機載紅外搜索跟蹤系統探測性能評測標定*
2015-06-21 12:39:37王領于雷寇添王海晏空軍工程大學航空航天工程學院陜西西安710038
國防科技大學學報 2015年5期
王領,于雷,寇添,王海晏(空軍工程大學航空航天工程學院,陜西西安710038)
機載紅外搜索跟蹤系統探測性能評測標定*
王領,于雷,寇添,王海晏
(空軍工程大學航空航天工程學院,陜西西安710038)
針對機載紅外搜索跟蹤系統(Infrared Search and Track,IRST)理論與實際戰場探測能力之間的較大差異,提出了IRST系統探測性能評定的方法。對機載紅外探測系統探測性能指標進行理論分析,選取探測點源目標的噪聲等效輻照度作用距離模型進行分析改進;探討作用距離與探測概率之間的關系;根據IRST系統工作方式,推導出系統物理掃描概率和目標發現概率計算公式;分析目標發現概率與系統作用距離以及載機速度之間的關系;搭建雙余度反饋IRST系統探測概率測試平臺,制定實驗評測步驟,提出一種對探測系統性能進行評估的方法,該方法簡單可靠。仿真實驗結果表明,滿足一定的探測概率下,系統作用距離極限可達到60km;通過半實物仿真平臺的測試,實驗結果較好地驗證了所建模型的合理性。
紅外輻射;作用距離;探測概率;最大似然估計;評估標定
近年來,在高技術和新型軍事裝備支撐下的戰爭對軍事偵察與監視的能力和水平提出了越來越高的要求,而機載紅外搜索跟蹤系統(Infrared Search and Track,IRST)在基于光電探測的先進航空裝備平臺上占據著主體地位[1-2]。機載IRST系統具有分辨率高、探測距離遠、全天候和抗干擾等諸多優勢,這使得各軍事強國致力于競相研制新型紅外搜索跟蹤系統。
研制過程中,為保證武器裝備能夠滿足作戰能力要求,武器裝備的試驗和評估是研制的關鍵環節,也是發現問題和消除風險的有效手段[3]。因此,本文針對機載IRST系統的探測性能評測問題,在深入分析IRST系統關鍵戰術指標上,主要從紅外輻射作用距離建模出發,把系統的探測能力標定問題歸結為探測概率的研究,最后通過實驗設定,給出作戰環境下探測概率標定指標,從而更加合理地對新研IRST系統探測性能做出評定。
1 紅外輻射作用距離分析
機載IRST系統探測性能中,作用距離是一項最為關鍵的戰術指標,因而對IRST系統作用距離的分析是必不可少的環節,同時也為IRST系統探測性能的評定提供重要依據。國內外文獻[4]~[10]對紅外探測設備的作用距離模型都做了深入的研究和改進,按探測目標可分為點源目標和擴展源目標探測模型;按探測過程可分為水平探測和斜程探測模型;按探測原理可分為噪聲等效溫差模型、噪聲等效輻照度(Noise Equivalent Flux Density,NEFD)模型、最小可探測溫差模型[11]、對比度模型、光譜響應模型等。機載IRST系統在實戰中最為有意義的是遠距斜程探測,被探測對象在系統視場中一般為點源目標,而NEFD模型對實戰環境點源目標作用距離工程估算更為準確,但其一般都是在靜態環境下的理想估算,忽略一些重要戰場環境因素。因此本文在NEFD模型上作進一步改進,改進模型融合了斜程探測因素,考慮了背景噪聲和目標在探測器面上彌散斑的影響,這為模擬真實戰場環境和在實驗室進行試驗提供了一定的理論支撐。
