活性污泥方法中曝氣過程控制的仿人智能策略
2015-06-15 18:59:43肖前軍
自動化儀表 2015年4期
肖前軍 黃 戎
(重慶工業職業技術學院自動化學院,重慶 401120)
活性污泥方法中曝氣過程控制的仿人智能策略
肖前軍 黃 戎
(重慶工業職業技術學院自動化學院,重慶 401120)
曝氣是污水生化處理的最重要環節,針對污水組份不確定性導致的控制難題,探討了曝氣過程控制的仿人智能策略。剖析了被控過程的控制難點,論述了曝氣過程的控制論特性,對控制策略作了對比研究,構造了基于仿人智能的工程控制算法。以具有滯后的慣性過程模型為例,仿真相應的對比研究驗證了仿人智能策略在上升時間、調整時間、是否超調與穩態控制精度等方面的良好控制品質。仿真研究結果表明,提出的仿人智能控制策略是可行與有效的。
活性污泥法 曝氣過程控制 仿人智能策略 生物降解 水質凈化 生化反應
0 引言
曝氣是污水生化處理階段中最重要的環節。首先,曝氣是發生化學反應的過程,產生空氣氧化水,將曝氣池中的亞鐵、錳等進行分離并沉淀。其次,在曝氣過程中,在曝氣池維持一定污泥濃度條件下,由于嗜氧菌在水中生存需要氧氣,曝氣可為大量的嗜氧微生物生長提供良好的生存環境,使池中嗜氧菌將污水中有機污染物進行降解。在污水凈化處理過程中,曝氣的目的就是連續不斷地曝氣充氧,提高水中溶解氧的含量,從而提高嗜氧菌的活性,使有機污染物質在生物化學作用下逐步降解,因此曝氣就是為有機污染物降解創造條件。實質上污水處理就是將進入曝氣池體中的污水在有氧的環境中,與池中微生物形成微生物的生物圈,利用微生物對池體污水進行生物降解凈化,實現對水體的凈化和水質的改善提高。
1 污水處理過程控制難點
污水處理的技術關鍵之一在于對生化反應復雜過程的控制,即對曝氣過程充氧的優化控制。曝氣充氧量與生化反應過程直接相關,衡量污水污染程度的三個重要技術指標分別是溶解氧(dissolved oxygen,DO)、生化需氧量(biochemical oxygen demand,BOD)和化學需氧量(chemical oxygen demand,COD)。DO是指溶解在水里的氧的數量,以每升水中包含氧氣的毫克數表示。該指標是研究水體自凈能力的依據。在生化反應過程中,當污水中有機物質氧化分解為氣體或無機物質時,促進生物降解過程的嗜氧菌需要消耗溶解氧。當水中DO值降到5 mg/L以下時,如不及時補充溶解氧,魚類呼吸就會發生困難,水體中厭氧菌將會很快繁殖,導致有機物腐爛,引起水體變黑發臭。在有機物分解過程中,BOD是指所消耗的溶解氧總數量,該指標用于衡量水體的污染程度,低BOD值表示水體污染程度低;相反,如果BOD值愈大,那么它表明水體的污染程度已經很高。COD反映水體受還原性物質污染的程度,其單位為mg/L。水體中存在的還原性物質少,則水質污染程度輕;相反,其值越高說明其污染越嚴重。國家標準規定:工業廢水排放COD最高容許濃度應小于100 mg/L,如造紙等特殊行業,其COD濃度應小于500 mg/L;對BOD的規定是水體最高容許濃度為60 mg/L,地面水不得超過4 mg/L。實際工程中,由于對BOD和COD值進行精確測量比較困難,鑒于活性污泥法是嗜氧過程,可借助DO參數間接地反映COD指標。DO與COD相關性研究已經證實了它的可用性,因此控制中一般選擇DO作為控制參數。
曝氣是促進生物化學反應的復雜過程,不確定性與復雜性是該過程的顯著特征[1-6],從控制論角度剖析曝氣過程,其控制難題源于曝氣過程的控制論特性。由于受不確定性與復雜性的影響,曝氣過程是難以進行數學建模與采用嚴格數學方法進行定量描述的,它具有以下控制論特性。
