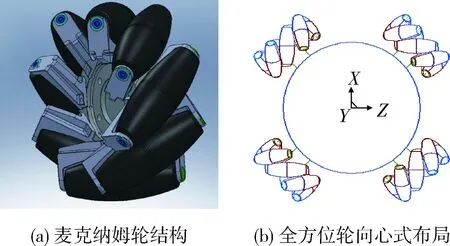
圖2 麥克納姆輪結構和向心式布局
3 全方位移動平臺控制技術
要實現全方位移動功能,除了全方位輪以外,還需要配套的控制系統。通過分析全方位輪結構和運動特性,可知每個全方位輪具有3個運動自由度[6]:一是繞輪子軸線轉動;二是沿輥子軸線垂線方向平動;三是繞輪子和地面的接觸點轉動。每個輥子也具有3個自由度:一是繞輥子軸線轉動;二是繞輪子軸線轉動;三是繞輪子和地面的接觸點轉動。當全方位輪以圖1所示的方式固定在平臺車體上時,每個全方位輪旋轉時都會產生一個與車體縱向軸線成45°的牽引力,力的方向與全方位輪的旋轉方向相關,力的大小和全方位輪的旋轉速度大小有關。在控制系統的作用下,通過控制不同全方位輪的旋轉速度大小和方向,就可以控制4個全方位輪產生的合力大小和方向,從而推動平臺車體朝合力的方向運動,實現全方位移動。本文采用的全方位移動平臺控制系統結構如圖3所示。

圖3 全方位移動平臺控制系統結構
該控制系統結構分為上、下2層:上層為綜合控制,由綜合控制器對駕駛員指令信號進行采集、分解和計算;下層為單個全方位輪的電機驅動系統,電機輸出軸通過減速器與全方位輪的輪轂相連,由電機控制器接收上層綜合控制器發過來的電機轉速和旋轉方向指令,控制電機按指令要求運行。上層綜合控制器的指令傳到下層電機驅動系統通過CAN總線實現。
通過對全方位移動平臺的動力學、運動學分析,上層綜合控制器根據駕駛員操控指令按照式(1)所示的控制策略進行運算和分配平臺4個驅動電機的轉速和旋轉方向。
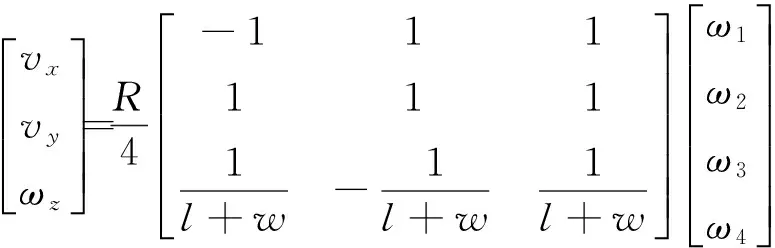
(1)
式中:vx、vy、ωz分別為全方位移動平臺橫向速度、縱向速度和自身旋轉角速度;R、l、w分別為全方位輪半徑、全方位移動平臺的輪距和軸距;ω1、ω2、ω3、ω4分別為全方位移動平臺右前輪、左前輪、左后輪、右后輪的旋轉角速度。
要實現全方位移動平臺沿某一方向以一定的速度運動,因vx、vy、ωz為已知量,則控制系統只要控制4個全方位輪以ω1、ω2、ω3、ω4的角速度進行旋轉即可,這里旋轉速度包括方向。要實現全方位輪控制,也就是驅動電機速度大小和方向的控制,就需要對電機進行速度閉環控制,全方位移動平臺采用異步電機為驅動電機,其控制結構和控制策略如圖4所示。