若在只有環境背景輻射的情況下,則探測器響應的瞬時電壓為V1;在遠距離情況下,目標并未完全充滿探測器視場,目標某一波段的輻射強度在探測器上引起的瞬時電壓為V2。再根據輻照度和輻射功率計算公式推導出相鄰探測器電壓差值為:
式中:It為目標輻射強度;Ib為背景輻射強度;δ為信號衰減因子;τ0為光學系統透過率;τ(R)為大氣斜程透過率;A0為入瞳面積;R為紅外作用距離;k為彌散系數,k=/σ2,為目標尺寸對探測器面張角的方差值;σ2為實際像點彌散斑對系統張角的最大方差值;R 為電壓響應度,R= ()/,Vn為噪聲電壓,D*為比探測率,Ad為探測器光敏面積,Δf為測量電路的頻帶寬。
由式(1)可推導出IRST系統斜程探測作用距離表達式為:
基于NEFD模型的作用距離簡潔,更有利于工程估算,它與基于信噪比作用距離模型沒有本質區別。式中τ(R)=exp[-μˉ·是作用距離的隱函數,需要迭代求解,ˉμ為大氣斜程平均衰減系數,其值跟大氣能見距RV和輻射波段有關,Δh表示戰機與目標的高度差,α為目標在戰機方向的俯仰角。圖1是根據我國冬夏季節不同的大氣衰減系數,輻射波段為3~5μm,空氣能見距為5km時的近地大氣斜程透過率。圖1(a)和圖1(b)分別是冬季和夏季大氣透過率變化曲線。
從圖1可以看出,紅外輻射在大氣中的透過率隨季節的變化而變化,總體上來講,我國夏季的大氣透射率相對低于冬季,這是因為夏季大氣變化多端,常伴有雨、霧、多云天氣,透射率受天氣影響較大。圖中紅外輻射透射率隨紅外探測器與目標之間高度差Δh的增大而減小;當高度差Δh大于20km時,透射率隨高度差的變化趨于平緩。
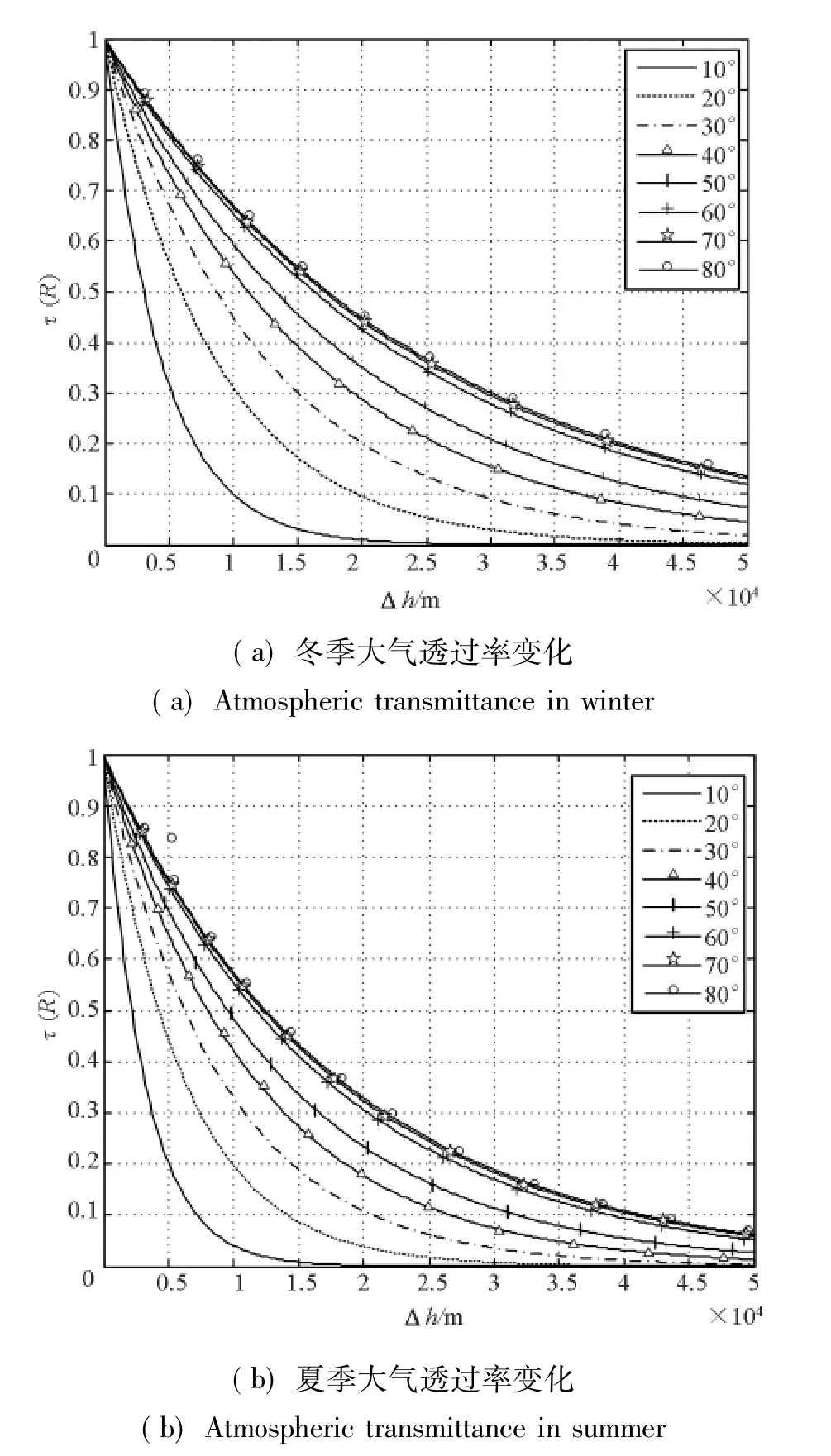
圖1 不同高度差和目標仰角下的大氣透過率Fig.1 Atmospheric transmittance under different heights and elevations of target
2 探測概率模型
作用距離與探測概率、虛警率之間不是獨立關系,作用距離存在一定的概率,虛警率也會隨著作用距離的變化而變化[12]。上面討論了IRST系統作用距離戰術指標,這一指標在戰場環境下發揮的可靠性有多大,能否根據其指標順利完成戰術任務,如何熟練掌握新研IRST系統在這一指標下的實戰性能,就需要結合這一指標對探測概率進行深入討論。IRST系統的工作過程如圖2所示。
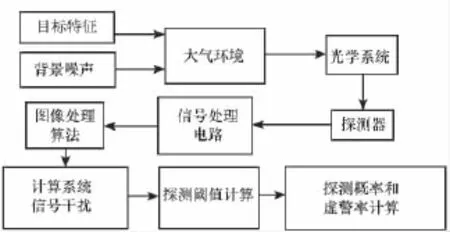
圖2 IRST系統的工作過程Fig.2 Working process of IRST system