① 曝氣生化反應過程的“過程參數”只是特定環境條件下的一個估計值,條件不同,“過程參數”就不同,實質上意味著“過程參數”具有未知性。“過程參數”表現出的分散性、隨機性與時變性就是由過程的復雜性與不確定性導致的。
② 曝氣量多少與污水曝氣池容積以及污水在曝氣池的溫度與運動速度等諸多因素相關。曝氣過程是一個具有慣性的時滯過程,其過程時間時滯是時變與未知的,它導致整個曝氣過程的污水參數具有時變性與未知性。
③ 一般化學反應過程存在嚴格的定量關系,各個要素之間的關系是確定的,相互獨立的。曝氣生化降解的生化反應過程具有不確定性,各個要素之間呈現出強關聯性,其關系是非線性的,而且相互之間存在制約關系。
④ 生物化學反應過程受環境因素影響大,環境氣氛直接影響化學反應的降解,比如不同季節的溫度就具有隨機性、未知性與多樣性,這種環境干擾影響是難以預測的。
上述特性表明,曝氣過程的優化控制并非易事,由于不確定性導致難以進行數學建模,不可能采用范式控制策略對其實施精確的定量控制。以下從控制論角度對曝氣過程的控制策略作些討論。
2 曝氣過程的控制策略
針對曝氣過程的控制論特性,如不確定性、高度非線性、非結構化特性與復雜性以及過程參數的時變性和時滯特性等,可供選擇的控制策略并不多。如基于傳統控制理論(PID)與近代控制理論的控制策略,其控制器分析與設計的基礎是曝氣過程的精確數學模型,曝氣過程難以進行數學建模,因此采用該控制策略實施控制的效果是不可能令人滿意的。神經網絡控制要求對神經網絡模型的權值進行訓練與學習,但因不確定性所致,其試驗樣本很難從事先試驗和已知經驗中獲得。因方法的局限性,該控制策略對曝氣過程并非是有效的控制策略。基于知識的專家控制系統盡管可處理精確、模糊與定性、定量的信息,但在完備知識庫建立與特征信息采集以及特征信息表達等方面,因曝氣過程的不確定性,使其變得更加難以實現,所以,專家系統控制未必是好的選擇。模糊控制技術可借助模糊語言描述操作者的控制經驗,基于模糊集合理論對曝氣過程進行描述與刻畫,總結歸納出控制規則,實現對被控過程的控制。但是曝氣過程的不確定性與復雜性致使其隸屬函數難于確定,從而導致模糊規則無章可循。因此,采用模糊控制策略是難以對曝氣過程實施優化控制的。正是上述原因導致至今曝氣過程仍然采用以人工控制為主的控制方式。
隨著人工智能和自動控制理論的發展,智能控制策略給曝氣過程控制提供了新的控制思路。智能控制策略是一種無須人工干預的自動控制策略,在實施控制過程中,在過程動態特性變化范圍內,其智能控制器可自主地驅動控制過程,達到被控過程期望的控制目標[7-8]。基于人類智能的仿人智能控制器(human simulated intelligent controller,HSIC)就是模擬人類控制行為的控制器。曝氣過程控制中,DO控制參數可通過物理檢測手段獲取,因此誤差及誤差變化率等是可檢測的。據此可對曝氣過程中反映DO控制參數變化的動態特性進行在線特征記憶和特征辨識,按照前一個控制周期的誤差特征模式確定下一個控制周期的控制模式。控制模式確定了,控制算法就確定了。值得注意的是:由于該控制策略采用產生式規則描述推理與控制行為,可方便地基于知識的廣義控制模型設計控制器,因此可以方便地將操作者的控制經驗、智慧與技巧以及控制專家的知識融入控制算法中,以提高控制器的控制品質,特別是增強控制器的魯棒性能。因此,文中對曝氣過程的控制選取基于仿人智能的控制策略。
3 控制算法及其試驗仿真分析
3.1 控制算法
圖1所示為基于仿人智能的廣義知識控制模型。