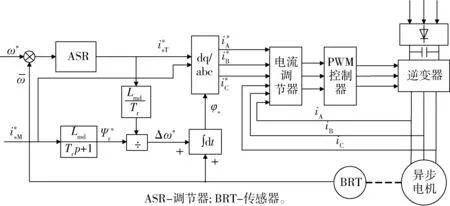
圖4 驅動電機控制結構和控制策略
φs=∫(Δω*+ωr)dt。
式中:Tr=Lr/Rr,為轉子電路的時間常數。
4 試驗與應用
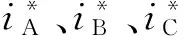
根據以上方案設計,筆者課題組研制了全方位移動平臺樣機,如圖5所示,該平臺及驅動電機參數如表1所示。

圖5 全方位移動平臺樣機
利用該樣機對平臺的全方位移動功能進行試驗驗證,試驗時路面環境為堅硬平坦的瀝青路面,利用運動控制軟件完成對平臺期望運動的設置,通過對陀螺儀(ADIS16355)的數據濾波得到樣機的姿態角速度,通過對加速度計(ADIS16355)的數據濾波并積分得到樣機的橫、縱向速度,將試驗結果經無線串口通信模塊(FC-211AP)發送至PC機并進行保存。
表1 全方位移動平臺及驅動電機參數
圖6、7分別為平臺橫向運動期望速度vx=0.1sin(πt/10)和縱向運動期望速度vy=0.1sin(πt/10)與實際速度的試驗對比曲線,每項試驗做3組,對各組試驗數據進行均值處理后得到平臺的速度數據。圖8為平臺中心轉向試驗時的平臺角速度變化曲線,期望角速度為ωz=2°/s。由以上試驗結果可以看出:所研制的平臺能夠很好地實現預期的全方位移動功能。
通過對平臺的拓展設計,該種全方位移動平臺技術得到了很好的實際應用,圖9為部分實際應用產品,分別為全方位移動叉車和升高機。
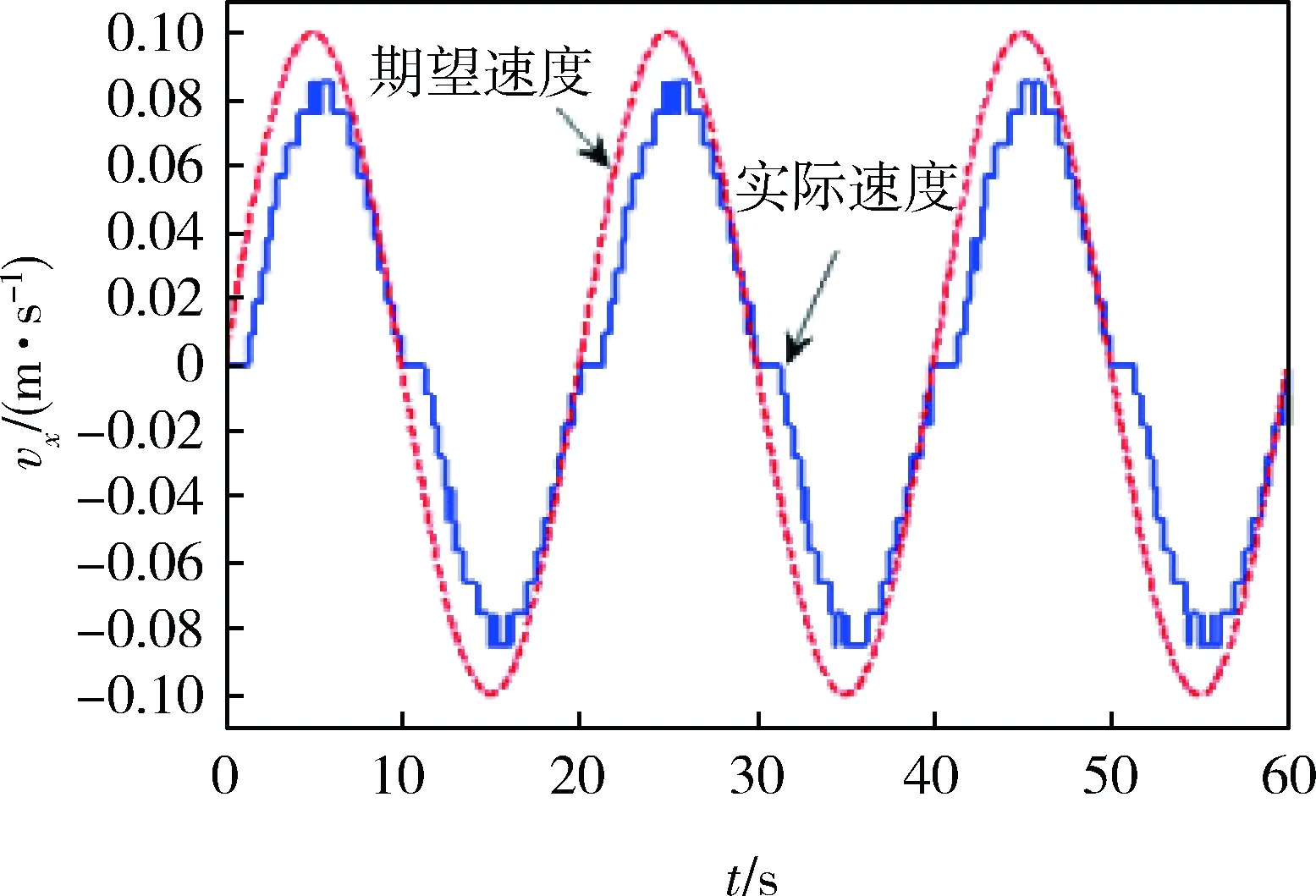
圖6 平臺橫向運動期望速度與實際速度試驗對比曲線
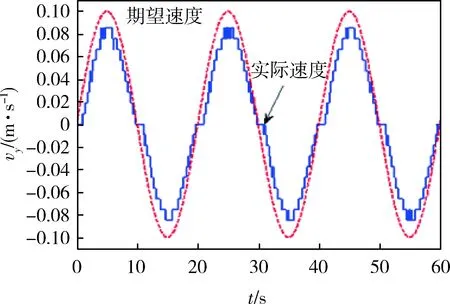
圖7 平臺縱向運動期望速度與實際速度試驗對比曲線

圖8 平臺中心轉向試驗時的平臺角速度變化曲線
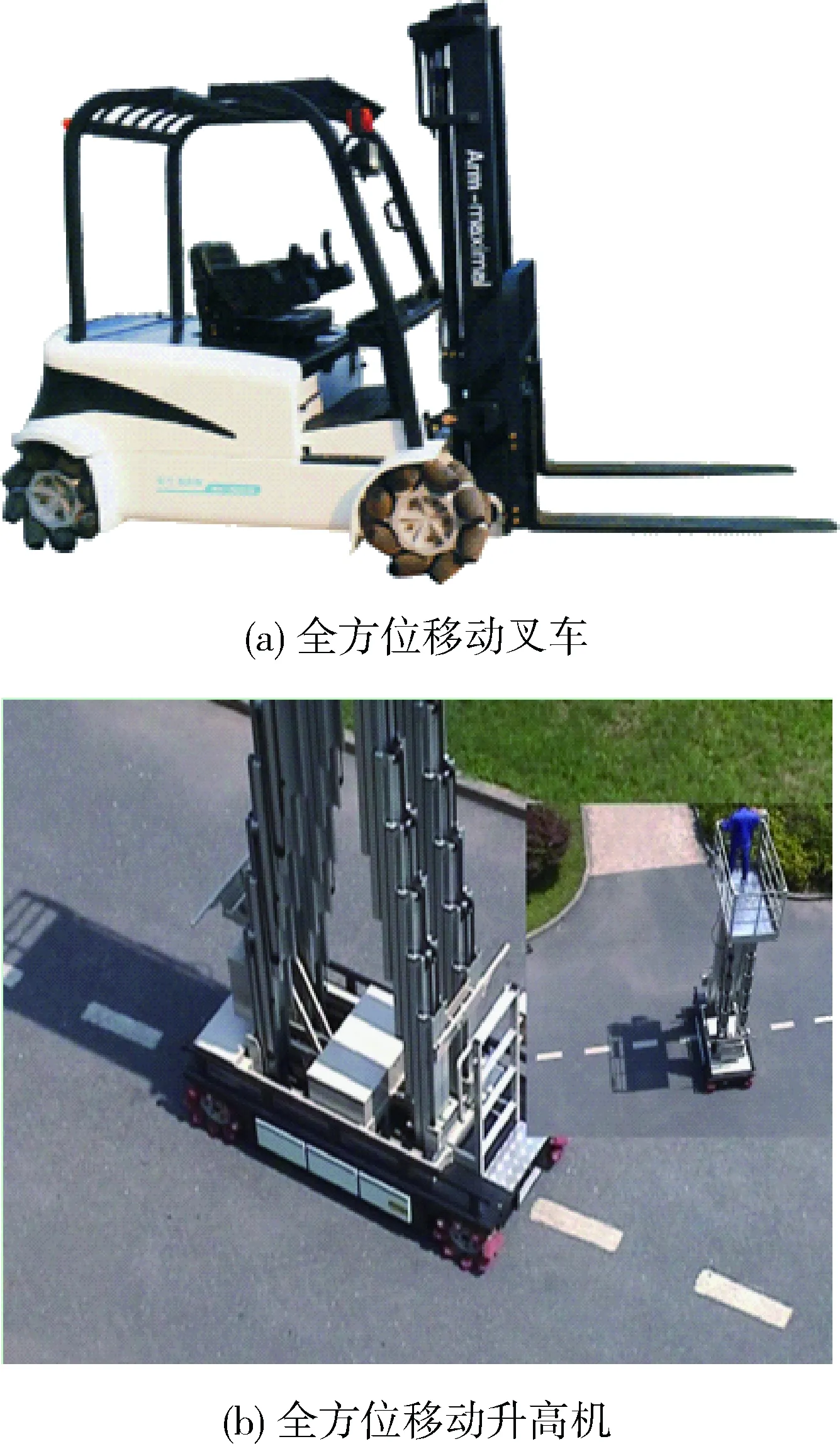
圖9 全方位移動平臺實際應用產品
5 結論
本文研究成果在全方位移動平臺技術領域打破了國內僅限于小機器人的研究現狀,達到了國外相關領域的技術水平。通過拓展研究,形成了一系列的應用平臺,不僅可以滿足陸軍船艇和通用裝備保障搬運的要求,也可應用于軍艦、洞庫等狹窄空間的物資和彈藥的運輸、裝卸上;在物資運輸、搬運、航天、掛裝、定位、無人地面車輛、偵察和維修等平臺上,也同樣具有重要的意義。