遠距目標和背景輻射信息經過大氣傳輸,進入IRST光學系統成像在探測器面上,信號經過電路濾波和有用信號提取處理后,圖像處理器進行閾值選取與目標識別,最后由系統完成概率檢測計算,并決定是否給出告警。從IRST系統工作過程可以知道,設備探測概率可分為物理掃描概率Pd和目標發現概率Pr兩環節,即IRST系統探測目標概率P=Pd×Pr。為了評定IRST系統作用距離的可靠性,下面主要根據以上所述的兩個環節對IRST系統的探測概率進行分析。
2.1 物理掃描概率計算
物理掃描概率是指當IRST系統處于連續工作狀態時,其光學視軸按照一定的規律在一定的空域范圍進行機械掃描,目標出現在IRST紅外系統視場時的概率,它主要與光學掃描方式以及掃描角速度有關[13]。系統物理掃描示意圖如圖3所示。
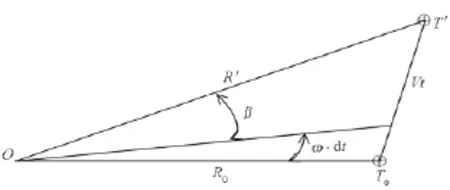
圖3 IRST系統物理掃描過程Fig.3 Physical scansion process of IRST system
假如探測設備位于圖中O處,距離其R0處的目標剛好被掃描到,經過微小段時間d t之后,目標離開光學掃描視場,又以速度V沿任意方向經過一小段時間t,到達T'處,轉過β角度,距離為R',則目標處在T'被掃描到的概率為:

T0處的目標經過微小段時間d t后所處的位置與O處的距離可近似看為R0,則根據圖中參數之間關系,由三角余弦函數公式可以得到:

對式(4)時間t微分,得V2t·d t=R0R'sinβ,考慮到一小段時間內β≈sinβ,因此目標瞬時被掃描到的概率密度函數為:

通過對式(5)進行積分和物理過程的推導,最終可以得到目標的物理掃描概率為:

式中,t0為掃描開始時間,T為掃描周期。
若探測距離R0=20km,目標速度為3Ma時,系統的物理掃描概率與掃描角速度和時間的關系如圖4所示。從圖中看出,物理掃描概率隨著時間的積累而迅速增大,在同一時間下,掃描角速度越大,物理掃描概率越高,但在25s之后,不同掃描角速度探測概率沒有明顯高低區別。
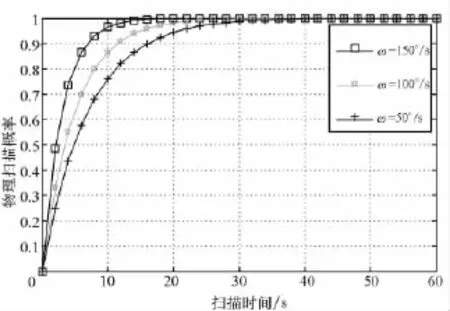
圖4 物理掃描概率隨時間和角速度的變化Fig.4 Physical scansion probability changing with scanning time and angular speed
2.2 目標發現概率計算
目標發現概率是指目標已經出現在系統視場中,通過IRST光學系統對紅外輻射信息快速處理后而被自動發現的概率。目標發現概率是從系統原理層次上進行分析的,它與作用距離、目標和背景輻射強度、目標速度、大氣透過率狀況、系統噪聲等多種因素有關。
目標被發現的具體過程一般是預先給系統設定一個與概率相關的閾值,當外界目標輻射強度所引起探測器靶面的電壓信號大于閾值時,并且經過圖像處理器處理后,若目標真實存在,則可認為目標被探測發現;若不是真目標,則是虛警[14]。由于整個探測發現過程隨時都會受到隨機噪聲的干擾,因此識別過程需要用識別概率、虛警率這樣的統計量來描述。系統中的隨機噪聲不隨外界特定信號的變化而變化,這種隨機噪聲電壓一般符合高斯分布,當外界目標和背景輻射信號進入系統之后,這種混合噪聲信號仍然服從高斯分布,其電壓信號均值為零,則IRST系統虛警概率為:
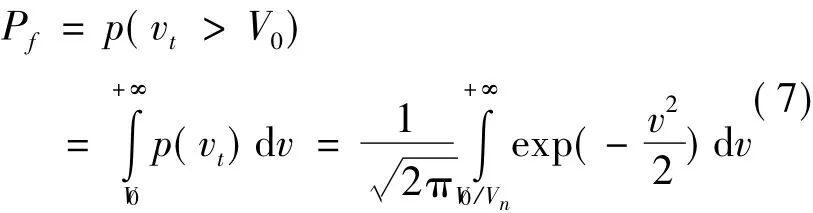
式中,V0為系統信號檢測閾值,TNR=V0/Vn為系統閾噪比。實際在對新研紅外設備的探測性能進行評估時,主要關注的是設備在一段時間內所引起的虛警次數,若信號的脈沖寬度為τd,則在單位時間t內所引起的虛警次數為平均虛警率[15]:

圖5是目標速度在5Ma下目標發現概率與作用距離間的關系,從圖中可以看出目標發現概率總體上隨著作用距離的增大而減小;在近距離情況下,目標發現概率相差不大,隨著距離增加,發現概率出現很快的下滑趨勢,直到70km以后幾乎不能發現目標;在20~60km之間,目標發現概率與大氣能見距RV密切相關,同一距離下,大氣能見距越低,目標發現概率較低;而這個范圍又處在戰機合適的作戰半徑內,因此大氣狀況的好壞直接影響到戰機作戰任務。
實際上,式(10)中It也是目標速度u的函數,目標速度越大,其蒙皮輻射強度越高,這致使目標某一輻射波段極易被探測,尤其是對高超音速目標探測時尤為明顯。
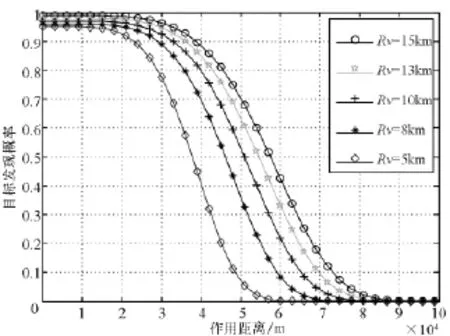
圖5 目標發現概率隨作用距離的變化Fig.5 Target recognition probability changing with operating range

圖6目標發現概率隨目標速度的變化Fig.6 Target recognition probability changing with target speed
圖6 反映的是目標發現概率在不同作用距離下隨目標速度馬赫數的變化,從圖中看出,目標發現概率隨著目標馬赫數的增加而增加,而且馬赫數越大,發現概率總體上變化越快,但在較近距離情況下,并沒有明顯地呈現出這樣的規律,這是因為較近距離下,機載IRST較容易發現超音速目標,因此其發現概率隨速度的變化較平緩。從圖6還可以看出,在目標馬赫數一定的情況下,距離越大,目標發現概率仍然越小,因為距離越遠,大氣透過率值越低,這極大地影響了機載IRST系統探測性能的發揮。
3 實驗與評測標定
3.1 實驗平臺搭建
以上從理論層面對IRST系統探測性能指標進行了分析,在實際作戰環境中,這些性能指標是否可靠,還需要通過設定實驗對IRST系統作進一步評估。在理論分析基礎上,按照實際需求,搭建實驗平臺,如圖7所示。
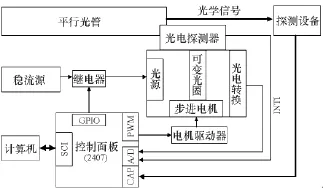
圖7 IRST系統探測概率測試平臺Fig.7 Test platform of IRST system detection probability