圖1 控制模型


(1)
該原型控制算法實質上實施的是雙模態控制。在實施控制的過程中,下個控制周期的控制模式與控制算法由當前控制周期的誤差特征模式和控制算法決定。原型控制算法可方便地借助條件語句實現,除采用基本控制模式外,其優勢在于可再融入其他的控制策略。比如在曝氣過程控制中,可將實際控制經驗與控制智慧以及專家知識等嵌入到原型基本算法中,以取得更優秀的控制品質。這是其他控制策略所不及的。針對曝氣過程控制,仿人智能的控制器設計可采用表1的改進算法。
廣東省抽取的2批蒸五味子和內蒙古自治區抽取的1批制五味子樣品,其藥品名稱雖然收載于抽樣地所在省中藥飲片炮制規范,但無檢驗項目。
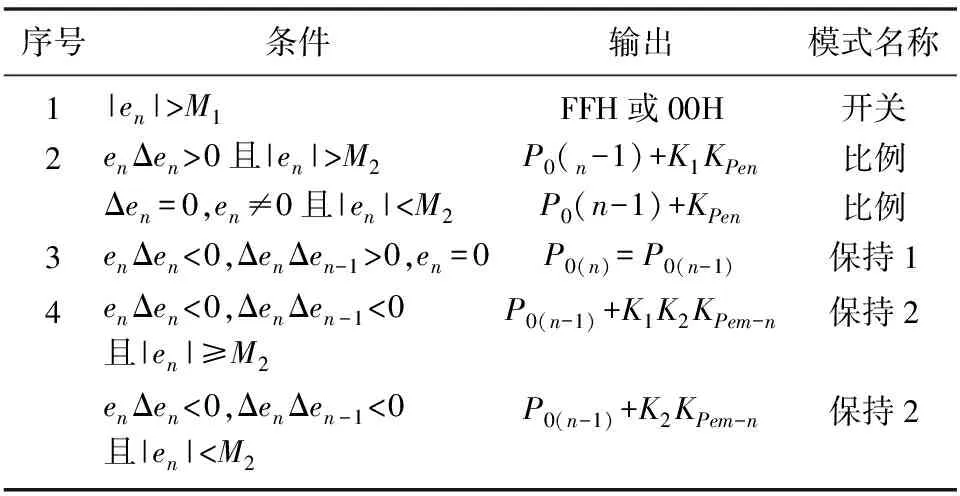
表1 控制算法規則
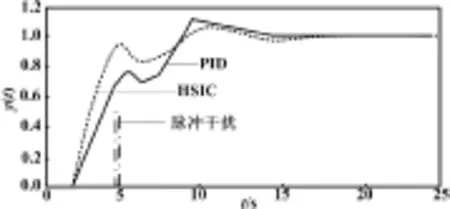
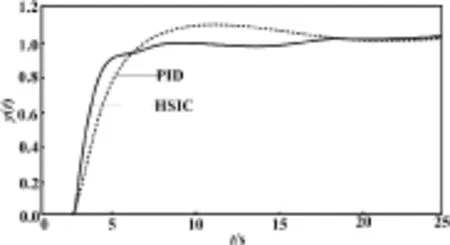
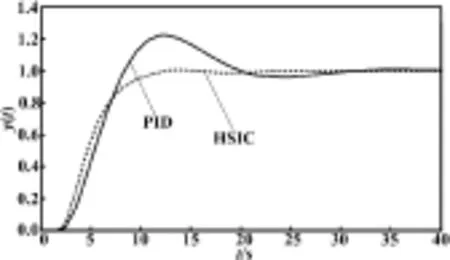
表1中,PO(n-1)、PO(n)分別表示第(n-1)個控制周期控制器輸出量P需要保持的值和控制器輸出量P第n次需要保持的值。em,n、K1分別為曝氣過程誤差的第n個極值與比例系數,K1>1。M1、M2為誤差閾值,并且滿足M1>M2。K2是一個抑制系數,并且滿足0 3.2 試驗仿真及其分析 針對曝氣過程的不確定性與復雜性,考察控制策略的控制性能,實質上就是考察該控制策略的魯棒性能。魯棒性強的控制器有很強的自適應性,如過程跟蹤控制,強魯棒控制器的跟蹤性能很少受內部控制參數變化和外部干擾的影響。對恒值控制系統而言,內部控制參數變化和外部干擾也幾乎同樣不影響其控制品質。以下從魯棒性角度,用試驗仿真驗證基于仿人智能的控制策略的強魯棒性能。由于曝氣過程是慣性時滯過程,可借助一階慣性環節加時滯環節對曝氣過程進行描述。在過程結構階次、控制參數大范圍變化以及施加外部干擾時,考察曝氣過程對不同控制策略的過程響應特性。其中,調節時間短、響應時間快、不存在超調或者超調小、穩態控制精確度高的控制策略因其強魯棒性就是可取的。為了直觀比較控制效果,仿真試驗中,以PID控制策略為參照,將HSIC仿人智能控制的過程響應與PID控制的響應過程進行比較。選取過程模型為: W(s)=Ke-τs/(Ts+1) (2) 式中:K為比例系數;τ為純滯后時間,單位s;T為曝氣過程時間常數,單位s。 取K=1,T=1.2s,τ=2s,因此,過程模型為W(s)=e-2s/(1.2 s+1)。 基于Matlab環境,借助Simulink搭建仿真模型,在單位階躍輸入信號作用下,分別采用PID和HSIC控制同一過程,其過程響應如圖2所示。圖3是在t=4.5s時對過程施加一個幅度為0.5、寬度為2s的脈沖干擾的響應曲線。 圖2和圖3中,曲線1和曲線2分別為PID和HSIC控制時的過程響應曲線。分析圖2可知,盡管PID與HSIC控制都不存在超調,但PID響應上升時間和調整時間不及HSIC控制時間快,HSIC控制明顯優于PID的控制品質。比較圖3響應曲線1和曲線2可知,HSIC控制具有較好的抗干擾性。 圖2 過程響應曲線 圖3 脈沖干擾的過程響應曲線 原過程控制參數分別為:K=1,T=1.2 s,τ=2 s,現在分以下情況對控制參數進行改變。 ① 如果K由1變到2,其他控制參數均不變,在同樣輸入條件下,其過程響應曲線如圖4所示。對比分析響應曲線可以看出,當比例系數改變后,HSIC控制仍保持無超調狀態,而PID控制出現大幅度超調,而且過程產生振蕩。 