本文研究的全方位移動平臺是基于輪式載體,這對地面條件和全方位輪的設計提出了較高的要求,由于全方位輪自身的結構特點,導致輪式全方位移動平臺高速運行時會產生振動,影響平臺的平穩性。下一步將進行履帶式全方位移動平臺研究,以彌補這些不足,并將大大提升平臺的越野性能。
[1] McGowen H. Navy Omni-Directional Vehicle (ODV) Development: Where the Rubber Meets the Deck [J]. Naval Engineers Journal, 2000, 112(4): 217-228.
[2] 夏國慶. Mecanum輪全向移動機器人研制[D].南京: 東南大學,2010.
[3] 石維亮,王興松,賈茜. 基于Mecanum輪的全向移動機器人的研制[J].機械工程師, 2007(9):18-21.
[4] Campion G, Bastin G, D’Andrea-Novel B. Structural Properties and Classification of Kinematic and Dynamic Models of Wheeled Mobile Robots [J]. IEEE Transactions on Robotics and Automation,1996, 12(1):47-62.
[5] 王雙雙. 全方位移動平臺運動仿真與控制研究[D].北京:裝甲兵工程學院, 2012.
[6] 趙冬斌,易建強,鄧旭玥. 全方位移動機器人結構和運動分析[J]. 機器人, 2003, 25(5):394-398.
[7] 賈巨民,劉寶波,許愛芬,等. 螺旋式滾輪設計原理[J]. 機械科學與技術, 2001, 20(1):17-19.
[8] 呂偉文. 全方位輪移動機構的結構設計[J]. 機械與電子, 2006(12):63-65.
[9] 王一治, 常德功. Mecanum輪全方位運動系統的約束條件及奇異位形[J]. 上海大學學報:自然科學版, 2009, 15(2):181-185.
[10] 冷春濤, 曹其新. 四輪全方位移動機器人各向相異性研究[J].智能系統學報, 2007, 2(3):45-51.
(責任編輯:尚彩娟)
An Omni-directional Mobile Platform Based on Electric Drive Technology
YAN Nan-ming, ZHANG Yu-nan, WANG Shuang-shuang, ZHANG Jian
(Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
Based on four-wheel independent electric drive technology, network control technology and omni-directional wheel technology, a mobile platform which can realize omni-directional mobile function without changing its attitude is designed, and the construction, layout and drive control technology of omni-drerection wheel are also expounded. Experiment and application results show that the omni-directional mobile function of the platform can solve the problems of material handling in limited space, and fast, accurate positioning and docking.
omni-directional wheel; electric drive; omni-directional mobile platform
1672-1497(2015)03-0081-04
2015-01-28
軍隊科研計劃項目
顏南明(1975-),男,講師,博士。
TJ81+0.323
A
10.3969/j.issn.1672-1497.2015.03.016
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
哲學評論(2021年2期)2021-08-22 01:53:34
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50