測試系統中,可控光源在控制模塊的控制下,按照一定的規律變化;平行光管可將點光源變為平行光,模擬無窮遠光源。從平行光管發出的光信號經雙余度反饋環,一路反饋是光電探測組件模塊所檢測到的光信號直接反饋給控制模塊,作為自閉環回路;另一路反饋則是被測的探測設備把接收到的光信號先轉換為電信號,再反饋給控制模塊,作為外閉環。控制模塊記錄下被測設備響應的次數Nr,然后通過設定的試驗次數N0和統計學中最大似然估計法計算其探測概率,再與理論探測概率相比較,如果實驗概率與理論概率的相對誤差在一定范圍內,則認為IRST系統探測性能穩定;如果實驗概率遠大于理論概率,則認為此IRST系統探測性能穩定可靠。實際上,實驗評定結果往往需要進行多組測試。
3.2 探測能力評定步驟
實驗室環境下模擬戰場環境中IRST系統作戰性能,需要實測數據計算每一個參數,利用上述實驗平臺,通過可控模擬目標源、雙余度反饋,保證測試結果的可靠性和準確性[16]。下面是對IRST系統探測能力評估的實驗步驟:
1)預先給出IRST系統最大作用距離Rmax、光學系統孔徑D、透過率τ0、測量電路頻帶寬Δf、工作環境等參數;
2)設定合適試驗次數N0,并確定實驗組數n、背景輻射強度Ib和目標輻射強度(It)i(i=1,2,3,…,n),再根據已知條件計算其他參數,如相應的探測概率p0,大氣透過率τ(R)等,并把這些參數輸入計算機;
3)利用IRST系統探測概率測試平臺先對最大作用距離進行測試,記錄每組實驗被測設備響應次數Nr,并根據統計學中最大似然估計法計算每組實驗探測概率pi,同時計算均值
4)利用得到的數據pi與p0作比較,如果/p0≤5%且≥85%,則IRST系統在Rmax下能穩定工作;如果p0且≥95%,則IRST系統在Rmax下工作穩定可靠;否則把Rmax減小5km為R1,重復步驟3),直到IRST系統在作用距離Rj=Rmax-5000j時,j=1,2,3,…,探測概率Pj符合步驟4)中假設要求為止,同時做出相應評定。
3.3 計算實例
假定所探測的目標為某高超音速飛行器,飛行高度為20km;被探測角度為側視45°。IRST系統Rmax=50km,掃描角速度為100°/s;光學系統孔徑D=0.5m,透過率τ0=0.75,像元尺寸為50μm,比探測率D*=2.0×1011cmHz-1/2W-1,系統測量電路頻帶寬Δf=5.0×103Hz,信號衰減因子δ=0.9;設定探測器閾噪比TNR=5。背景紅外輻射強度Ib=20W/Sr,大氣能見距RV=20km。
根據已知條件計算出Rmax下的探測概率p0=0.81,大氣透過率τ(R)=0.78,設定目標輻射強度(It)i=2.5×103-500i(W/Sr),并且把這些數據輸入計算機,從而使計算機調控光源,使平行光管能夠輸出模擬外界輻射強度的光源。設定試驗次數N0=30,實驗組數n=5。通過實驗,測得數據如表1所示。表1中探測概率pi是由統計學最大似然估計法計算所得。每組實驗數據可以看作是二點式分布,若用“1”表示有探測響應,“0”表示無探測響應,則母體X的分布為P{X==(1-p(x=0,1)。取得子樣記為(x1,,…,,則每組實驗概率為:
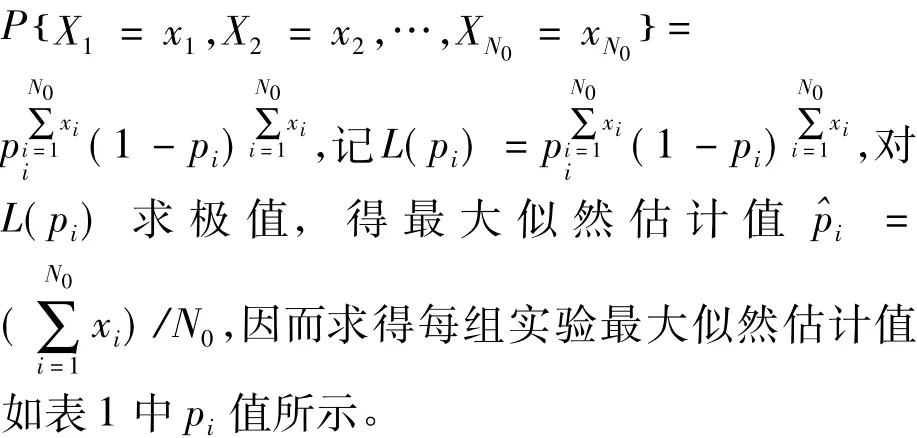
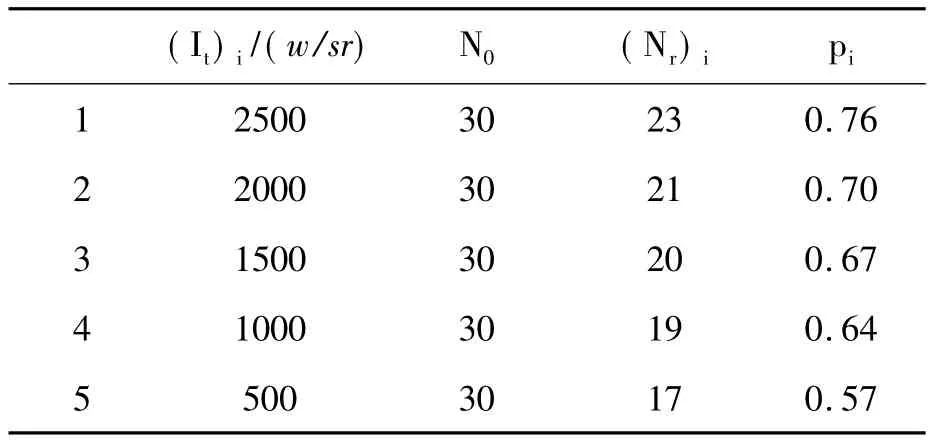
表1 探測概率實測數據Tab.1 Measured data of detection probability
由表1實驗數據求得pi=0.69,且pi-p0/ p0=14.8%≥5%,因此需要繼續測試=-5km=45km,測試步驟同上,實驗數據結果如表2所示。
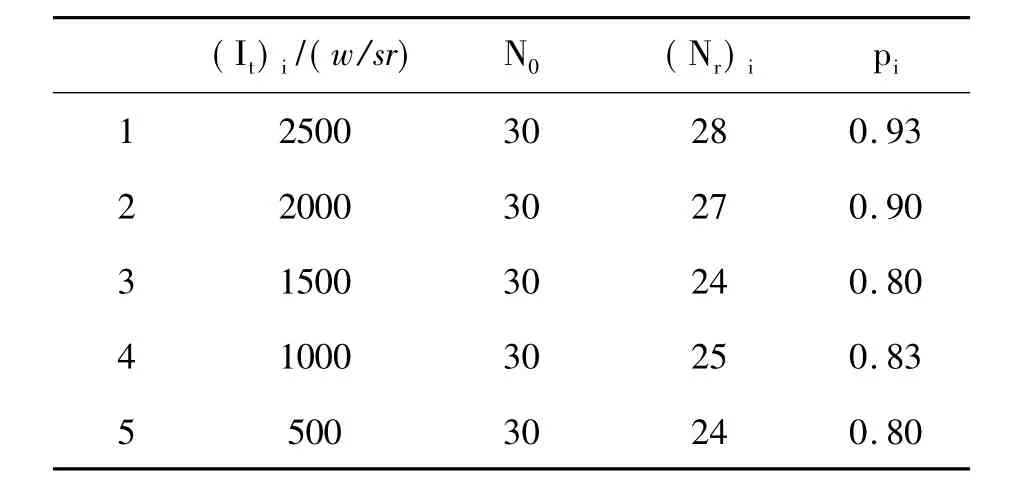
表2 探測概率實測數據Tab.2 Measured data of detection probability
由表2實驗數據求得pi=0.85,而R1對應的理論探測概率p0=0.84且pi-p0/p0=1.17%≤5%,pi≥85%,則IRST系統能夠穩定工作。從步驟3)繼續進行測試,可以發現,當R4=30km時,理論概率探測p0=0.89,由表3數據得到pi=0.96,有pi?p0且pi≥0.95,則IRST系統能夠在R4=30km下穩定可靠工作,擔負作戰任務。
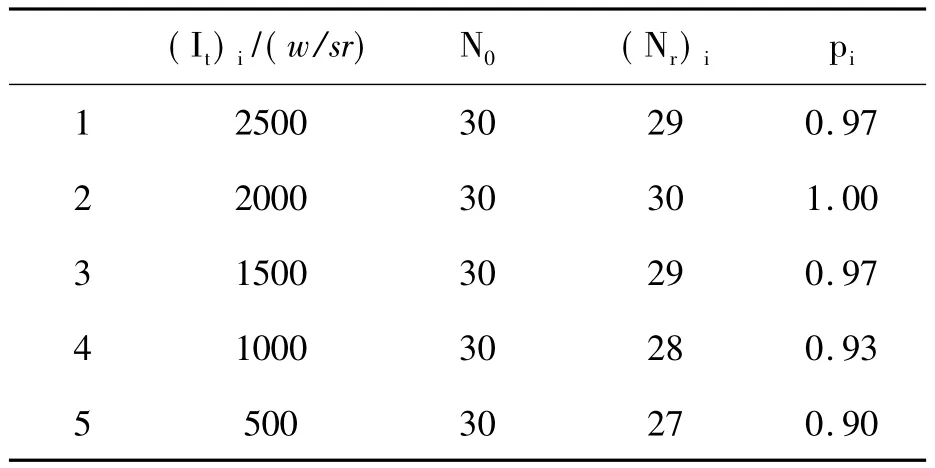
表3 探測概率實測數據Tab.3 Measured data of detection probability
從以上評測和標定實驗過程可以看出,實驗結論同時也驗證了本文所建模型的有效性,能夠利用理論模型對機載IRST探測系統進行探測性能評估預測。
4 結論
本文所研究內容對于光電探測設備的評估、改進和生產定型能夠提供一定的依據和參考價值。文中物理掃描概率和角速度之間的結論說明針對不同的掃描方式要選擇合適的掃描角速度,以期達到最大的物理掃描概率;目標發現概率與作用距離間的結論則表明戰機擔負作戰任務最好選擇大氣能見距高的時候;在靜默攻擊中,飛行員可在距離目標50km處開啟IRST前視紅外系統,關閉雷達系統,進行相對隱身的戰況決策。文中實驗評測結論是在實驗室環境下模擬戰場環境所獲得的,對于結論仍需要進一步完善實驗設定以及評估標準;當建立了動態測試環境之后,可以對機載IRST系統作戰性能進行動態測試,以提高對光電探測系統戰時能力評估預測的準確性;當獲得了大量外場測試實驗數據之后,結合實驗室模擬環境便可以對軟件測試設備進行完善,達到機載光電系統探測概率自動測試的效果。
References)
[1]丁全心,劉華.光電探測與制導技術在機載成像系統中的應用與展望[J].紅外與激光工程,2007,36(s2):7-14.DING Quanxin,LIU Hua.Perspective on photoelectric detection control and guide technique for airborne imaging systems[J].Infrared and Laser Engineering,2007,36(s2): 7-14.(in Chinese)
