智能輸液滴速調節系統
2015-06-22 15:09:17王中陶任天平辛冠希馮鵬飛
網絡安全與數據管理 2015年9期
王中陶,任天平,辛冠希,馮鵬飛
(鄭州大學機械工程學院,河南鄭州450001)
智能輸液滴速調節系統
王中陶,任天平,辛冠希,馮鵬飛
(鄭州大學機械工程學院,河南鄭州450001)
研制了一種智能輸液滴速調節系統。該系統以AVR單片機為核心,采用紅外對射的原理檢測茂菲管里是否有液滴滴落,同時采用蠕動泵為滴速調節機構。該系統可以通過按鍵設置藥液滴速并顯示實時滴速。另外該系統還能在異常情況和輸液完畢時進行聲光報警并自動關斷。測試結果表明,該系統可靠性高、成本低、安全衛生、操作方便,在傳統醫療中具有廣泛的市場價值和推廣性。
智能輸液;AVR單片機;蠕動泵;自動關斷
0 引言
靜脈輸液是一種重要的臨床藥物治療手段,是醫療監測的一個重要組成部分,被廣泛應用于醫療行業中[1]。據醫學研究得知,藥液速度對于不同年齡段的人、不同的病人、不同藥物具有很大的差異性。并且它對于治療效果具有很大的影響,有的甚至會影響患者的生命。傳統輸液速度的調節是通過一個斜槽機構,靠護士的經驗控制輸液速度,具有很大的不確定性。并且傳統輸液需要人為看護,這無疑增加了醫護人員的工作量和意外事件發生的可能性。基于以上情況,本文設計一套智能輸液滴速調節系統,該系統采用3D打印技術設計了機械安裝結構。該系統采用紅外對射原理檢測藥液滴速,利用AVR單片機控制蠕動泵人為地調節藥液滴速并顯示實時滴速,并且該系統能夠實現精確調速。當異常情況發生或者輸液完畢時,該系統發出聲光報警并自動關斷藥液。該系統不但可以減輕護理人員的工作量,還能使病人得到更好的休息和治療,可提高靜脈輸液的治療效果。該系統具有高可靠性、安全衛生的特點,可廣泛在醫療行業推廣使用。該系統已經做成實物并經過大量實驗。
1 系統組成和工作原理
智能輸液滴速調節系統的硬件組成如圖1所示。主要包括液體滴速檢測模塊、PWM波調節蠕動泵模塊、顯示模塊、按鍵模塊、報警模塊等電路。該系統選擇ATMEGA16作為控制核心。

圖1 系統的硬件結構組成
1.1 藥滴檢測原理
該系統采用紅外傳感技術,將方形紅外對射裝置安裝在茂菲管兩側[2]。方形紅外發光二極管發射紅外光,紅外光穿過茂菲管照射到方形光敏三極管。方形光敏三極管將接收到的光強轉換成電流輸出。當茂菲管沒有藥液滴落時,紅外光光強損失小,光敏三極管產生的光電流較大。當茂菲管里有藥滴滴落時,藥滴吸收并散射大部分紅外光,紅外光光強損失較大,光敏三極管產生的光電流較小。采用圖2的電路將電流的變化轉化為電壓的變化。最終通過檢測光敏三極管輸出端的電壓變化來檢測茂菲管里是否有藥液滴落。