圖4 改變K的過程響應曲線 ② 如果T由1.2 s變到2 s,其他控制參數均不變,在同樣輸入條件下,過程響應曲線如圖5所示。分析PID和HSIC控制的過程響應曲線不難發現,采用HSIC控制時,其過程響應很少變化,但是采用PID控制時,過程響應的超調略有增大。 圖5 改變T的過程響應曲線 ③ 如果控制參數τ由2 s變到4 s,其他控制參數均不變,在同樣輸入條件下,過程響應曲線如圖6所示。 圖6 改變τ的過程響應曲線 比較分析過程響應曲線可以看出,HSIC控制響應曲線幾乎沒有發生變化,盡管也出現小幅度的波動,但對控制品質并沒有多大影響,僅僅是在響應時間上推遲了2 s而已。但PID控制出現大幅度超調,而且產生大幅度振蕩。 ④ 在被控過程控制參數不變的情況下,給其增加一個慣性環節1/(2s+1),即將原被控過程模型由一階變為二階過程W(s)=e-2s/[(1.2s+1)(2s+1)],其控制的過程響應曲線如圖7所示。由過程響應曲線分析對比可以看出,HSIC控制無超調量出現,其響應曲線幾乎沒有發生變化,但是PID控制出現大幅度的超調。 圖7 二階過程響應曲線 由上述分析可知,當過程有外部干擾時,HSIC控制比PID控制有更強的抗干擾性能;當過程控制參數發生變化,即使過程的階次發生變化由一階變為二階過程時,HSIC控制比PID控制均具有更高的控制品質。仿真試驗表明,基于仿人智能的控制策略在調節時間、響應時間、不存在超調或者超調小以及穩態控制精度等方面有獨特的控制優勢。 曝氣是一個具有不確定性的復雜控制過程,本文針對不確定性復雜過程的控制論特性,探討了活性污泥法曝氣過程控制中基于仿人智能的控制策略。仿真試驗驗證了該控制策略的強魯棒性,可在容許指標范圍內控制DO濃度,從而確保污水處理的出水水質達標。仿真結果表明了仿人智能控制策略的可行性與有效性。 [1] 彭莉,林鷹,楊奕.復雜系統控制中的相關技術討論[J].西南師范大學學報,2004,29(6):1066-1068. [2] Cai Zixing,Zhou Xiang,Li Meiyi.A novel intelligent control method evolutionary control[C]//Proceedings of the 3rd World Congress on Intelligent Control and Automation,2000:387-390. [3] 李太福,馮國良,鐘秉翔,等.一類不確定性復雜系統的控制策略分析[J].重慶大學學報:自然科學版,2003,26(1):4-7. [4] 楊志,李太福,盛朝強.基于仿人智能的復雜關聯系統控制[J].重慶大學學報:自然科學版,2002,25(7):9-11. [5] 孫小方,蔡亦軍,潘海天,等.大時滯過程自適應智能模糊Smith控制研究[J].工業儀表與自動化裝置,2008(5):6-9. [6] Punal A,Rocca E.An expert system for monitoring and diagnosis of anaerobic wastewater treatment plants[J].Water Research,2002(16):2656-2666. [7] 王耀南,孫煒.智能控制理論及應用[M].北京:機械工業出版社,2008. [8] 李士勇.模糊控制·神經控制和智能控制論[M].哈爾濱:哈爾濱工業大學出版社,2003. [9] 李祖樞,涂亞慶.仿人智能控制[M].北京:國防工業出版社,2003. [10]楊飚,張曾科.