[2]陸君,呂彤光.光電探測技術在火控系統中的應用及發展[J].紅外與激光工程,2012,41(4):1047-1051.LU Jun,LYU Tongguang.Application and development of optoelectronic detection technology in fire control system[J].Infrared and Laser Engineering,2012,41(4):1047-1051.(in Chinese)
[3]劉義,趙春娜,王雪松,等.一種反輻射武器作戰效能評估方法[J].兵工學報,2011,32(3):321-326.LIU Yi,ZHAOChunna,WANG Xuesong,etal.Weapons and equipment development demonstration[J].Acta Armamentarii,2011,32(3):321-326.(in Chinese)
[4]金偉其,高紹姝,王吉暉,等.基于光電成像系統最小可分辨對比度的擴展源目標作用距離模型[J].光學學報,2009,29(6):1552-1557.JINWeiqi,GAO Shaoshu,WANG Jihui,et al.A model to predict range performance of imaging system for extended target based on minimum resolvable contrast[J].Acta Optic Sinica,2009,29(6):1552-1557.(in Chinese)
[5]Beier K,Gemperlein H.Simulation of infrared detection range at fog conditions for enhanced vision systems in civil aviation[J].Aerospace Science and Technology,2004,8(1):63-71.
[6]賈慶蓮,喬彥峰,鄧文淵.周視搜索系統對點目標的作用距離分析[J].光學學報,2009,29(4):937-943.JIA Qinglian,QIAO Yanfeng,DENGWenyuan.Analysis for point-target detection range of panoramic searching system[J].Acta Optic Sinica,2008,29(4):937-943.(in Chinese)
[7]Nijhawan O P.Range estimation of thermal imaging system from MRTD and MTFmeasurement[J].Optik(Jena),1994,97(1):1-3.