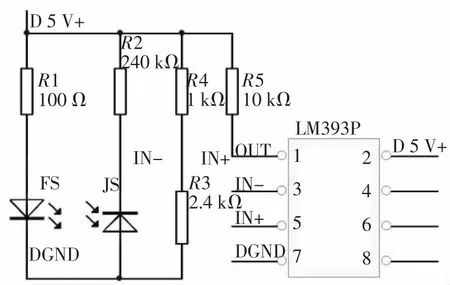
圖2 滴速檢測電路
1.2 滴速檢測電路
滴速檢測電路主要由紅外發射、紅外接收、比較器整形三個部分組成,如圖2所示。
紅外發光二極管在5 V電源系統下持續發出恒定頻率的紅外光,當茂菲管里沒有藥液滴落時,接收管輸出端的電壓較小,經過比較器整形過后將在比較器端輸出一個接近5 V的高電平。當有藥液滴落擋住紅外光時,接收管輸出端的電壓較大,經過比較器整形將在比較器的輸出端輸出一個接近0 V的低電平。當藥液不斷滴落時,將在比較器輸出端形成一個標準的矩形波正向脈沖。波形如圖3所示。其中低電平代表有液滴滴下,高電平代表無液滴滴落。將比較器輸出端連接到AVR單片機P0.2引腳上,單片機通過檢測該脈沖的上升沿判斷是否有液滴滴落。
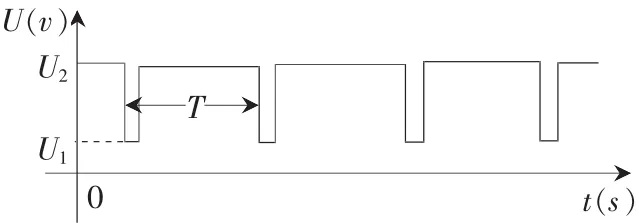
圖3 滴速檢測電路輸出波形
1.3 滴速調節原理和控制原理
該系統選擇蠕動泵作為滴速調節的執行元件。蠕動泵是一種可控制流速的液體輸送裝置并且具有關斷功能,通過改變蠕動泵兩端的電壓即可達到控制滴速的功能。蠕動泵對藥液無污染,且蠕動泵軟管易于更換,滴速控制精確,調速簡單方便。該系統正是通過調節蠕動泵的端電壓來調節液體滴速。當人為地設定滴速后,單片機將自動調節蠕動泵的端電壓,使得藥液滴速與設定值相近,并在數碼管顯示出實時滴速。
1.4 滴速調節電路
滴速調節電路由前級濾波電路和后級放大電路組成,如圖4所示。該電路的PWM0連接到單片機P1.4口,DAOUTO和DGND連接到蠕動泵兩端。該系統通過單片機改變PWM波的占空比來調節蠕動泵的輸出電壓在0 V~10 V之間變化,從而改變液體的滴落速度,最終間接實現了通過改變P1.4口PWM波占空比來調節液體的滴速。自動關斷模式就是單片機自動調節使得輸出電壓為0 V。

圖4 滴速調節電路
2 系統的軟件設計
該系統的軟件包括主程序、滴速檢測、PWM波調速、按鍵滴速設置、數碼管顯示、報警功能等子程序。智能輸液滴速調節系統總流程圖如圖5所示。
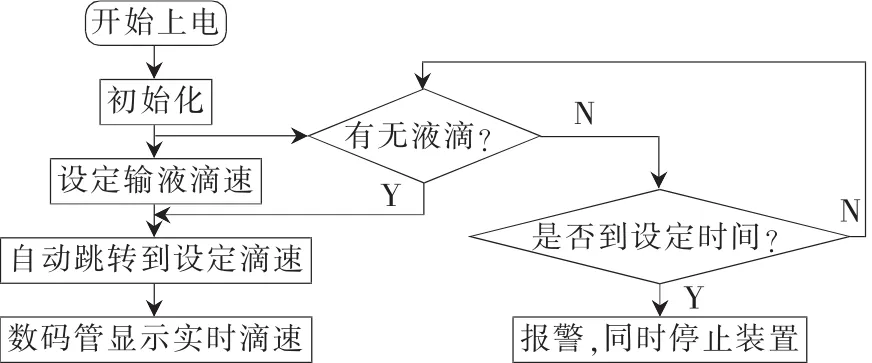
圖5 智能輸液滴速調節系統總流程圖
2.1 滴速測量子程序
檢測藥液滴速的方法有測頻和測周兩種方式,該系統選擇測周的方式測量藥液的滴落速度,分析如下。
(1)測頻,在固定時間范圍內測量點滴的個數以得到當前點滴速度:V=n/T。由于這種方法在點滴速度較慢時需要的測速周期過長,如點滴速度為20滴/s時,測取相鄰兩滴的間隔時間至少為3 s,而設定的時間段必須遠大于3 s。這樣就很難達到實時監控的目的,而且此時誤差也會相對變大。