仿人智能控制器的動態特性參數整定方法[J].信息與控制,2004,33(6):670-673. [11]熊仁權,喬正洪.基于仿人智能的供水系統控制策略[J].四川兵工學報,2012,33(1):76-78. Human Simulated Intelligent Strategy of Aeration Process Control in Activated Sludge Method Aeration is the most important part of the biochemical sewage treatment. Aiming at the control difficulties caused by the uncertainty of sewage components, the human simulated intelligence strategy for aeration process control is investigated. The control difficulties of the controlled process are dissected, the cybernetics characteristics of aeration process are expounded, the control strategies are compared and studied, and the engineering control algorithm based on human simulated intelligence is constructed. Taking the inertia process model with time lag as example, relevant comparison research is simulated, the good control quality in many aspects, e.g. rising time, adjusting time, whether overshoot or not, and static control accuracy, etc., of human simulated intelligent strategy is verified. Activated sludge method Aeration process control Human simulated intelligence strategy Biodegradation Water quality Biochemical reaction 肖前軍(1974-),男,2006年畢業于重慶郵電大學通信與信息系統專業,獲碩士學位,副教授;主要從事控制理論與嵌入式方面的教學與研究。 TP273 A 10.16086/j.cnki.issn1000-0380.201504018 修改稿收到日期:2014-09-09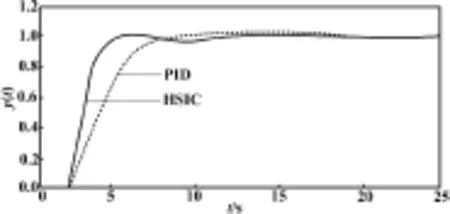

4 結束語
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
表面工程與再制造(2019年6期)2019-08-24 06:40:04
山東冶金(2019年3期)2019-07-10 00:54:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26