[8]張寶輝,張俊舉,常本康,等.紅外探測器對飛行彈丸探測距離的仿真研究[J].兵工學報,2012,33(11):1319-1323.ZHANG Baohui,ZHANG Junju,CHANG Benkang,et al.Simulation on detection range of infrared detector for flying projectile[J].Acta Armamentarii,2012,33(11):1319-1323.(in Chinese)
[9]何建偉,曹晨,張昭.紅外系統對隱身飛機的探測距離分析[J].激光與紅外,2013,43(11):1243-1247.HE Jianwei,CAO Chen,ZHANG Zhao.Analysis onoperating range of a IR system for stealth aircraft[J].Laser&Infrared,2013,43(11):1243-1247.(in Chinese)
[10]李力,裘溯,金偉其,等.基于最小可分辨對比度的近紅外距離選通成像系統作用距離模型[J].光學學報,2010,30(12):3481-3487.LILi,QIU Su,JINWeiqi,etal.Operating distancemodel of near-infrared range gated imaging system based on minimum resolvable contrast[J].Acta Optic Sinica,2010,30(12): 3481-3487.(in Chinese)
[11]趙妙娟,車宏.軍用光電系統作用距離分析[J].紅外與激光工程,2008,37(s2):501-503.ZHAO Miaojuan,CHE Hong.Analysis of the efficient distance of O-E system for military[J].Infrared and Laser Engineering,2008,37(s2):501-503.(in Chinese)
[12]毛峽,常樂,刁偉鶴.復雜背景下紅外點目標探測概率估算[J].北京航空航天大學學報,2011,37(11): 1429-1434.MAO Xia,CHANG Le,DIAO Weihe.Estimation for detection probability of infrared point target under complex backgrounds[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(11):1429-1434.(in Chinese)
[13]賈慶蓮,鄧文淵.紅外警戒系統的探測概率計算[J].紅外與激光工程,2011,40(10):1856-1861.JIA Qinglian,DENG Wenyuan.Detection probability calculation of infrared warning system[J].Infrared and Laser Engineering,2011,40(10):1856-1861.(in Chinese)
[14]李克新,張偉,叢明煜,等.一種深空背景空間小目標條痕檢測算法[J].光學學報,2010,30(2):445-450.LIKexin,ZHANGWei,CONGMingyu,etal.A streak detection algorithm of space target in deep space background[J].Acta Optic Sinica,2010,30(2):445-450.(in Chinese)
[15]李朝暉,王冰,陳明.基于小波多尺度和最大似然法的紅外目標探測[J].光學學報,2009,29(12):3404-3409.LI Chaohui,WANG Bing,CHEN Ming.Infrared target detection based on wavelet multi scale and maximum likelihood[J].Acta Optic Sinica,2009,29(12):3404-3409.(in Chinese)
[16]時成文,隋強強,石碧艷.一種新型光電設備響應時間與探測概率自動測試系統[J].光電技術應用,2008,23(1): 38-41.SHI Chengwen,SUI Qiangqiang,SHI Biyan.A new automatic test system of reaction time and detection probability for electro-optic equipments[J].Electro-Optic Technology Application,2008,23(1):38-41.(in Chinese)
Evaluation and calibration of operational capability to airborne IRST system
WANG Ling,YU Lei,KOU Tian,WANG Haiyan
(Aeronautics and Astronautics Engineering College,Air Force Engineering University,Xi’an 710038,China)
Due to the difference between theory detection and in-battlefield detection ability of airborne IRST(Infrared Search and Track) system,themethod of evaluation for detection system was put forward.Firstly,the theory aiming at operational capability of airborne infrared detection system was analyzed,especially the betterment of NEFD(Noise Equivalent Flux Density)operating range model,and the analysis of functional relationship between operating range and detection probability.According to the operation mode of IRST system,the computational formula of physical detection probability and target identification probability was deduced,and the target identification probability changing with operating range as well as speed was analyzed.Finally,the test platform of IRST system detection probability was set up and the experimental evaluation steps weremade,and a simple and reliablemethod of evaluation and calibration was proposed.Simulation resultshows that the operation range limitation of IRST system can reach 60km.Testing by semi-physical simulation,the rationality of themodel is verified through the experimental conclusion.
infrared radiation;operating range;detection probability;maximum likelihood estimation;evaluation and calibration
TN929
A
1001-2486(2015)05-192-07
10.11887/j.cn.201505030
http://journal.nudt.edu.cn
2014-11-25
國家自然科學基金資助項目(61172083)
王領(1987—),男,陜西西安人,博士研究生,E-mail:wangling0413@163.com;于雷(通信作者),男,教授,博士,博士生導師,E-mail:yl0303@sohu.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
發明與創新(2016年38期)2016-08-22 03:02:52
新農業(2016年18期)2016-08-16 03:28:27