(2)測周,系統中利用軟件方式定義了一個內部時鐘,該時鐘利用定時器中斷計時。通過外部中斷使其啟動及復位,并讀取時間T,進而利用下式計算出點滴速度:V=60 n/T(滴/min),式中T的單位為s。測周的誤差與系統定時的誤差有關,所以該系統選取計時精度為1 ms;考慮到實時性的要求,選取n為1,實踐表明,此種測量方案完全能達到精度要求。
由于一些客觀原因,該系統測量的滴速波動性比較大,為了能準確測量滴速不致于偏差太大,采用了連續測量3個液滴的周期總和再取平均值的方法,較好地減小了誤差。程序流程圖如圖6所示。

圖6 滴速測量子程序流程圖

圖7 PWM波調速子程序流程圖
2.2 PWM波調速子程序
智能輸液滴速調節系統可以設置滴速。通過蠕動泵自動運轉使輸液滴速調節至設定值,其原理是通過調節脈沖的占空比來調節蠕動泵兩端的電壓,從而間接影響其轉速,因此可以建立占空比與滴速的關系,進而實現自動調節。
PWM脈寬調制可以通過調節其占空比,通過后續電路處理,來控制輸出電壓。而輸出頻率的變化可通過改變此脈沖的調制周期來實現[3]。
該子程序采用兩個定時器。采用定時器T0來控制頻率,定時器T1來控制占空比。大致的編程思路:T0定時器中斷讓一個I/O口輸出高電平,在T0中斷當中起動定時器T1,而這個T1是讓I/O口輸出低電平,這樣改變定時器T0的初值就可以改變頻率,改變定時器T1的初值就可以改變占空比。
如果不需要改變頻率,只需要改變占空比,那么只需要用一個定時器即可。此時定時一定的時間,讓一個I/O口循環顯示高低電平即可。具體流程圖如圖7所示,圖中sbit_pwm為PWM波輸出I/O口。
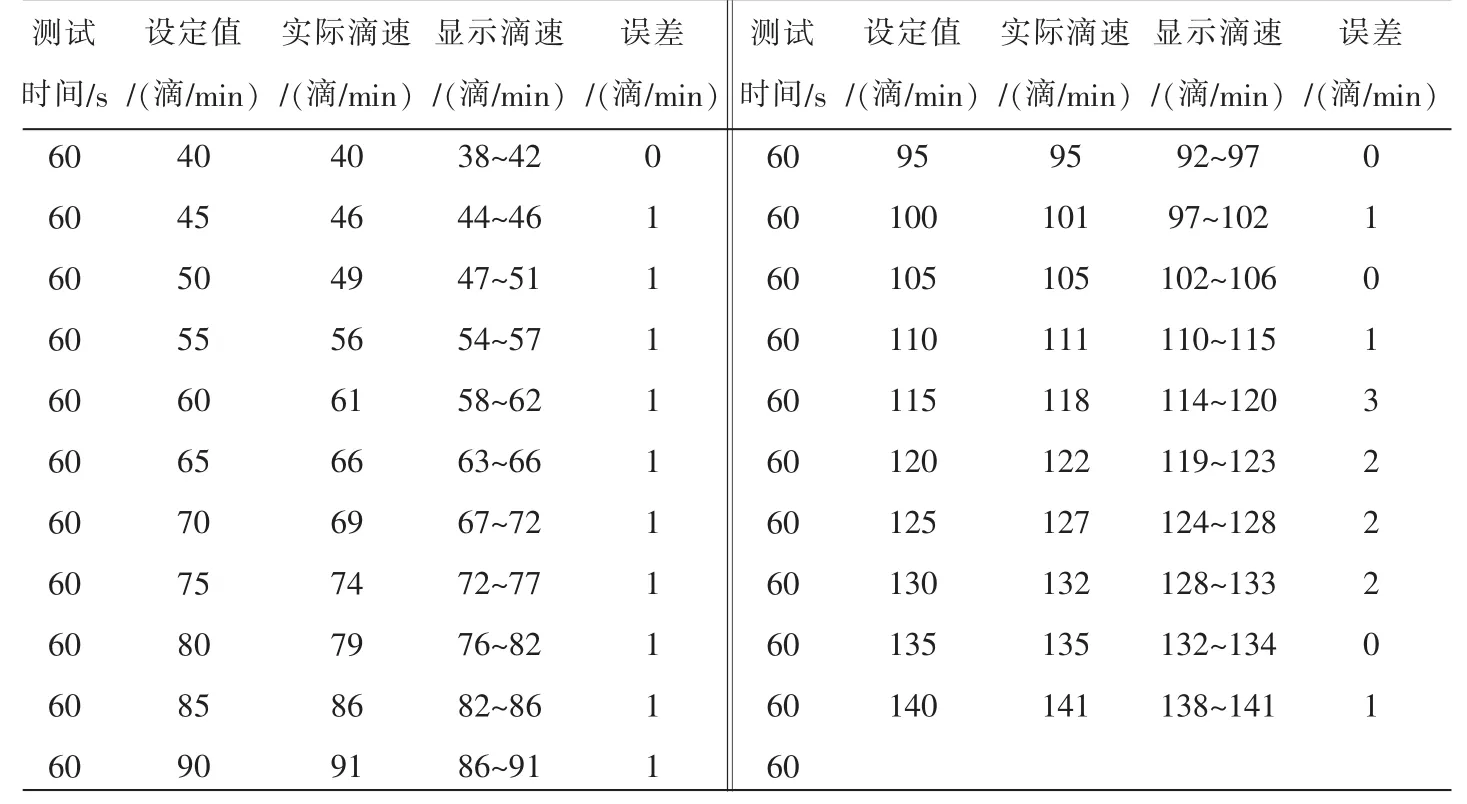
表1 滴速設定及相關穩定時間測量結果
3 產品測試數據結果分析
從表1分析得出,無論是在全過程范圍內,還是在一個較小的調整范圍內,實際誤差最大為3滴/min。該數據證明該系統具有較高的可靠性和精確性。
4 結束語
本文通過軟件設計和硬件設計,設計出一套智能輸液速度調節系統。該系統能夠根據不同的病人設置不同的輸液滴速,并自動精確地調速到設定滴速。該系統能夠測量并顯示輸液滴速。當輸液完畢或者有突發情況時,該系統能自動發出報警并關斷輸液裝置。測試結果表明,該系統安全、衛生、操作方便、可靠性高、精確度高,并有廣泛的應用前景和實用價值。
[1]徐冬冬,郭薇,葛小宇.無線輸液報警系統設計[J].南京信息工程大學學報,2013,5(6):548-552.
[2]康華光.電子技術基礎[M].北京:高等教育出版社,2006.
[3]楊光友.單片機微型計算機原理與接口技術[M].北京:中國水利水電出版社,2012.
The system of intelligent transfusion speed regulation
Wang Zhongtao,Ren Tianping,Xin Guanxi,Feng Pengfei
(College of Mechanical Engineering,Zhengzhou University,Zhengzhou 450001,China)
The system of intelligent transfusion speed regulating is developed.The system uses AVR single chip microcomputer as the core.The principle of infrared ray is used to detect whether the drop in the Murphy tube is falling or not.At the same time,the system uses a peristaltic pump as regulating mechanism for the speed of drop.The system can set the liquid dripping speed and display real-time dripping speed by keys.In addition,the system can make sound and light alarm and automatic shutdown in the abnormal condition or the completion of infusion.The test result shows that the system has high reliability,low cost,safety,sanitation,handiness.And the system has extensive market value and generalization in conventional medicine.
intelligent transfusion;AVR single chip microcomputer;peristaltic pump;automatic shutdown
TP23
A
1674-7720(2015)09-0096-03
2014-11-01)
王中陶(1991-),男,碩士研究生,主要研究方向:機電檢測與控制技術。
任天平(1970-),男,副教授,碩士研究生導師,主要研究方向:機電檢測與控制技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45